Tříkroková
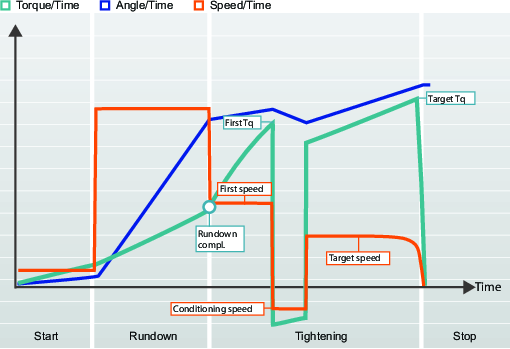
Tříkroková strategie utahování přidává mezi první a závěrečný krok další krok uvolnění za účelem překonání účinků krátkodobého úbytku předpětí z důvodu uložení a pro zmenšení rozptylu předběžného zatížení. Tento postup se někdy používá ke kondiciování spoje. To může být užitečné například u spojů s mnoha styčnými povrchy a bude to mít mnohem silnější vliv na nové díly než na opakovaně použité díly, a to díky uhlazení styčných povrchů, které snižují nutnost uložení.
Kondiciování spoje se provádí utažením v prvním kroku na daný utahovací moment, První moment, uvolněním zatížení otočením matice o zadaný úhel kondiciování a poté opětovným utažením matice na její Cílový moment.
V níže uvedené tabulce je uveden seznam všech parametrů pro tříkrokovou strategii utahování. Některé parametry jsou povinné, některé jsou volitelné a některé jsou podmíněné.
Podmíněné parametry se nezobrazují v nabídce konfigurace, pokud podmínka neplatí, což nastává i v situaci, kdy jsou určité funkce deaktivovány.
Tabulka níže platí pro Závěrečný cíl = utahovací moment.
Při dosažení hodnoty První cíl a vstupu do fáze kondiciování se nástroj okamžitě zastaví, spustí zpětný chod a teprve poté pokračuje v závěrečném kroku. Aby byla zlepšena ergonomie ručních nástrojů, je nutno krok kondiciování vyladit.
Parametry pro hodnotu utahovacího momentu jako závěrečného cíle.
Název parametru | Stav | Popis | Výchozí hodnota |
|---|---|---|---|
Cíl |
| Utahovací moment nebo úhel lze vybrat z místní nabídky |
|
První moment | Cíl = moment |
|
|
První rychlost |
| Volí se přepínači První rychlost lze volit automaticky nebo ručně |
|
První rychlost | První rychlost = ruční | Udává rychlost nástrojů během prvního kroku |
|
Úhel kondiciování | Strategie = Tříkroková | Úhel pro otočení hlavice zpět během kroku kondiciování | 180° |
Rychlost kondiciování | Strategie = Tříkroková | Cílová rychlost pro zpětné otáčení během kroku kondiciování | 345 ot./min. |
Cílová rychlost |
| Volí se přepínači Cílovou rychlost lze volit automaticky nebo ručně |
|
Cílová rychlost | Cílová rychlost = ruční | Udává rychlost nástrojů během závěrečného kroku |
|
Cílový moment |
| Definuje cílový utahovací moment v závěrečném kroku utahování |
|
Limity utahovacího momentu |
| Volí se přepínači Maximální a minimální hodnoty momentu lze volit automaticky nebo ručně |
|
Min. moment | Limity momentu = Ruční | Hodnota momentu pro dolní limit | 95 % cílového momentu |
Max. moment | Limity momentu = Ruční | Hodnota momentu pro horní limit | 120% cílového momentu |
Limity úhlu |
| Limity úhlu se aktivují z místní nabídky. Vypnuto: Bez monitoringu úhlu. Od dokončení doběhu: Monitorovací okno je nastaveno od okamžiku dosažení momentu Doběh dokončen. Od prvního momentu: Monitorovací okno je nastaveno od okamžiku dosažení Prvního momentu. Z momentu: Monitorovací okno je nastaveno od okamžiku dosažení určité hodnoty momentu. |
|
Moment monitorování závěrečného úhlu | Limity úhlu = od momentu | Hodnota momentu utahování, od které jsou nastaveny limity úhlu doběhu |
|
Min. úhel | Limity úhlu = Zapnuto | Dolní limit hodnoty úhlu | 324° |
Max. úhel | Limity úhlu = Zapnuto | Horní limit hodnoty úhlu | 396° |
Min. čas | Limity úhlu = Zapnuto | Minimální čas pro krok Rozsah 0–99999 ms | 0 ms |
Max. čas | Limity úhlu = Zapnuto | Maximální čas pro krok Rozsah 1–99999 ms | 1000 ms |
Měřit moment při |
| Vybírá se z místní nabídky: Max. hodnota momentu: Měří nejvyšší hodnotu utahovacího momentu během utahování. Hodnota při max. úhlu: Měří hodnotu utahovacího momentu při nejvyšší hodnotě úhlu. Vypnutí: Měří hodnotu utahovacího momentu před začátkem kroku zastavení. |
|
Kompenzace momentu |
| Vybírá se z místní nabídky: Zapnuto: Kompenzuje hodnotu závěrečného momentu naměřeným momentem během doběhu v kompenzačním bodě momentu. Vypnuto: Nepoužije se žádná kompenzace momentu. | Vypnuto |
Kompenzační bod momentu | Kompenzace momentu = Zapnuto | Kompenzační bod momentu se nastavuje podle zpětných údajů o určitém úhlu z fáze Doběh dokončen.
| 45° |
Změřit úhel k | Limity úhlu = Zapnuto Nebo Závěrečný cíl = úhel | Vybírá se z místní nabídky: Hodnota při špičkovém momentu: Měří hodnotu úhlu při maximálním momentu během utahování. Max. hodnota úhlu: Měří maximální hodnotu úhlu během utahování. Vypnutí: Měří hodnotu úhlu před začátkem kroku zastavení.
| |
Doba detekce předčasné ztráty momentu | 200 ms | ||
Monitorování proudu | Vybírá se z místní nabídky: Zapnuto: Monitorování proudu je zapnuto. Vypnuto: Monitorování proudu je vypnuto. Monitorování proudu se používá jako redundantní kontrola měřeného momentu, aby se získala přiměřená důvěra v tom, že čtení momentu jsou správná. | ||
Horní limit proudu při vypnutí. | Monitorování proudu = Zapnuto | Hodnota proudu musí být vyšší než 0 a nižší než maximální proud nástroje. | |
Dolní limit proudu při vypnutí. | Monitorování proudu = Zapnuto | Hodnota proudu musí být vyšší než 0 a nižší než horní limit proudu. |
V níže uvedené tabulce je uveden seznam všech parametrů pro tříkrokovou strategii utahování. Některé parametry jsou povinné, některé jsou volitelné a některé jsou podmíněné.
Podmíněné parametry se nezobrazují v nabídce konfigurace, pokud podmínka neplatí, což nastává i v situaci, kdy jsou určité funkce deaktivovány.
Parametry pro hodnotu utahovacího momentu jako závěrečného cíle.
Název parametru | Stav | Popis | Výchozí hodnota |
|---|---|---|---|
Cíl |
| Utahovací moment nebo úhel lze vybrat z místní nabídky |
|
První moment | Cíl = úhel |
|
|
První rychlost |
| Volí se přepínači První rychlost lze volit automaticky nebo ručně |
|
První rychlost | První rychlost = ruční | Udává rychlost nástrojů během prvního kroku |
|
Úhel kondiciování | Strategie = Tříkroková | Úhel pro otočení hlavice zpět během kroku kondiciování | 180° |
Rychlost kondiciování | Strategie = Tříkroková | Cílová rychlost pro zpětné otáčení během kroku kondiciování | 345 ot./min. |
Cílová rychlost |
| Volí se přepínači Cílovou rychlost lze volit automaticky nebo ručně |
|
Cílová rychlost | Cílová rychlost = ruční | Udává rychlost nástrojů během závěrečného kroku |
|
Min. moment | Hodnota momentu pro dolní limit | 95 % cílového momentu | |
Max. moment | Hodnota momentu pro horní limit | 120% cílového momentu | |
Cílový úhel |
| Cílová hodnota pro závěrečný krok |
|
Limity úhlu |
| Limity úhlu se aktivují z místní nabídky. Automaticky: Nastavuje automaticky algoritmus. Ruční: Limity se nastavují ručně. |
|
Min. úhel | Limity úhlu = Ruční | Dolní limit hodnoty úhlu | 324° |
Max. úhel | Limity úhlu = Ruční | Horní limit hodnoty úhlu | 396° |
Min. čas | Limity úhlu = Ruční | Minimální čas pro krok Rozsah 0–99999 ms | 0 ms |
Max. čas | Limity úhlu = Ruční | Maximální čas pro krok Rozsah 1–99999 ms | 1000 ms |
Měřit moment při |
| Vybírá se z místní nabídky: Max. hodnota momentu: Měří nejvyšší hodnotu utahovacího momentu během utahování. Hodnota při max. úhlu: Měří hodnotu utahovacího momentu při nejvyšší hodnotě úhlu. Vypnutí: Měří hodnotu utahovacího momentu před začátkem kroku zastavení. |
|
Kompenzace momentu |
| Vybírá se z místní nabídky: Zapnuto: Kompenzuje hodnotu závěrečného momentu naměřeným momentem během doběhu v kompenzačním bodě momentu. Vypnuto: Nepoužije se žádná kompenzace momentu. | Vypnuto |
Kompenzační bod momentu | Kompenzace momentu = Zapnuto | Kompenzační bod momentu se nastavuje podle zpětných údajů o určitém úhlu z fáze Doběh dokončen.
| 45° |
Doba detekce předčasné ztráty momentu | 200 ms | ||
Monitorování proudu | Vybírá se z místní nabídky: Zapnuto: Monitorování proudu je zapnuto. Vypnuto: Monitorování proudu je vypnuto. Monitorování proudu se používá jako redundantní kontrola měřeného momentu, aby se získala přiměřená důvěra v tom, že čtení momentu jsou správná. | ||
Horní limit proudu při vypnutí. | Monitorování proudu = Zapnuto | Hodnota proudu musí být vyšší než 0 a nižší než maximální proud nástroje. | |
Dolní limit proudu při vypnutí. | Monitorování proudu = Zapnuto | Hodnota proudu musí být vyšší než 0 a nižší než horní limit proudu. |









































