임펄스 - 단일 스텝 전략
아래의 원칙은 직접 구동 전자 공구에 적용할 수 있습니다. Atlas Copco SRB 시리즈 공구에 적요할 수 있습니다.
각 펄스 기간 후 나사의 결과적 토크는 증가됩니다. 일련의 펄스 후 최종 토크 목표에 도달합니다.
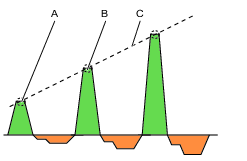
A | 펄스 N에서의 최대 양 에너지 |
B | 펄스 N+1에서의 최대 양 에너지 |
C | 에너지 증가(토크) |
조치 단계와 반작용 단계의 에너지 레벨은 사용자 구성 가능한 매개변수입니다. 이러한 두 매개변수의 조합은 운영자 편의와 결합된 효과적인 조임을 만듭니다. 다음과 같이 각 기간에 전달할 수 있는 최대 에너지의 백분율로 두 단계에서 에너지의 양을 설정할 수 있습니다.
펄스 에너지. 펄스 기간에 적용할 수 있는 최대 에너지의 백분율로 각 양의 펄스에 적용되는 에너지의 양. 이 값은 10-100% 사이입니다.
반동력 유지 인자. 펄스 기간에 적용할 수 있는 최대 에너지의 백분율로 각 반작용 펄스에 적용되는 에너지의 양. 이 값은 0-75% 사이입니다.
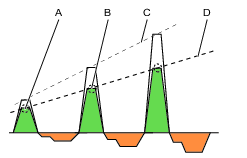
A | 펄스 N에서 감소한 양의 에너지 |
B | 펄스 N+1에서 감소한 양의 에너지 |
C | 최대 펄스 에너지를 사용해서 토크 증가를 위한 결과 원곡선. |
D | 감소한 펄스 에너지를 사용해서 토크 증가를 위한 결과 원곡선. |
작은 펄스 에너지(감소한 에너지)에는 토크가 더 작은 단계에서 증가됨으로 목표 토크에 도달하려면 더 많은 펄스가 필요합니다. 더 작은 단계에서는 목표에 도달하면 조임을 종료하기 위해 보다 나은 정확도를 제공합니다. 더 작은 펄스는 공구의 움직임을 줄여 주고 작업자 편의를 높여 줍니다.
정확하게 조정된 반동력 유지 인자는 원하는 작업자 편의를 구성합니다. 인자가 너무 높을 경우 작업자는 공구가 시계 방향으로 회전한다고 느낍니다. 인자가 너무 낮을 경우 작업자는 공구가 시계 반대 방향으로 회전한다고 느낍니다.
이상적인 구성에서 반작용 에너지는 어떠한 푸는 힘을 창출하지 않습니다. 목표 값에 도달하기 위한 펄스의 양이 증가할 경우, 값이 너무 높게 설정되고 각 펄스에서 작은 풀림이 발생합니다.
펄스 에너지 및 반동력 유지 인자에 대한 최적의 값은 최적의 공구 성능과 최상의 작업자 편의를 위해 조정되어야 합니다.









































