텐서펄스(TensorPulse) 전략
TensorPulse 조임 단계를 사용하기 전에 컨트롤러에 다음 라이센스 유형을 설치해야 합니다.
낮은 반응력 전략
TensorPulse는 다음 공구에만 유효합니다. ETV-STR61-100-13, ETV-STR61-70-13 및 ETV-STR61-50-10.
이 단계는 토크 목표에 도달할 때까지 순방향으로 조임 펄스를 생성합니다.
TensorPulse를 실행하는 경우, 필요한 PulseDrive 소켓/어댑터를 사용하세요. PulseDrive 소켓/어댑터
없이 TensorPulse 조임 단계를 실행하면 모든 조임이 NOK입니다. 펄스드라이브 소켓/어댑터가 없는 경우, “펄스드라이브 소켓/어댑터가 감지되지 않음” 단계 오류가 표시됩니다.
아래의 원칙은 직접 구동 전자 공구에 적용할 수 있습니다. Atlas Copco SRB 시리즈 공구에 적요할 수 있습니다.
펄스 조임은 모터의 전류를 펄싱하는 기법을 사용하는데, 다음과 같은 두 가지 분명한 기능이 있습니다.
조임 방향에서 양의 토크를 추가하는 활동 전류.
역방향 토크를 적용해서 컴포트 반작용을 만드는 반응 전류.
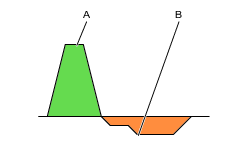
A | 조임력을 적용하는 활동 펄스. |
B | 편의를 위한 반응 펄스 |
아래의 그림은 현재 펄스 조임 전략에 대한 일반적인 원칙을 표시합니다. 상세 곡선은 공구 유형과 조임 알고리즘에 따라 다릅니다.
펄스 기간은 그림과 같이 활동 전류와 반응 전류, 2단계로 구성되어 있습니다. 각 활동 펄스는 최종 목표에 도달할 때까지 조임에 토크를 추가합니다. 각 반작용 펄스는 편안한 반작용을 제공하는 저항력을 만듭니다.
조치 단계와 반작용 단계의 에너지 레벨은 구성 가능한 매개변수입니다. 이러한 두 매개변수의 조합은 운영자 편의와 결합된 효과적인 조임을 만듭니다.









































