Loose
Parameter | Description |
|---|---|
Required tag number | A specific number must be written in the TAG of the end fitting tool. |
Name | Name of the tightening program. |
Rundown complete torque | Torque value from which the tightening operation starts. |
Torque min | Lower torque limit. |
Torque max | Higher torque limit. |
Change bolt limit | If the torque applied reaches this limit, the message Change screw is shown on the wrench display. |
Target angle | The angle target. |
Torque units | Select the unit of measurement. |
Torque correction coefficient | When extensions are used, the wrench measurement might be compensated to show a more accurate torque value. To calculate the correction coefficient, please refer to How to calculate the Torque Correction Coefficient. When extensions are not used, Torque correction coefficient = 1. |
Angle correction | When extensions cause additional wrench bending, the wrench angle measurement can be compensated to show a more accurate angle value. When extensions are not used, Angle correction = 0. |
Batch size | Number of tightenings the batch will perform. |
End cycle time | Starts when the torque goes below the Rundown complete torque after reaching the Target angle. |
Ratchet time | Starts when the torque goes below the Rundown complete torque without reaching the Target angle value. |
This strategy is used to loosen a tightened screw. This is typically used in the sequence of a Multistep program.
For example:
Tighten the screw to 40 Nm
Loosen the screw by 30°
Tighten the screw to 50 Nm
The torque result is measured at the specified Target angle value.
If the Target angle is left at zero, this strategy automatically looks for torque / angle values to detect if the loosening process has been completed.
If a Target angle value is specified, loosening must reach the Target angle value in order to consider the result as OK.
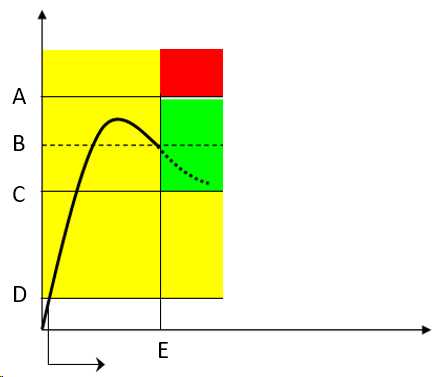
A | Torque max | B | Target torque |
C | Torque min | D | Rundown complete torque |
E | Target angle |
The green area defines the OK result area.
During the tightening operation, LEDs, buzzer and vibration are activated as follows:
LED:
White LED: activated when the Rundown complete torque is reached.
Buzzer:
The beep starts when the torque goes over the Rundown complete torque value; the signal increases when the Target angle is reached / the loosening process has been completed.
Vibration:
Starts when the Target angle is reached.
At the end of the tightening operation, LEDs, buzzer and vibration are activated as follows:
LEDs:
Green LEDs: torque result within the minimum and maximum limits.
Red LEDs: torque result over the Torque max.
Buzzer
Two beeps indicate the end of the operation; if the final result is in the red area, the signal in continuous.
To stop the buzzer, start a new tightening operation or press a button on the tool controller.
Vibration:
Stays active until the torque applied is released.









































