단계 제한
다음 섹션에서는 PowerFocus 6000 컨트롤러 및 PowerFocus 6000 StepSync 컨트롤러에 사용할 수 있는 단계 제한 사항에 대해 설명해 드리겠습니다.
PowerFocus 6000 StepSync 컨트롤러에서는, 조임 프로그램에서 동기화 지점을 사용할 수 있으며 제한에 설정된 조건이 충족되면, 공구는 즉시 중지되고 프로그램은 다음 동기화 지점으로 이동하거나(Power Focus 6000 StepSync 및 PF6 Flex 시스템 컨트롤러에만 적용됨), 프로그램 끝으로 이동합니다. 반면에 PowerFocus 6000 컨트롤러의 경우, 공구는 즉시 중지되고 프로그램은 프로그램 끝으로 이동합니다.
예기치 않은 일이 발생하는 경우에 조임을 분명히 중지하기 위해 다단계 조임 프로그램에 제한을 추가할 수 있습니다. 각 제한에 대해, 복구 가능 = 예를 선택하여 조임이 멈출 때 재시도를 허용해 주세요. 다단계 프로그램의 각 단계에는 최대 4가지 제한이 있을 수 있습니다.
다음 제한이 자동으로 다단계 조임 프로그램에 추가되는 모든 단계에 추가됩니다.
단계 제한 | 적용 단계 |
|---|---|
단계 제한 최대 시간 | 외부 결과 및 MWR을 제외한 모두 |
단계 제한 최대 토크 |
|
단계 제한 최대 각도 |
|
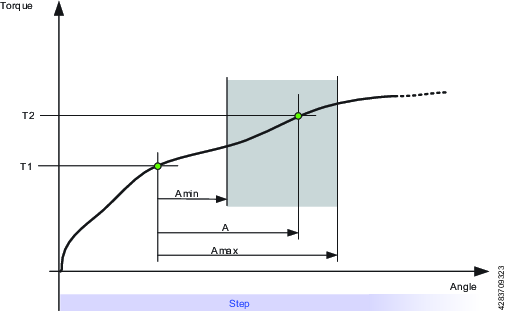
CTh - 크로스 스레드
이 제한은 토크가 시작 토크(T1)를 통과하는 지점부터 종료 토크(T2)를 통과하는 지점까지의 각도를 점검합니다. 시작 토크(T1)에서 측정된 각도가 상한(Amax)보다 높은 경우, 이 공구는 즉시 중지됩니다.
토크가 종료 토크(T2)를 통과할 때 측정된 각도는 최소 각도 한계(Amin)에 대해 검사됩니다. 각도가 이 한계보다 낮으면 공구가 즉시 정지합니다.
매개변수 | 설명 | 그림 내 |
|---|---|---|
시작 토크 | 필수 조건: <= 0. | T1 |
종료 토크 | 필수 조건: <= 0. | T2 |
최소 한계 | 낮은 각도 한계 | A 최소 |
최대 한계 | 높은 각도 한계 | A 최대 |
A - 최대 각도
이 제한은 각도를 측정합니다. 측정된 각도가 최대 한계에 도달하면 공구는 즉시 중지됩니다. 각도는 제한의 시작부터 측정되고, 또는 지정된 경우, 토크가 제한되는 동안 트리거 토크를 처음 통과한 지점부터 측정됩니다.
매개변수 | 설명 |
|---|---|
트리거 토크 | 지정된 경우, 이 각도가 측정되는 위치의 토크입니다. |
최대 한계 | 이 한계에 도달하면 공구는 즉시 중지됩니다. |
T - 최대 토크
이 제한은 해당 토크를 검사합니다. 측정된 토크가 최대 한계를 초과하면 공구는 즉시 중지됩니다.
매개변수 | 설명 |
|---|---|
최대 한계 | 토크가 최대 한계를 초과하면 공구는 즉시 중지됩니다. |
Ti – 최대 시간
이 제한이 시간을 점검합니다. 최대 한계에 도달한 경우, 공구는 즉시 정지합니다.
매개변수 | 설명 |
|---|---|
최대 한계 | 이 시간이 경과하면 공구는 즉시 중지됩니다. |
RH - 리히트
이 제한은 해당 토크를 검사합니다. 측정된 토크가 토크 감지를 벗어난 경우 공구는 즉시 중단되며, 프로그램은 프로그램의 끝으로 이동합니다. 단계 리히트 제한은 다단계 조임 프로그램의 첫 번째 단계에만 추가할 수 있습니다. 일단 리히트 제한이 첫 번째 단계에 추가되면, 해당 단계를 조임 프로그램 내의 다른 위치로 이동할 수 없습니다. 조임 프로그램에서 다른 위치로 이동하려면 리히트 제한을 첫 번째 단계에서 삭제해야 합니다.
매개변수 | 설명 |
|---|---|
감지 토크 | 측정된 토크가 토크 감지를 벗어난 경우 공구는 즉시 중단되며, 프로그램은 프로그램의 끝으로 이동합니다. 크기가 0보다 커야 함 |
RT - 잔류 토크
이 제한은 토크를 확인하고 측정된 토크가 제한 조건 미만인 경우, 공구는 즉시 정지되고, 프로그램은 프로그램의 끝으로 이동합니다. 토크 및 각도 제어 프로세스에 대한 잔류 토크 제한을 제거하는 두 가지 방법이 있습니다
매개변수 | 설명 |
|---|---|
유형 | 토크 제어 프로세스 또는 각도 제어 프로세스. 토크 제어 프로세스: 토크 제어 프로세스는 토크를 점검합니다. 측정된 토크가 잔류 토크 한계 미만인 경우 공구는 즉시 중단되며, 프로그램은 프로그램의 끝으로 이동합니다. 제한이 활성화되려면 토크는 먼저 잔류 토크 한계의 110%를 초과해야 합니다. 각도 제어 프로세스: 이 제한은 도달된 최대 토크가 제한치 내에 있는지 점검합니다. 제한이 활성화되려면 토크는 먼저 트리거 토크를 초과해야 합니다. 측정된 토크가 잔류 토크 시간보다 긴 시간 동안 최대 토크 미만인 경우 공구는 즉시 중단되며, 프로그램은 프로그램의 끝으로 이동합니다. 케이블 공구는 각도를 위한 취소 토크를 선택하는 옵션이 있습니다. 이 제한을 제어하는 두 매개변수: 피크 토크율 및 잔류 토크 시간. 백분율은 마지막 피크 토크로부터 하향 편차를 설정하고, 잔류 토크 시간은 편차의 기간(5 ~ 500 ms)을 설정합니다. (설정 기간 동안 표시된 백분율보다 같거나 낮은) 두 조건이 모두 충족되는 경우에만 프로그램이 중단되고 끝으로 이동됩니다. |
취소 토크 한계 | 기본값: 10 Nm 필수 조건: > 0. |
TG - 토크 경사도
이 제한은 경사도를 점검하고 한계를 벗어나면 공구는 즉시 멈추고 프로그램은 프로그램의 끝으로 이동합니다.
매개변수 | 설명 |
|---|---|
경사도 각도 창 | 각도 창을 지정합니다:
|
각도 창 | 경사도 각도 창이 수동으로 설정된 경우 사용할 수 있습니다. > 0 및 <= 100을 충족해야 합니다. |
트리거 토크 | 필수 조건: >= 0 및 < 공구 최대 토크 |
댐핑 | 경사도가 계산되는 빈도입니다. 필수 조건: > 0 및 < 100 및 < 각도 창. |
최소 한계 | 필수 조건: >= -100. |
최대 한계 | 필수 조건: -100 및 > 하한 |
토크 필터 유형 | 필터 유형
|
차단 주파수 | 토크 필터 유형이 저역 통과로 설정된 경우 지정해야 합니다.
|
샘플 수 | 토크 필터 유형이 슬라이딩 평균으로 설정된 경우 지정해야 합니다.
|
TAW - 각도 창 내의 토크
이 제한은 각도 창 길이가 토크 한계 사이에 있는지 점검합니다. 측정된 토크가 한계를 벗어난 경우 공구는 즉시 중단되며, 프로그램은 프로그램의 끝으로 이동합니다. 토크가 트리거 토크를 처음 통과한 지점의 시작 각도에서 각도 창 길이가 시작합니다. 트리거 토크가 설정되지 않은 경우, 시작 각도가 제한의 시작 부분에서 시작됩니다.
각도 창 길이의 끝에 도달하지 않은 경우, 제한의 상태는 NOK입니다.
매개변수 | 설명 |
|---|---|
트리거 토크 | 필수 조건: >= 0 |
시작 각도 | 필수 조건: >= 0 |
창 길이 | 필수 조건: > 0 |
최소 한계 | 필수 조건: >= 0 |
최대 한계 | 필수 조건: <= 최소 한계 |
TCD - 토크 대 전류 편차
이 제한은 대응하는 토크로 변환된 모든 전류 측정 상한이 토크 트랜스듀서가 있는 실제 측정 토크에서 최대 편차에 있는 것을 확인합니다. 제한은 토크가 단계 도중에 처음으로 트리거 토크에 도달할 때 시작하며, 단계가 목표에 도달할 때까지 활성화됩니다.
트리거 토크에 도달하지 않은 경우, 모니터가 OK를 출력합니다.
매개변수 | 설명 |
|---|---|
트리거 토크 | 필수 조건: >= 0 |
최대 편차 | 기본값: 1, > 0을 충족해야 합니다. |
PCH-펄스 카운트 높음
펄스 카운트 높음 단계 제한을 사용하기 전에 컨트롤러에 다음 라이센스 유형을 반드시 설치해야 합니다.
낮은 반응력 전략
펄스 카운트 높음은 다음 공구에만 유효합니다. ETV-STR61-100-13, ETV-STR61-70-13, ETV-STR61-50-10.
이 한계는 펄스 수를 제한하고 지정된 펄스 카운트 상한 미만이 되도록 유지합니다.
측정된 펄스 수가 펄스 수 상한 보다 높은 경우, 공구는 즉시 중단되며, 프로그램은 다음 동기화 지점 또는 프로그램의 끝으로 이동합니다.
토크 트리거 레벨이 설정되어 있는 경우 측정된 토크가 토크 트리거 레벨 이상이 되는 즉시 확인이 시작됩니다.
펄스 카운트 높음 단계 제한으로 조임 단계를 실행하는 경우, 필요한 펄스드라이브 소켓/어댑터를 사용합니다.
펄스드라이브 소켓/어댑터 없이 조임 단계가 실행되면 모든 조임은 NOK입니다. 펄스드라이브 소켓/어댑터가 없는 경우, “펄스드라이브 소켓/어댑터가 감지되지 않음” 단계 오류가 표시됩니다.
매개변수 | 설명 |
|---|---|
Pulse Count High Limit - n+ | 펄스 카운트 상한 범위는 1 ~ 9999999 사이이어야 합니다. |
Torque Trigger - Tt | 토크 트리거 0부터 공구의 최대 토크까지의 범위로 설정해야 합니다. |









































