조임
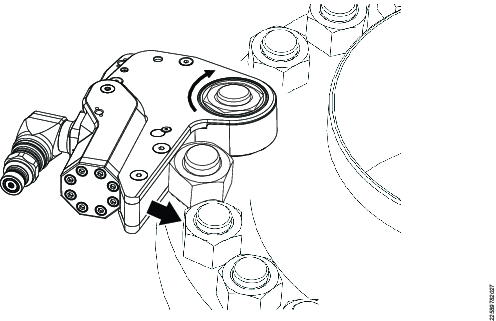
조임 작업을 수행할 패스너에 공구를 놓습니다. 리액션 암이 적절한 리액션(반응) 지점에 닿을 때까지 공구를 리액션(반응) 표면 쪽으로 밀어주세요.

반응력 구조는 유압 공구의 반응력을 견딜 수 있을 만큼 견고해야 합니다.
리액션 암이 미끄러질 수 있는 점점 가늘어지는 표면은 피해야 합니다. 역하중 및 공구 불안정성이 발생할 가능성이 있기 때문입니다.
반응 구조를 만들기 위해 느슨한 스페이서를 사용하지 마십시오. 표준 반응암이 적합하지 않은 경우 Atlas Copco에 문의하십시오.
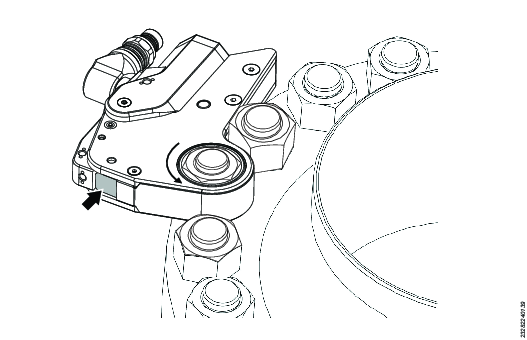
리모컨 펜던트의 진행 버튼[1]을 눌렀다 놓아 펌프를 작동하십시오.
보조 손잡이로 공구를 지탱하고 다음 사항을 꼭 확인해 주세요.
래칫 링크는 조여지는 패스너와 완전히 맞물립니다.
리액션 암이 리액션(반응) 구조에 단단히 맞닿습니다.
호스 및 커플링은 자유롭게 움직이므로 주변 구조물이 없어야 합니다.
공구가 수축될 때는 사용자가 공구의 무게를 반드시 지탱해야 한다는 것에 유의하십시오. 특히 공구를 반전된 방향으로 사용하는 작업에서는 더욱 그렇습니다. 지원되지 않는 공구는 작업 중 떨어질 수 있으므로 매우 위험합니다.
드라이브가 회전하도록 진행 버튼[1]을 길게 눌러주세요.
피스톤이 스트로크의 끝에 도달하면 다음과 같은 상황이 발생합니다.
리액션 폴(pawl)이 반응하면 딸깍 소리가 납니다.
래칫 링크가 회전을 멈춥니다.
압력이 설정된 압력 값까지 상승합니다.
이는 볼트가 올바르게 조여졌다는 뜻이 아니라 공구가 최대 스트로크에 도달하였다는 의미일 뿐입니다.
공구가 최대 스트로크에 도달하면 공구를 지탱하고 리모컨 펜던트의 진행 버튼[1]을 놓아주세요. 공구가 자동으로 수축됩니다. 공구가 완전히 수축되면 드라이브 폴(pawl)에서 딸깍 소리가 납니다.
이제 공구가 다시 진행할 준비가 되었습니다. 압력이 목표 값에 직접 도달하고 패스너의 움직임이 관찰되지 않을 때까지 3~5단계를 반복합니다. 렌치가 멈추고 패스너가 올바르게 조여집니다.
공구가 정지한 후, 진행 버튼[1]을 한 번 더 눌러 패스너가 움직이지 않는지 꼭 확인해 주세요. 그렇지 않은 경우 조임 프로세스가 완료된 것입니다.
경우에 따라 공구가 작업 중 자체적으로 잠길 수 있습니다. 공구를 분리하려면, 다음 절차를 수행하세요.
진행 버튼[1]을 길게 누릅니다.
압력이 목표 값에 도달하면 폴(pawl) 레버를 손으로 눌러 래칫에서 폴을 분리합니다.
리모컨 팬던트의 진행 버튼을 놓기 전에 공구의 무게를 지탱해야 합니다.
작업 대상에서 공구를 분리합니다.
폴 레버를 손으로 옮깁니다. 레버를 움직일 때 공구를 사용하지 마십시오.
리모컨 펜던트의 정지 버튼[0]을 눌렀다 놓아 펌프를 정지합니다.