Etapas de apriete
Este apartado enumera las etapas de apriete disponibles.
Parámetros generales
Nombre
Se puede asignar un nombre distinto a cada etapa, en caso necesario.
Dirección de giro
Cada una de las etapas de apriete puede girar marcha adelante, es decir, para apretar, o marcha atrás, es decir, para aflojar ligeramente el tornillo. Las flechas indican esta dirección. Muchas de las etapas de apriete tienen una dirección con codificación fija hacia adelante, por ejemplo Apretar hasta el ángulo o Apretar hasta el par. Las etapas como Aflojar hasta el ángulo o Aflojar hasta el par tienen la dirección establecida automáticamente en marcha atrás.
El ajuste de desapriete no está permitido para las herramientas configuradas con el accesorio delantero de engranaje (GFA) de boca abierta. La dirección de apriete del programa de apriete debe ser la misma que la dirección de apriete de la herramienta de boca abierta para que se permita ejecutar un apriete. Es posible asignar un programa de desapriete a un programa de apriete para una herramienta de boca abierta, pero si el interruptor de dirección está configurado para ejecutar el programa de desapriete, la herramienta se bloqueará.
Categoría de la etapa
Para cada etapa, existe la opción de elegir categoría de etapa. Al seleccionar la categoría de etapa, los aprietes que no sean correctos (NOK) figurarán en una lista en la vista de resultados del evento con un estado relacionado detallado junto con la información correspondiente del error. Si no se realiza ninguna selección, el estado detallado se establecerá en «error de múltiples etapas sin categorizar». El estado detallado relacionado se puede personalizar.
Ventana de ángulo
Una junta se considera dura si el tornillo se aprieta hasta su par completo y gira 30 grados o menos después de apretarse hasta su punto de asentamiento. Una junta blanda gira 720 grados o más después de apretarse hasta su punto de asentamiento. El parámetro de dureza define la ventana del ángulo para calcular la gradiente. Cuanto más dura sea la junta, más pequeña es la ventana del ángulo.
Rampa de velocidad/aceleración (solo disponible en Tools Talk 2)
Para la mayoría de etapas se puede especificar cómo debe hacerse la aceleración hasta la velocidad objetivo. Se pueden realizar tres ajustes distintos: duro, blando y manual. La aceleración definida se empleará cuando se inicie una etapa. Independientemente de si la herramienta ya está funcionando con velocidad al principio de la etapa, la rampa se empleará para acelerar la velocidad objetivo de la etapa. Este proceso es el caso incluso si la velocidad al inicio de la etapa es mayor o menor que la velocidad objetivo.
Rampa de velocidad - Modo duro y blando:
Aceleración | Rampa de velocidad utilizada |
|---|---|
Dura | 2000 rpm/s (una rampa de velocidad entre 1000 y 10000 rpm/s es una aceleración dura). |
Blanda | 500 rpm/s (una rampa de velocidad entre 200 y 1000 rpm/s es una aceleración blanda). |
Rampa de velocidad - Modo manual:
Parámetro | Valor predeterminado | Límite mínimo | Límite máximo |
|---|---|---|---|
Velocidad | 60 rpm | Debe ser > 0 | Debe ser <= Velocidad máxima de la herramienta |
Aceleración | 500 rpm/s | Debe ser > 0 | Debe ser <= Aceleración máxima de la herramienta |
Usando cambios de velocidad
Puede definir 1-5 activaciones de ángulo o e par durante una etapa, donde cambiará la velocidad.
Los cambios de velocidad se pueden añadir en el campo Configuración.
En una etapa, todas las activaciones de cambio de velocidad se basan en la misma propiedad (par o ángulo). No pueden mezclarse en una etapa.
Para añadir un cambio de velocidad:
En el cuadro de diálogo de una etapa que pueda tener cambios de velocidad, seleccione Añadir cambio de velocidad. A continuación, seleccione un intervalo de ángulo y un intervalo de par.
Se abren los campos de par/ángulo de cambio de velocidad.Añada los valores en función de la siguiente tabla:
Parámetro
Descripción
Activación de ángulo/par
Debe ser > 0
Velocidad
Debe ser > 0
Tipo de rampa de velocidad
Duro o suave
Los gatillos de par y de ángulo deben ser inferiores al objetivo de la etapa, dependiendo del tipo de etapa y del tipo de gatillo.
El gatillo de par y la velocidad de par también se validan con el par máximo y la velocidad máxima de la herramienta.
Una advertencia o indicador de error se produce cuando los ajustes de cambio de velocidad exceden los valores máximos de la herramienta o de la etapa.
Controlar el comportamiento de frenado (parada ergo/inercia)
El comportamiento de frenado de un programa de apriete multietapa se puede controlar en dos lugares posibles en el programa: en una etapa anterior una inversión de la dirección del apriete, o en la etapa final del programa de apriete. En otros lugares del programa multietapa, los parámetros de frenado no estarán disponibles en los ajustes generales de la etapa. Se puede ajustar el frenado a Parada ergo o Inercia. Inercia frenará completamente la herramienta, mientras que Parada ergo permitirá una desaceleración más ergonómica del apriete.
Para ajustar el tipo de frenado, vaya a los ajustes de la etapa y cambie al menú desplegable Configuración de freno a Parada ergo o Inercia. Inercia no tiene parámetros adicionales.
Parámetros de parada ergo
Parámetro | Descripción |
|---|---|
Freno adaptador | Ajuste el freno adaptador a Activado o Desactivado |
Tiempo de rampa | Solo disponible cuando el freno adaptador está desactivado. Inserte el tiempo en ms. |
Lista de etapas individuales
Las siguientes etapas de apriete no son compatibles con las herramientas configuradas con el accesorio delantero de engranaje (GFA) de boca abierta:
A: aflojar hasta ángulo
TrR: aflojar hasta liberar el gatillo
T: aflojar hasta par
E: accionar
SR: liberar boca
DT: apretar hasta DynaTork
TP - TensorPulse
C: embrague
Esta etapa operará la herramienta con la velocidad programada en la dirección hacia adelante hasta que se libere el embrague. Cuando la herramienta ha informado de la liberación del embrague, la etapa finalizará con el estado OK.
Un programa de apriete que utilice la etapa de embrague no puede tener otra etapa asignada.
Esta etapa solo es válida para las herramientas de embrague BCV-RE y BCP-RE.
Parámetro | Descripción |
|---|---|
Control de velocidad | Una velocidad o dos velocidades |
Velocidad final | Ajusta la velocidad final del programa [rpm] |
Rampa de velocidad | Interruptor donde se puede seleccionar la rampa de velocidad [dura, suave] |
Reapriete | Detección de reapriete configurada en Activado o Apagado |
Ángulo de reapriete | Ajusta el ángulo de reapriete [º] |
CL - Afloje del embrague
Esta etapa operará la herramienta con la velocidad programada en la dirección hacia detrás hasta que se libere el gatillo de la herramienta.
Un programa de afloje que utilice la etapa de embrague no puede tener otra etapa asignada.
Esta etapa solo es válida para las herramientas de embrague BCV-RE y BCP-RE.
Parámetro | Descripción |
|---|---|
Final | Ajusta la velocidad final del programa [rpm] |
W - Esperar
En esta etapa la herramienta espera hasta que se haya cumplido la condición Tipo de espera. La herramienta no gira mientras espera, pero se puede especificar Condición de retención.
Parámetro | Descripción |
|---|---|
Tipo de espera |
|
Tiempo de espera | Número de segundos que la herramienta permanecerá quieta - válido solo cuando se selecciona Tiempo para Tipo de espera. |
Condición de retención |
|
SR: liberar boca
Esta etapa opera la herramienta con la velocidad n hacia atrás hasta que se alcanza el ángulo objetivo. El ángulo objetivo se mide desde el inicio de la etapa.
Solo se puede emplear esta etapa como última etapa en la ruta de apriete de un programa de apriete de múltiples etapas. Sin embargo, es posible añadir un punto de sincronización después de este paso.
Parámetro | Descripción |
|---|---|
Ángulo objetivo | El objetivo de ángulo Predeterminado: 3 grados, debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Velocidad | Predeterminado: 60 rpm. |
DI – Ejecutar hasta entrada digital
Esta etapa ejecuta la herramienta en la dirección definida por el parámetro Dirección, hasta que la entrada especificada por Entrada digital se vuelve alta o baja dependiendo del valor de Condición de parada.
Esta etapa no está disponible para las herramientas STB.
Parámetro | Descripción |
|---|---|
Dirección | Hacia adelante o hacia atrás |
Entrada digital | Se puede seleccionar una de las siguientes entradas digitales locales en el controlador:
|
Freno (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
Condición de parada |
|
Velocidad (rpm) | Predeterminado: 60 rpm. |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Disponible si Tipo de rampa de velocidad es Manual. Predeterminado: 500 rpm/s. |
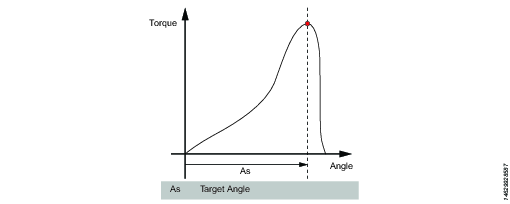
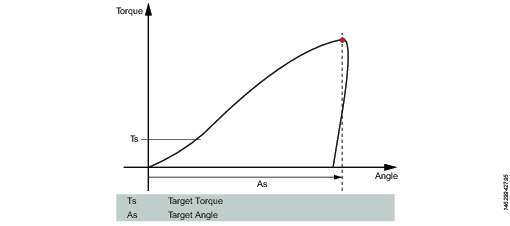
A – Apretar hasta ángulo / Aflojar hasta ángulo
A – Apretar hasta ángulo
Esta etapa opera la herramienta hasta que se alcanza el ángulo objetivo. El ángulo objetivo se mide desde el inicio de la etapa.
A – Aflojar hasta ángulo
Esta etapa opera la herramienta con la velocidad n hacia atrás hasta que se alcanza el ángulo objetivo. El ángulo objetivo se mide desde el inicio de la etapa.
Parámetros
Parámetro | Descripción |
|---|---|
Ángulo objetivo | El objetivo de ángulo Debe ser > 0 |
Velocidad | Predeterminado: 60 rpm. |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Freno (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
TrR – Aflojar hasta liberar el gatillo
Esta etapa no está disponible para Power Focus 6000 StepSync, Power Focus 8 StepSync, Flex.
Esta etapa se ejecuta en dirección hacia atrás hasta que se libera el gatillo de la herramienta (aflojar). Solo se puede utilizar como última etapa en un programa.
Para las herramientas STB, esta etapa solo es aplicable para programas de afloje.
Parámetro | Descripción |
|---|---|
Velocidad | Valor numérico para la velocidad de rotación, en rpm. |
Tipo de rampa de velocidad | Lista de opciones donde se puede seleccionar la rampa de velocidad [dura, suave, manual] |
TTTR – Apretar hasta liberar el gatillo
Esta etapa opera hasta que se libera el gatillo de la herramienta (apretar). Solo se puede utilizar como última etapa en un programa de apriete.
Parámetro | Descripción |
|---|---|
Velocidad | Valor numérico para la velocidad de rotación, en rpm. |
Tipo de rampa de velocidad | Lista de opciones donde se puede seleccionar la rampa de velocidad [dura, suave, manual] |
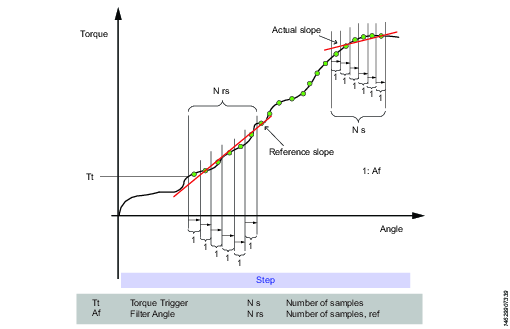
Apretar hasta límite elástico, método 2 (YM2)
Esta etapa opera la herramienta con la velocidad especificada en la dirección hacia adelante hasta que se detecta el límite elástico.
La búsqueda del límite elástico se inicia cuando se ha alcanzado el par Tt. Se calcula la media del par en Af grados. Este procedimiento se repite N rs veces.
Se calcula una pendiente de referencia con regresión lineal en los puntos N rs. Tras esto, se calculan continuamente los valores medios nuevos en A f grados.
La pendiente actual se calcula con regresión lineal sobre los últimos puntos medios N s . El límite elástico se alcanza cuando la pendiente es inferior al Py % de la pendiente de referencia.
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Filtrar ángulo | Predeterminado: 1. Debe ser > 0 |
Número de muestras | Predeterminado: 6. Debe ser > = 4 |
Número de muestras, ref. | Predeterminado: 6. Debe ser > = 4 |
Porcentaje de límite elástico | Predeterminado: 90%. Debe ser >20%. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Freno (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
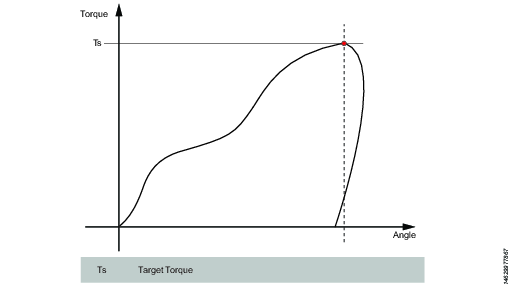
T - Apretar hasta par / Aflojar hasta par
T - Apretar hasta par
Esta etapa opera la herramienta con la velocidad programada en la dirección hacia adelante hasta que se alcanza el par objetivo.
Parámetro | Descripción |
|---|---|
Par objetivo | El objetivo de par Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Freno (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
T – Aflojar hasta par
Esta etapa opera la herramienta con la velocidad n hacia atrás. Para que se active la etapa, el par debe exceder primero el 110 % del par objetivo. El par objetivo debe tener un valor positivo. Después de alcanzar el par objetivo, se ejecutará el paso hasta que el par caiga por debajo del par objetivo.
Parámetro | Descripción |
|---|---|
Par objetivo | El objetivo de par Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Freno (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
T+A – Apretar hasta par más ángulo
Esta etapa opera la herramienta hasta que se alcanza el ángulo objetivo. Desde este punto continúa operando un ángulo objetivo adicional.
Parámetro | Descripción |
|---|---|
Par objetivo | El objetivo de par Debe ser > 0 |
Ángulo objetivo | El objetivo de ángulo Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Velocidad | Predeterminado: 60 rpm. |
Freno (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
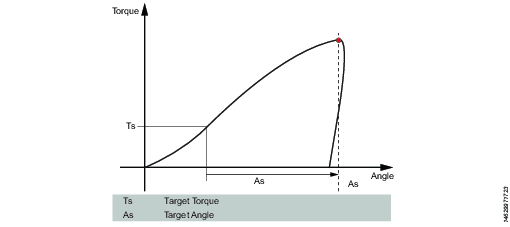
T|A – Apretar hasta par o ángulo
Esta etapa ejecuta la herramienta a la velocidad n en la dirección hacia adelante hasta que se alcanza el par objetivo o el ángulo objetivo. Las mediciones de par y ángulo empiezan al comienzo del paso.
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Ángulo objetivo | Debe ser > 0 |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Freno (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
T&A – Apretar hasta par y ángulo
La herramienta funciona a la velocidad especificada en la dirección hacia adelante hasta que se alcanza tanto par objetivo como ángulo objetivo. El par objetivo y el ángulo objetivo deben ser > 0.
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Ángulo objetivo | Predeterminado: 0. Debe ser > 0 |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Freno (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
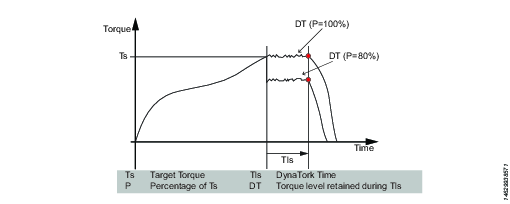
DT – Apretar hasta DynaTork
Esta etapa opera la herramienta con la velocidad n en la dirección hacia adelante hasta que se alcanza el Ángulo objetivo. La herramienta mantendrá entonces la constante en el Porcentaje DynaTork del Par objetivo durante el Tiempo DynaTork.
Para evitar un sobrecalentamiento de la herramienta, se recomienda encarecidamente no operar DynaTork por encima del 40 % del par máximo de la herramienta.
Parámetro | Descripción |
|---|---|
Par objetivo | El objetivo de par Debe ser > 0 |
Tiempo de DynaTork | El tiempo de DynaTork estará activo. |
Porcentaje de DynaTork | El porcentaje del Par objetivo. |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Velocidad (rpm) | Predeterminado: 60 rpm. |
Freno (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
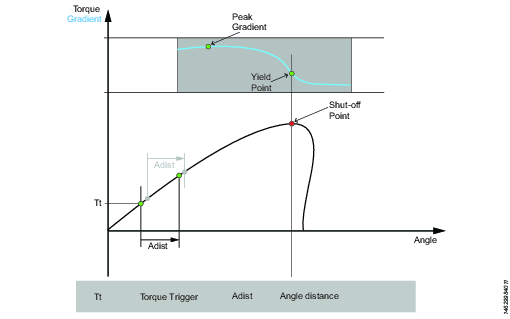
Y – Apretar hasta límite elástico
Esta etapa no está disponible para las herramientas STB.
Esta estrategia opera la herramienta con la velocidad en la dirección hacia adelante hasta que se detecta el límite elástico. El límite elástico se encuentra monitorizando la gradiente desde el punto en el que el par supera el nivel del Par del gatillo, calculado según las mediciones de distancia del par y el ángulo. El parámetro de distancia del ángulo se establece según la dureza especificada de la junta.
Establecer la Ventana del ángulo de gradiente (para una junta dura, una junta blanda o para establecer manualmente la ventana del ángulo). Si se selecciona Manual, debe establecerse la Ventana del ángulo. Una junta se considera dura si el tornillo se aprieta hasta su par completo y gira 30 grados o menos después de apretarse hasta su punto de asentamiento. Una junta blanda gira 720 grados o más después de apretarse hasta su punto de asentamiento. El parámetro de dureza define la ventana del ángulo para calcular la gradiente. Cuanto más dura sea la junta, más pequeña es la ventana del ángulo.
Parámetro | Descripción |
|---|---|
Ventana de ángulo de gradiente | Especifica Ventana de ángulo:
|
Ventana de ángulo | Disponible cuando Ventana de ángulo de gradiente se establece en Manual. Debe ser > 0 e <= 100. |
Par del gatillo | La medición del ángulo comienza en este punto de activación. Debe ser >= 0 e < Par máx. de herramienta. |
Amortiguación | Frecuencia con la que se calcula el gradiente. Debe ser > 0 e < 100 e < Ventana de ángulo. |
Porcentaje de límite elástico | Debe ser >=20 % |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Tipo de filtro de par | El tipo de filtro:
|
Frecuencia de corte | Es necesario especificarla cuando se configura Tipo de filtro de par como Pase bajo:
|
Número de muestras | Es necesario especificarla cuando se configura Tipo de filtro de par como Media móvil:
|
Freno (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
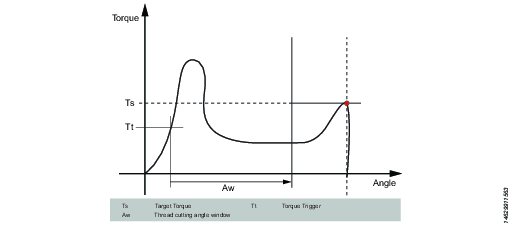
ThCT – Corte de rosca hasta par
La función Corte de rosca hasta par activa el apriete en el que el par de aproximación requerido es superior al par de Aproximación completa, por ejemplo cuando se aprietan capas finas de metal utilizando tornillos taladradores (o autorroscantes). La herramienta opera hacia adelante hasta que se alcanza el Ángulo de corte de rosca (Aw). La ventana del ángulo de corte de rosca se mide desde que el par supera por primera vez el Par de gatillo de corte de rosca (Ttc). Desde el punto en que se alcanza el ángulo de corte de rosca, la etapa continúa hasta que se alcanza el Par objetivo (Tt).
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Ventana de ángulo de corte de rosca | Predeterminado: 0. Debe ser > 0 |
Par del gatillo | La medición del ángulo comienza en este punto de activación. |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Freno (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
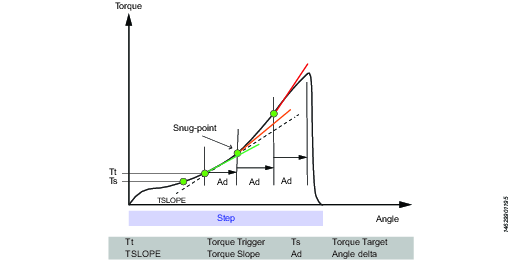
RD – Aproximación
Esta etapa no está disponible para las herramientas STB.
La etapa de aproximación forma parte del apriete desde que el tornillo entra en la rosca hasta justo antes de que la cabeza del tornillo toque la superficie subyacente y se alcance el punto de asentamiento. El par necesario durante la aproximación no contribuye a ninguna fuerza de amarre.
Esta etapa hace funcionar la herramienta con la velocidad en dirección de avance y, dependiendo del Tipo de aproximación, par o asentamiento, la conducta de la etapa es la que sigue:
Tipo de aproximación: Hasta par: La etapa se detiene cuando se encuentra el par objetivo especificado.
Tipo de aproximación: Hasta asentamiento: El cálculo de la gradiente de ajuste empieza en el nivel de gatillo de par especificado Tt. Si no se establece la activación por par, se inicia el cálculo de la gradiente al comenzar la etapa.
El cálculo de la pendiente se realiza entre dos puntos de ángulo con separación de Ad grados y se calcula de la forma siguiente: (Tn – Tn-1)/(An – An-1) y en cuanto las dos pendientes consecutivas son superiores a TSLOPE se encuentra el punto de asentamiento.
Parámetro | Descripción |
|---|---|
Tipo de aproximación | Hasta par o Hasta asentamiento. |
Par objetivo | Predeterminado: «No config.» Debe ser > 0 |
Velocidad | Predeterminado: 60 rpm. Debe ser > 0 |
Tipo de rampa de velocidad | Duro, suave o manual. Predeterminado: Duro. Si selecciona Manual, se abre el campo de la rampa de velocidad. |
Rampa de velocidad | Si el tipo de rampa de velocidad es Manual, se abre el campo. Predeterminado: 500 rpm/s. |
Par del gatillo | Si Tipo de aproximación es Hasta asentamiento, aparece el campo Par de gatillo. Predeterminado: «No config.» Debe ser > 0 |
Ángulo delta | Si Tipo de aproximación es Hasta asentamiento, aparece el campo Ángulo delta. Predeterminado: "0". Debe ser > 0 |
Tasa de par | Si Tipo de aproximación es Hasta asentamiento, aparece el campo Régimen de par. Predeterminado: "0". Debe ser > 0 |
Freno (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
E: accionar
Esta etapa no está disponible para las herramientas STB.
Esta etapa opera la herramienta en ambas direcciones hasta que la boca envuelve el tornillo. La etapa continúa hasta que se alcanza el Par objetivo o Ángulo objetivo, siempre que se haya establecido la opción Continuar si no se acopla en Sí. Si se alcanza el ángulo objetivo en cualquiera de las direcciones, ésta se invertirá. Limitar las iteraciones de búsqueda introduciendo el Máx. de intentos de acople. Si se alcanza el par objetivo en cualquiera de las direcciones, finalizará la etapa con el estado OK.
Ext - Resultado externo
El resultado externo es una estrategia que se emplea cuando se indica un apriete correcto (OK) con una señal digital externa (y no con valores de par o ángulo medidos durante el apriete). Esta señal externa se puede facilitar a través de cualquier medio que pueda transmitir una señal digital al controlador (p. ej., a través del bus E/S).
Cuando se envía la señal, la vista de resultados (datos registrados) mostrará el valor del parámetro objetivo que figura en el programa de apriete (valor de par especificado, valor de ángulo o cadena de texto). Estos valores (par y ángulo) no representan los valores medidos reales, sino solo el texto introducido.
Parámetro | Descripción |
|---|---|
Par <Par objetivo> | Valor numérico del valor de par objetivo mostrado deseado. Una señal podría proceder por ejemplo de una llave de clic y mostrar <Par objetivo>. |
Ángulo <Ángulo objetivo> | Valor numérico del valor de ángulo objetivo mostrado deseado. Una señal podría proceder por ejemplo de una llave de clic y mostrar <Ángulo objetivo>. |
Texto | Una cadena alfanumérica del texto mostrado deseado. Por ejemplo: «Se ha cambiado el aceite». |
TC – Calibración de par
La etapa Calibración de par no es compatible con Power Focus XC.
Esta etapa solo es compatible con herramientas con transductor dual.
La etapa Calibración de par opera la herramienta con la velocidad especificada en la dirección hacia adelante hasta que se alcanza el objetivo de par.
Parámetro | Descripción |
|---|---|
Par objetivo | Debe ser > 0 |
Velocidad | Debe ser > 0 Predeterminado: 60 rpm. |
Transductor | Principal o Secundario. Predeterminado: Principal. Configurado como Secundario para calibrar el transductor frontal. |
Freno adaptador (válido solo para Power Focus 6000 StepSync, Power Focus 8 StepSync y Flex) | Si está Activado, la herramienta se detendrá al alcanzar el objetivo. Si está Desactivado, el programa pasa directamente a la siguiente etapa sin detener la herramienta. |
MWR - Llave mecatrónica
La llave mecatrónica es una etapa especializada que se puede utilizar solo combinada con la llave mecatrónica (MWR).
Esta etapa no se puede utilizar combinada con otras etapas. No se pueden utilizar restricciones con esta etapa. De forma predeterminada, la etapa cuenta con tres supervisiones: par pico, ángulo y clic.
Parámetro | Descripción |
|---|---|
Límite de afloje | Valor numérico para par negativo (es decir, par en la dirección de afloje) en cuyo punto el resultado de apriete se marca como NOK (dirección equivocada de apriete (aflojar)); en Nm. |
Tamaño de la herramienta | Valor numérico para la longitud específica de la herramienta de terminal instalada en el MWR-TA; en mm. |
Curvatura de herramienta | Valor numérico para la herramienta de terminal instalada en el MWR-TA; en º/Nm. |
Ventana de ángulo de reapriete | Valor numérico para el ángulo para determinar si el tornillo ya estaba apretado si el par se alcanza, en º. |
Velocidad angular máx. | Valor numérico para la velocidad máx. a la cual se puede apretar el tornillo, en º/s. |
WP - Producción de llave
Estrategia utilizada para la prueba de calidad del apriete realizado con la STwrench.
Parámetro | Descripción |
|---|---|
Estrategia de control | El tipo de etapa Producción de llave se puede configurar con las estrategias de control siguientes.
|
En base a la estrategia de control seleccionada, aparecerá una combinación de algunos de los parámetros abajo enumerados.
Parámetros | Descripción |
|---|---|
Par objetivo | Define el par objetivo para la etapa de apriete. |
Medir par a | Especifica donde se medirá el par. Escoja entre Par de pico o Ángulo de pico.
|
Límite de búsqueda de ángulo | Es una compensación que se utiliza para definir el valor de resultado de par para un apriete. Medir par en se debe configurar como Ángulo de pico para que este parámetro esté disponible. |
Tiempo de trinquete | Valor numérico para el tiempo de trinquete que es 5000 ms de forma predeterminada. Esto permite al operario liberar el par durante un momento y recargar durante la operación de apriete. Si se supera el Tiempo de trinquete, el resultado del apriete se marca como NOK con la razón «Tiempo límite superado de apriete». |
Tiempo de final de ciclo | Valor numérico en ms para indicar el final del tiempo de ciclo. Se aplica cuando el par cae por debajo de la aproximación completa |
Coeficiente de corrección de par | El parámetro se utiliza para corregir la lectura de par cuando se utiliza una extensión o un multiplicador de par en la llave. El valor predeterminado es 1. |
Corrección de ángulo | El parámetro se utiliza para corregir la lectura de ángulo cuando se utiliza una extensión o un multiplicador de par en la llave. El valor predeterminado es 0. |
Ángulo objetivo | Define el ángulo objetivo para la etapa de apriete. |
Detección de reapriete | Activado o Desactivado. La detección de reapriete se puede utilizar para determinar si un apriete es un reapriete en base al ajuste de límite de ángulo. Límite de ángulo para reapriete está activado si se configura Dirección de reapriete como Activado. |
Coeficiente de pendiente lineal | El coeficiente de pendiente lineal caracteriza la rigidez de la junta en la parte lineal de la curva, como pendiente de par/ángulo con la unidad de medida Nm/Grado. |
Compensar valor | Escoja entre Par medio o Par de pico. El valor de compensación especifica cómo se calculará el PVT. Par medio - El PVT se basará en una media calculada utilizando los elementos siguientes:
Par de pico - El PVT se basará en el valor de pico medido antes de detectar el asentamiento. |
Monitorización de retardo | El cálculo del PVT no se iniciará antes de que haya pasado esta ventana, empieza con el inicio de apriete. |
Intervalo PVT | Define para cuántos grados se deben calcular la ventana PVT, empezando desde el punto de distancia PVT. |
Distancia PVT | Define a cuántos grados antes del asentamiento el sistema debe iniciar la ventana PVT. |
Par mín. prevalente | Límite mínimo de par de autofrenado. |
Par máx. prevalente | Límite máximo de par de autofrenado. |
WQ - Calidad de llave
Estrategia empleada para la comprobación de calidad de los aprietes con la STwrench.
Parámetro | Descripción |
|---|---|
Estrategia de control | La estrategia Calidad de llave se puede configurar con las estrategias de control siguientes.
|
En base a la estrategia de control seleccionada, aparecerá una combinación de algunos de los parámetros abajo enumerados.
Parámetros | Descripción |
|---|---|
Tiempo de trinquete | Valor numérico para el tiempo de trinquete que es 5000 ms de forma predeterminada. Esto permite al operario liberar el par durante un momento y recargar durante la operación de apriete. Si se supera el Tiempo de trinquete, el resultado del apriete se marca como NOK con la razón «Tiempo límite superado de apriete». |
Coeficiente de corrección de par | El parámetro se utiliza para corregir la lectura de par cuando se utiliza una extensión o un multiplicador de par en la llave. El valor predeterminado es 1. |
Corrección de ángulo | El parámetro se utiliza para corregir la lectura de ángulo cuando se utiliza una extensión o un multiplicador de par en la llave. El valor predeterminado es 0. |
Ángulo objetivo | Define el ángulo objetivo para la etapa de apriete. |
Detección de reapriete | Activado o Desactivado. La detección de reapriete se puede utilizar para determinar si un apriete es un reapriete en base al ajuste de límite de ángulo. Límite de ángulo para reapriete está activado si se configura Dirección de reapriete como Activado. |
Coeficiente de pendiente lineal | El coeficiente de pendiente lineal caracteriza la rigidez de la junta en la parte lineal de la curva, como pendiente de par/ángulo con la unidad de medida Nm/Grado. |
TP - TensorPulse
Antes de utilizar la etapa de apriete TensorPulse, es obligatorio haber instalado el siguiente tipo de licencia en el controlador:
Estrategias de Baja Reacción
TensorPulse solo es válido para las herramientas siguientes: ETV-STR61-100-13, ETV-STR61-70-13, ETV-STR61-50-10.
Esta etapa genera impulsos de apriete en la dirección hacia adelante hasta que se alcanza el objetivo de par.
Si ejecuta la etapa de apriete TensorPulse, utilice el adaptador/la boca PulseDrive necesario.
Si la etapa de apriete TensorPulse se ejecuta sin el adaptador PulseDrive, todos los aprietes son NOK. El error de etapa «Adaptador PulseDrive no detectado» aparece cuando no hay adaptador PulseDrive.
Parámetro | Descripción |
|---|---|
Objetivo de par: Ts | El intervalo de par debe ir de 0 hasta el par máximo de la herramienta. |
Energía de impulso: Pe | La energía de impulso se utiliza para controlar la cantidad de energía/corriente en cada impulso. El rango de Energía de impulso debe ir del 10 % al 100 %. |
Factor de ajuste de fuerza de reacción | Se utiliza para ajustar la fuerza de reacción al ejecutar la etapa TensorPulse. Es la potencia que mueve la herramienta en el sentido opuesto tras cada impulso. Su rango debe estar entre 0 y 100 %. |
En la trayectoria, la inversión del ángulo significa que la herramienta gira hacia atrás para activar los impulsos, pero el cabezal del tornillo no gira hacia atrás necesariamente a causa del adaptador PulseDrive.









































