はじめに
このセクションでは、製品に関する基本的な情報と、トピックで使用されている書式設定規則について説明します。
製品基本情報
コントローラプログラミングの次世代ソフトウェア、ToolsTalk 2 はお客様の生産ライン管理を新たなレベルに引き上げます。クライアント-サーバベースのソフトウェアにより、すべての生産ライン構造の可視化とトレーサビリティを実現し、迅速で簡単に設定を行うことができます。最先端のユーザ体験に基づいて設計されており、ユニークな機能を幅広く備えています。お客様のニーズに応じて様々な作業を遂行できるようにデザインされています。標準搭載の機能管理システム(Functionality Management System:FMS)を通じて、各工程のコントローラに必要な機能をいつでも追加することが出来ます。お客様仕様にカスタマイズ可能なユーザ権限機能により、複雑な製造システム内での品質管理や生産における稼働率向上を可能にします。
機能
PowerFocus6000、PF6フレックスシステム、周辺機器、マルチステップ、フィールドバス、ソフトPLC のマスター設定
締付波形分析と出力
生産ライン構成の管理
アクティブディレクトリとユーザ管理
機能管理システム(FMS)を搭載
過去の履歴すべてを含む締付プログラムのライブラリ
オフラインおよびグローバルなプログラミング
ソフトウェア上での生産ライン可視化と管理
製品の利点
ユーザフレンドリーなレイアウト及び簡単操作によりソフトウェアの習得時間を短縮
グローバル(共通)プログラムおよび異常通知による不具合の低減
素早く生産ライン構成を変更し、新製品の導入に効率的に対応
プログラム変更の可視化とトレーサビリティにより、生産性を向上
リアルタイムの結果分析とライン単位でのソフトウェア管理により稼働効率を向上
お客様仕様にカスタマイズ可能なユーザ権限機能により、生産ライン管理を徹底
一般データ保護規則(GDPR)
この製品は、システムユーザー名、役割、IP アドレスなど、個人を特定できる情報を処理する機能を提供します。この処理機能の目的は、追跡可能性と正しいアクセス管理を通して品質管理を強化する可能性にあります。
ユーザーが個人データを処理する場合は、EU内での GDPR、その他の適用可能な法律、指令と規制などの遵守を含み、関連個人データ保護法を認識し、準拠する必要があります。Atlas Copco では、ユーザーによる製品の使用に一切の責任を負いません。
責任と警告
責任
動作環境における多くの事象が締め付けプロセスに影響を与える可能性があり、結果の検証が必要となります。適用規格および/または規制に準拠して、当社は、ここで、締め付け結果に影響を与える可能性のある事象があった場合に、導入したトルクおよび回転方向を確認いただくよう要請します。このような事象の例として、以下のものがありますが、これらに限定されるものではありません。
ツーリングシステムの初めての設置
部品バッチ、ボルト、ネジバッチ、ツール、ソフトウェア、構成または環境の変更
空気接続または電気接続の変更
ライン人間工学、プロセス、品質手順または慣行の変更
オペレーターの変更
締め付けプロセスの結果に影響を与えるその他の変更
以下について確認する必要があります。
影響のある事象によりジョイントの条件が変更されていないこと。
初めての機器の設置、メンテナンスまたは修理後に完了していること。
少なくともシフト毎に一回、または他の適切な頻度に行うこと。
改訂履歴
文書の改訂 | ToolsTalk 2 ソフトウェアの改訂 | 変更 |
|---|---|---|
12.0 | 2.14 |
|
11.0 | 2.13.4 |
|
10.0 | 2.13 |
|
9.0 | 2.12 |
|
8.0 | 2.11 | 該当せず |
7.0 | 2.9 | 該当せず |
6.0 | 2.8 | 該当せず |
5.1 | 2.7.1 | 該当せず |
5.0 | 2.7 | 該当せず |
4.0 | 2.6 | 該当せず |
3.0 | 2.5 | 該当せず |
2.0 | 2.4 | 該当せず |
1.0 | 2.3 | 初版 |
システム概要
製造システムは、図の機能ブロックで構成することができます。
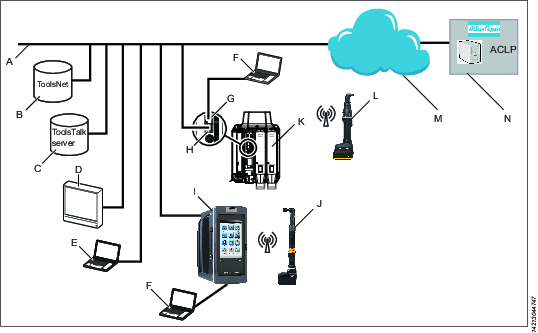
A | 工場ネットワーク。 | H | コントローラー 工場ポート: 工場ネットワークに接続されています。 |
B | ToolsNet サーバー: 締付けの結果の保管と統計分析用。 | I | Power Focus 6000 コントローラー: 手持ち工具に使用します。 |
C | ToolsTalk 2 サーバー: コントローラーおよびIXBツールの構成とパラメーター設定用。 | J | ハンドヘルド バッテリー ツール コントローラーとのワイヤレス接続を使用します。 |
D | 工業用 PC (IPC): ToolsTalk 2 および ToolsNet サーバー用クライアント端末として使用できます。 | K | PF6 Flex コントローラー: 固定工具と共に使用します。 |
E | 工場ネットワークに接続されたポータブル コンピューター ToolsTalk 2 および ToolsNet サーバー用クライアント端末として使用できます。 | L | IXB ハンドヘルド バッテリー ツール 工場ネットワークとのワイヤレス接続を使用します。 |
F | サービス コンピューター: コントローラーまたはIXBツールのサービスポートに接続できます。 | M | インターネットクラウド。 |
G | コントローラー サービスポート サービス コンピューターの接続にも使用できます。 | N | Atlas Copco Licensing Portal (ACLP):Atlas Copco にあり、Functional Management System (FMS) のライセンスされた機能へのサポートを提供します。 |
ソフトウェア構造
アイコン | 説明 |
|---|---|
 | ToolsTalk 2 のシステムユーザー管理者。言語、温度、トルク単位を選択します。 |
 | ヘルプアイコンは次を示します。
|
 | プラント構造 プラント構造ワークスペースには、個別のコントローラが選択されています。ワークスペースは複数のアイコンに分割されています。各アイコンの下にあるメニューはデータとパラメータ設定の構成に使用されます。 アイコンはコントローラインターフェースと Web インターフェースとでは異なりますが、インターフェースはそれぞれで作成できるパーティションと構成で同様です。 |
 | 締め付けプログラム これを選択すると、ワークスペースに既存の締め付けプログラムのリストが表示されます。各プログラムを選択すると、選択した締め付けプログラムのパラメータの構成と設定のための異なるメニューが開きます。 |
 | バッチシーケンス これを選択すると、ワークスペースに既存のバッチシーケンスのリストが表示されます。各バッチシーケンスを選択すると、選択したバッチシーケンスのパラメータの構成と設定のために異なるメニューが開きます。 |
 | Sync Mode このアイコンは、並列マルチステップ機能のあるコントローラのみに表示されます。 ワークスペースは、すべての同期されているマルチステップの締め付けプログラムのパラメータの構成と設定に使用されます。 |
 | 構成 選択すると、ワークスペースに既存の構成のリストが表示されます。パラメータの構成と設定のためのメニューは、次の選択したデバイスのタイプによって異なります。
|
 | ツール ワークスペースは、コントローラに接続されているツールを表示し、ツールのメンテナンスの間隔と校正データの表示と設定のために使用されます。 |
 | 仮想ステーション これを選択すると、ワークスペースに既存の仮想ステーションのリストが表示されます。各仮想ステーションを選択すると、次のパラメータの構成と設定のためのメニューが開きます。
|
 | コントローラ情報 コントローラに含まれている、コントローラのハードウェアとソフトウェアのモジュール。 |
 | フィールドバス & SoftPLC ワークスペースは、フィールドバス、非周期データ、SoftPLC設定を構成するために使用されます。 |
 | 設定
|
 | 結果 選択されているコントローラの前回の締め付け結果を表示します。結果は表形式またはグラフィカルトレース形式で表示されます。 |
 | イベント 選択されているコントローラの前回の締め付けイベントを表示します。設定 |
 | ライブラリ コントローラの中で、再使用できるライブラリテンプレートを管理するサブメニューがあります。 |
 | コントローラライブラリ コントローラ構成のライブラリ。サーバーをインストールすることなく、単一のラップトップコンピュータに ToolsTalk 2 機能を提供するステーションセットアップモードに非常に便利です。 |
 | プログラムテンプレートライブラリ このライブラリには、新しいマルチステッププログラムの作成に使用するテンプレートとして保存されているマルチステッププログラムが含まれます。マルチステッププログラムテンプレートを編集しても、そのテンプレートに基づくマルチステッププログラムには影響しません。 |
 | 締め付けプログラムのライブラリ 締め付けプログラムのライブラリ。既存の締め付けプログラムをライブラリにコピーすることができます。ライブラリの締め付けプログラムへの編集は、その締め付けプログラムに登録しているすべてのコントローラに影響します。 |
 | 構成ライブラリ 仮想ステーション、デバイス、アクセサリーの構成のライブラリ。既存の構成をライブラリにコピーすることができます。ライブラリ構成への編集は、その構成に登録しているすべてのコントローラに影響します。 |
 | フィールドバスライブラリ フィールドバス構成のライブラリ。既存のフィールドバス構成をライブラリにコピーすることができます。フィールドバス構成への編集は、そのフィールドバス構成に登録しているすべてのコントローラに影響します。 |
 | 設定ライブラリ 他のコントローラに配布できるイベント構成用のライブラリー。イベントは、ここまたは設定 |
 | システム管理 ソフトウェア更新、構成パラメータのインポート/エクスポート、タスクのスケジュール、機能管理システムの機能を含みます。 |
 | コントローラソフトウェアとデータ管理 ToolsTalk 2 サーバーからコントローラソフトウェアを管理します。 |
 | スケジュールしたエクスポートとインポート 1 つ以上のコントローラに影響する繰り返しタスクと、ToolsTalk 2 サーバーで実行される繰り返しタスクをスケジュールします。 |
 | 構成の比較 比較する構成ファイルを選択します。 |
 | ユーザーグループ 異なるユーザーグループと、フォルダ、コントローラ、構成へのユーザーグループ権限を管理します。 |
 | 機能管理システム (FMS) ToolsTalk 2 サーバーからライセンスされているコントローラ機能を管理します。 |
 | プログラムの承認 プログラムの締め付けと緩めの承認を管理します。 |
 | プッシュ プッシュインジケーターは、ToolsTalk 2 の任意のコントローラに構成が作成されると表示されます。 構成とパラメータへの変更は、プッシュ機能からコントローラにコピーされます。 |
コントローラアイコンはコントローラ GUI と Web GUI とは異なりますが、それぞれのアイコンで作成できるパーティションと構成では同様です。
構成オプション
コントローラの構成およびセットアップは次の方法で行うことが出来ます:
コントローラ GUI: タッチスクリーン式 Power Focus 6000 コントローラに該当します。コントローラはネットワークに接続されているかどうかにかかわらず構成できます。
Web GUI: PCはコントローラのサービスポートに直接接続できます。それ以外の場合で、コントローラがネットワークに接続されており、その IP アドレスがわかっている場合、ネットワーク上のどこからでもアクセスできます。アクセスできるのは同時に1台のコントローラのみです。Power Focus 6000 では、Web GUI のアイコンはコントローラ GUI のアイコンと同じです。FlexController のアイコンは多少異なります。すべてのコントローラには、それらに固有のアイコンがある場合があります。
ToolsTalk 2 GUI: コントローラが ToolsTalk 2サーバーに接続されている場合、ToolsTalk 2 クライアント(PC)は ToolsTalk 2 GUI を通じて、接続されているすべてのコントローラにアクセスできます。Power Focus 6000 コントローラおよび FlexControllers の両方にアクセスできます。GUI は PC 全画面、別のパーティション分割と別のアイコンを使用していますが、同じ機能を提供します。
Station Setup モードにおける ToolsTalk 2 GUI: サーバーのインストール不要で PC 上での ToolsTalk 2 インターフェースを提供します。PC はコントローラ サービスポートに接続されており、同時に1台のコントローラへのアクセスを提供します。
規約
ユーザーの皆様にさらにご理解いただけるように、本文書全体で特定のフォーマッティング規約を使用しています。使用される書式規則を以下に示します。
要素 | 表記 | 説明 | 出力 |
|---|---|---|---|
一般的な強調 | プログラム ワークスペース内。 | 特定のテキスト要素を目立たせる、またはハイライト表示します。 | 太字のテキスト |
グラフィカル ユーザー インターフェイス (GUI) 項目 | 機能ボタンを選択します。 | GUI の画面上にある項目に関する記載 (コマンド ボタン、アイコン名、フィールド名など)。 | 太字のテキスト |
グラフィカル ユーザー インターフェイス (GUI) パス > | 一般に、GUI の上部にあります。 | GUI 内の場所を追跡するナビゲーション補助。 | 例:コントローラ > プログラム > 編集 |
ユーザー入力 | プログラムの説明を入力します。 | ユーザーが入力する任意のテキスト。 | 太字のテキスト |
ファイル名 | エクスポートするファイル名を入力します。 | システムからエクスポートまたはインポートされたファイル。 | 太字斜体のテキスト |
変数およびパラメーターの名前 | エクスポートの名前を入力します。 | 変数名とパラメーター名 (値ではありません)。 | 斜体のテキスト |
変数およびパラメーターの値 | エクスポートの値を入力します。 | 変数とパラメーターの値。 | 太字大文字のテキスト |
システム出力 | Client.Domain.Models.ExportImportConfiguration | システムによって出力される任意のテキスト。 | 等幅のテキスト |
外部リンク | 文書または対象のコンテンツに関連する情報がある外部サイトへのリンク。これには、次のようなものがあります:
| 外部サイトへの選択可能なテキスト | |
内部ドキュメントへのリンク |
ある場合、これらのリンクはテキストの下に表示されます。 | 内部コンテンツへの選択可能なテキスト |
ライセンスレベル
ラインライセンサー、ラインコンフィギュレーター、ラインマネージャー
これら3つのバージョンはすべて、ToolsTalk 2のクライアントサーバーベースのインストールですが、機能セットはそれぞれ異なります。ラインライセンサーは、その他のいずれかのライセンスがインストールされていない場合に、ToolsTalk 2がクリーンインストールされる最小のパッケージです。ToolsTalk 2 のステータスがラインライセンサーの場合、すべてのラインマネージャーとラインコンフィギュレータ機能が表示されますが、ユーザーが含まれている機能を使用しようとするたびに警告メッセージが表示されます。
ToolsTalk 2は、ダウングレードが開始された場合、ラインマネージャーで作成されたデータのみをリンク解除または削除します。これは、たとえば、Line Configurator ライセンスにダウングレードする場合や、Line Manager ライセンスの試用期間が終了した場合などに発生します。
Station Setup
これはToolsTalk 2のバージョンで、すべてのコンポーネントがコンピュータ上にローカルに配置され、1対1の接続を提供します。ステーション セットアップは SQL Server データベース接続なしで実行され、一度に 1 つの接続されたコントローラのみを有効にする制限が組み込みまれています。Station Setupを使用するには有効なライセンスが必要です。そうでない場合、警告メッセージが表示されます。
ライセンスのないステーションセットアップには1つの仮想ステーションを含めることができ、これはライセンスサーバーに対して検証されます。
ライセンス機能
記号 | 説明 |
|---|---|
X | すべての機能。 |
X¹ | 接続、切断、再起動が有効になります。 |
X² | 変更が行われた場合は、プッシュが有効になります。 |
X³ | カスタム セクション、再起動、および右クリック機能が有効になります。 |
X⁴ | データベースメンテナンスのみが有効です。 |
X⁵ | 読み取りアクセスのみ。プログラムのエクスポートが有効です。 |
ラインライセンサー | ラインコンフィギュレーター | Station Setup ライセンス | ラインマネージャー | |
|---|---|---|---|---|
プラント構造 | ||||
右クリック - 新しいコントローラの追加 | X | X | X | X |
右クリック機能 | X¹ | X | X | X |
プログラム構成の履歴 | X | |||
締め付けプログラム | X⁵ | X | X | X |
バッチシーケンス | X⁵ | X | X | X |
ソース | X⁵ | X | X | X |
構成 | X⁵ | X | X | X |
ツール | X⁵ | X | X | X |
仮想ステーション | X⁵ | X | X | X |
コントローラ | X⁵ | X | X | X |
設定 | X⁵ | X | X | X |
フィールドバス | X² | X | X | X |
SoftPLC | X | X | X | |
結果 | X | X | X | |
イベント | X | X | X | X |
ライブラリ | ||||
締め付けプログラム | X | |||
構成 | X | |||
フィールドバス | X | |||
設定 | X | |||
プログラムテンプレート | X | |||
コントローラーの構成 | X | X | X | |
システム管理 | ||||
コントローラーソフトウェアとデータ管理 | X³ | X³ | X | |
スケジュールされたタスク | X⁴ | X⁴ | X⁴ | X |
機能管理システム (FMS) | X | X | X | X |
ユーザーグループ | X | |||
プログラムの承認 | X |
インストールとアップグレード
このセクションでは、製品の初期インストールや、バージョンを別のバージョンにアップグレードする際に役立つ情報を見つけることができます。
インストールの制限事項
互換性マトリックス
特に明記されていない限り、ToolsTalk 2ソフトウェアのすべてのバージョンは下位互換性があります
ToolsTalk2 | PF6 FlexSystem | PF6000 | PF6000 StepSync | アトラスコプコのデータ通信バージョン | IXB | PF8 | PF8 StepSync |
|---|---|---|---|---|---|---|---|
2.3 | 該当せず | 2.0、2.1、2.1、1、2.3 | 該当せず | 該当せず | 該当せず | 該当せず | 該当せず |
2.4 | 該当せず | 2.4 | 該当せず | 該当せず | 該当せず | 該当せず | 該当せず |
2.5 | 1.2 | 2.4 | 該当せず | 該当せず | 該当せず | 該当せず | 該当せず |
2.6 | 1.2 | 2.5 | 該当せず | 該当せず | 該当せず | 該当せず | 該当せず |
2.7 | 1.3 | 2.6 | 該当せず | 該当せず | 該当せず | 該当せず | 該当せず |
2.7.1 | 1.3.1 | 2.6 | 該当せず | 該当せず | 該当せず | 該当せず | 該当せず |
2.8 | 1.3.1 | 2.7 | 該当せず | 該当せず | 該当せず | 該当せず | 該当せず |
2.9 | 2.0 | 2.7 | 該当せず | 該当せず | 該当せず | 該当せず | 該当せず |
2.11 | 2.1 | 2.8 | 該当せず | 該当せず | 該当せず | 該当せず | 該当せず |
2.12 | 3.0 | 3.0 | 3.0 | 該当せず | 該当せず | 該当せず | 該当せず |
2.13 | 3.1 | 3.1.1 | 3.1.1 | 1.7 | 該当せず | 該当せず | 該当せず |
2.14 | 3.3 | 3.3 | 3.3 | 1.9 | 3.3 | 該当せず | 該当せず |
ToolsTalk 2はアトラスコプコデータ通信の上位バージョンで実行できます。マトリックスに記載されているアトラスコプコのデータ通信バージョンが、ToolsTalk 2ソフトウェアと互換性のある最も低いバージョンと見なされます。
インストールまたはアップグレードの前に
同じコンピュータに Station Setup とクライアント/サーバーの両方をインストールすることは推奨されません。コンピューターから不要なインストールのコンポーネントをアンインストールして、確実に消去してください。
サーバーのインストール
Microsoft SQL データベース、 ToolsTalk 2 サーバー アプリケーション、および ToolsTalk 2 クライアント アプリケーションは同じコンピューターにインストールすることが出来ます。
インストール開始前、次が使用可能なことを確認してください:
サーバーアプリケーションをインストールするコンピューターの管理者権限。
クライアントアプリケーションをインストールするコンピューターの管理者権限。
記載されている前提条件通りのコンピューターとプログラム。
記載の前提条件通りにインストールが完了した 64 ビットの Microsoft SQL データベース。
サーバーアプリケーション用実行可能ファイル。
クライアント アプリケーション用実行可能ファイル。
Atlas Copco Data Communication (ACDC)がインストールされ、実行されており、ToolsTalk 2 (ToolsTalk 2 2.13以降のバージョンのみ)の現在のバージョンと互換性があります。Atlas Copco Data Communication インストールのマニュアルを参照してください。
Station Setup
インストール開始前、次が使用可能なことを確認してください:
アプリケーションをインストールするコンピューターの管理者権限。
記載されている前提条件通りのコンピューターとプログラム。
Station Setup アプリケーション用実行可能ファイル。
データベースの要件
全てのコントローラ データおよび構成がデータベース カタログに格納されてること。データベースが標準 64 ビット Microsoft SQL データベースであること。
Microsoft SQL データベースのインストールについては本書に記載されていません。標準インストールに従うことが推奨されます。
Microsoft SQL データベースは、ToolsTalk 2アプリケーションと同じサーバーまたは同じネットワーク上に配置できます。
データベースが別の場所に配置されている場合は、データベースと ToolsTalk 2アプリケーションサーバー間でファイアウォールを正しく構成する必要があります。
アトラスコプコのデータ通信サーバーのIPアドレスが既知であり、これがToolsTalk 2に接続されているすべてのコントローラに入力されている必要があります。
リモート接続を使用する場合、クライアント PC はToolsTalk 2アプリケーションをホストするサーバーアドレスを知っている必要があります。
SQL データベースのインストールにおける必須事項
64ビットMicrosoft SQL。
Microsoft SQL サーバー認証とウィンドウ認証の両方を選択します。
Microsoft SQL データベースのインストールにおける推奨事項
インストールの管理スタジオを含めます。
既定のインスタンスを有効化させます。
コンピューターの要件
ToolsTalk 2のエコシステムは次の機能を必要とします:
クライアント、サーバー、Station Setup、ClickOnce には64ビットが必要です。
エリア | カテゴリ | 最低要件 | ToolsTalk 2 リリースバージョン | コメント |
|---|---|---|---|---|
サーバーソフトウェアの要件 | データベース | SQL Server 2014 R2 またはそれ以降のバーション SQL Express 2014 R2以降のバージョン(互換性があるが推奨されません) | データベースは同じコンピューター上に、またはリモート データベース サーバーにインストールすることが出来ます。 | |
Java | バージョン 8 以降 | ≥2.3 | 64 ビット バージョン | |
.NET Framework | バージョン 4.6 | 2.3 - 2.4 | ||
バージョン 4.6.2 | 2.5 - 2.12 | |||
バージョン 4.8 | 2.13 - 現在のバージョン | |||
サーバー ハードウェア要件 | プロセッサー | デュアルコア 2.70 GHz Intel Xenon またはそれ以上 | この仕様は必要とされる性能の目安としてのみ示されています。 | |
メモリ(RAM) | 4 GB | この仕様は必要とされる性能の目安としてのみ示されています。 | ||
ディスク領域 | 50 GB | データベースは時間の経過につれて大きくなることにご注意ください。構成および構成の変更はデータベースに保管されます。コントローラが増えると、データベースに追加される情報も増えます。 | ||
ディスク速度 | 5400 rpm 以上 | |||
PC クライアント要件 | オペレーティングシステム | Windows 10 Windows 7 | 2.14 2.3 - 2.13 | ToolsTalk 2バージョン 2.14 はWindows 7をサポートしていません! |
.NET Framework | バージョン 4.6 | 2.3 - 2.4 | ||
バージョン 4.6.2 | ≥2.5 - 2.12 | |||
バージョン 4.8 | 2.13 - 現在のバージョン | |||
ユーザー権限 | データベース アクセス | システム管理者アクセスまたは同等 | インストールを実行するユーザーは、データベースにユーザーを作成するための管理者権限も必要です。 | |
Windows アクセス | 管理者アカウント | アプリケーションとその依存関係のインストールに必要です。 |
ライセンス要件
Atlas Copco ライセンスサーバーは Functional Management System (FMS)がライセンスされている機能項目に使用されている際に必要となります。
ライセンスサーバーはサーバーインストール ファイルに含まれています。正常にインストールするにはJAVA_HOME システム変数が正しいパスを使用しており、64 ビット Java インストールを指している必要があります。
FMS はクライアント-サーバーインストールでのみ使用が可能で、ステーション セットアップのインストールでは使用できません。
インストール手順
ToolsTalk 2アプリケーションのインストール順序はいずれも、次の通りです:
インストールする前に、コンピュータとデータベースの要件がすべて満たされていることを確認してください。
Microsoft SQLサーバーをインストールします。

正しいインストール手順については、 https://docs.microsoft.com/en-us/sql/database-engine/install-windows/install-sql-server?view=sql-server-ver15を参照してください 。
必要に応じて、Atlas Copco Data Communicationをインストールします。
詳細については、「Atlas Copco Data Communicationインストールガイド」を参照してください。
必要なToolsTalk 2アプリケーションをインストールします。
ToolsTalk 2クライアントアプリケーションをインストールする場合はToolsTalk 2アプリケーションを展開します。またはスタートメニューからアプリケーションを実行し、必要に応じてショートカットを作成します。
ご購入の正しい機能を使用するため、ToolsTalk 2アプリケーションをライセンス登録します。
ソフトウェアのインストール
ToolsTalk2構成ウィンドウ
ToolsTalk 2構成では、最初にToolsTalk 2 ソフトウェアのインストールを完了してから、別のインストールパラメータを設定することができます。各インストールタイプのToolsTalk 2構成は、インストール後にスタートメニューのショートカットとして使用できるため、いつでもアクセスしてインストールパラメータを変更できます。
既定のインストール場所
インストール | 既定の場所 | 備考 |
|---|---|---|
ToolsTalk 2 サーバー | C:\Program Files (x86)\Atlas Copco\ToolsTalk Server\ | ユーザー指定の場所に変更可能です |
ToolsTalk 2 ClickOnce | C:\Program Files (x86)\Atlas Copco\ToolsTalk ClickOnce\ | ユーザー指定の場所に変更可能です |
ToolsTalk 2 クライアント | C:\Program Files (x86)\Atlas Copco\ToolsTalk Client\ | ユーザー指定の場所に変更可能です |
ToolsTalk 2 StationSetup | C:\Program Files (x86)\Atlas Copco\ToolsTalk StationSetup\ | ユーザー指定の場所に変更可能です |
AtlasCopco FMS | C:\ProgramData\AtlasCopcoFMS\ | 既定のパスは変更しないでください! |
Flexera Logs | C:\Windows\ServiceProfiles\NetworkService\Flexnetls\acopco\logs | 既定のパスは変更しないでください! |
ToolsTalk サーバーアプリケーションのインストール
ToolsTalk 2 サーバーのインストール開始前に、インストールまたはアップグレード開始前のセクションに記載の要件を満たしていることを確認してください。
サーバーアプリケーションをインストールする前に、Atlas Copco Data Communication(ACDC)がインストール・実行されており、現バージョンのToolsTalk 2(ToolsTalk 22.13以降のバージョンのみ)と互換性があることを確認してください。『Atlas Copco Data Communicationインストールマニュアル』を参照してください。
実行可能ファイル ToolsTalkServer<xxx>.exe をコンピューターの目的のフォルダーに配置します。<xxx> はファイルのバージョンを示します。
実行可能ファイルをダブルクリックします。
はい を選択して、このアプリがデバイスに変更を加えることを許可しますか?
続行するには、アトラスコプコのTools Talkサーバー - InstallShield ウィザードのウィンドウで[次へ]を選択します。
読んでから、使用許諾契約の条項に同意するを選択します。次へ をクリックして続行します。
使用許諾契約書を印刷する場合は、[印刷] を選択します。
別の場所にアプリケーションをインストールするには、[変更...] を選択します。既定の場所は C:\Program Files (x86)\Atlas Copco\ToolsTalk Server\ です。
次へ をクリックして続行します。
[インストール] を選択してインストールを完了します。
[完了] を選択してインストールを完了すると、[ToolsTalk 2 の構成] ウィンドウが開きます。あるいは、Windows から [ユーザーアクセス コントロール] ダイアログが表示される場合もあります。
Windows でアクセス許可を要求するユーザーアクセス コントロールのダイアログが表示されたら、[このアプリによるデバイスへの変更を許可しますか?]に対して[はい] を選択します。
インストールが完了すると、[ToolsTalk 2の構成] ウィンドウが開きます。
[いいえ] を選択すると、 ToolsTalk2 の構成のウィンドウは自動的に開かないため、Windowsの [スタート] メニューからアクセスする必要があります。Windowsの[スタート]メニューからToolsTalk 2コンフィギュレーターを開いた場合は、 ToolsTalk 2の構成ウィンドウの下部にある[強制初期化]を選択して、インストール手順を完了します。
インストール中にエラーが発生した場合、またはステップ、パラメーター名、パラメーター値がよくわからない場合、トラブルシューティング のセクションで詳細情報を見つけてください。
[サーバー設定]にパラメータを入力します。
[保存] を選択すると、 サーバー設定が 保存され、サービスの再起動が試行されます。
データベースのインストール設定を入力および完了する前に [保存] を選択すると、「 変更は受け入れられましたが、依存する Windows サービスを制御できませんでした 」というエラーが表示されます。
[データベースのインストール設定] に移動し、[ユーザー名] と [パスワード] を入力し、[接続のテスト] を選択してデータベース接続をテストします。
ユーザー名とパスワードは、Microsoft SQL Serverのインストールに使用したものと同じである必要があります。
[データベースのインストール] を選択します。
データベースが正常にインストールされると、「データベースの作成に成功しました」というメッセージが表示されます。
[保存]して[閉じる]を選択します。
依存サービスが開始されていないという通知を受けた場合は、 FNLS-acopcoサービスを再起動して、 ToolsTalk 2を再構成します。両方のサービスが起動して実行されている場合は、インストールを続行します。
サーバー設定パラメータ
パラメーター | 説明 |
|---|---|
SQL サーバーアドレス | SQL サーバーの IP アドレスまたはホスト名 Microsoft Windows Defender ファイアウォールは、ネットワークを介した SQL Server への接続を禁止します。したがって、TCP/IP を使用して接続を受け入れるように SQL Server を構成する必要があります。この設定は、[Windows コンピュータの管理] の [SQL Server 構成マネージャー] のセクションで変更できます。 コンピュータの管理 → SQL Server構成マネージャー → SQL Serverネットワーク構成 → MSSQLSERVERのプロトコル → TCP/IP → 有効 |
データベース名 | ToolsTalk 2によって使用されるデータベース/カタログデータベースが存在しない場合は、データベースのインストール中にデータベースが作成されます。 |
パラメーター | 説明 |
|---|---|
認証モード | ユーザー権限の検証に使用される認証モード。[Windows] (Active Directory) または [なし] を選択します。 |
Active Directoryグループ | 選択した認証モードが Windows の場合にのみ表示されます。ユーザーが所属する必要があるアクティブ ディレクトリ グループを指定します。例:DOMAIN\GROUP |
サーバアドレス | ToolsTalk 2 サーバーの IP アドレスまたはホスト名 |
Web アプリケーション ポート | ToolsTalk 2用の通信ポート |
コントローラポート | ポート9016は、デフォルトのコントローラポートとして使用されます。ポート9016を使用する場合は、このポートが開いていることを確認して接続可能であることを確認してください。そうしないと、アプリケーションは機能しません。 ポート80は、ToolsTalk 2のコントローラの接続/切断/追加機能を使用して、コントローラと対話する場合に使用されます。 |
入力するコントローラポートが開いており、接続できることを確認してください!
パラメーター | 説明 |
|---|---|
コントローラのバックアップフォルダー | コントローラのバックアップが配置されるフォルダーを指定します。 |
パラメーター | 説明 |
|---|---|
サーバアドレス | Atlas Copco Data Communication サーバーの IP アドレスまたはホスト名 |
Web APIポート | Web API用ポート |
SignalRポート | SignalR用ポート |
データベースのインストール設定
パラメーター | 説明 |
|---|---|
ユーザー名 | データベース/カタログを作成するための資格情報を持つデータベース ユーザーのユーザー名。通常、システム管理者の資格情報を指します。 |
パスワード | パスワードを入力します。通常、システム管理者の資格情報を指します |
パラメーター | 説明 |
|---|---|
手動スクリプト | データベースが手動で作成されたかどうかを指定します。 このボックスをチェックすると、ToolsTalk 2 はすでに SQL カタログとデフォルトユーザーを手動で作成していると想定します。入力したユーザー名とパスワードは、SQL サーバーに接続する既定の資格情報であり、構成ファイルにクリア テキストで格納されます。 この設定は、データベースカタログとユーザーを自分で作成した場合にのみ使用してください。 |
ToolsTalk 2アプリケーションは、[スタート] メニューにあります。
クライアントアプリケーションのインストール
ToolsTalk 2 クライアントのインストール開始前に、インストールまたはアップグレード開始前のセクションに記載の要件を満たしていることを確認してください。
実行可能ファイル ToolsTalkClient<xxx>.exe をコンピューターの目的のフォルダーに配置します。<xxx> はファイルのバージョンを示します。
実行可能ファイルをダブルクリックします。
はい を選択して、このアプリがデバイスに変更を加えることを許可しますか?
続行するには、アトラスコプコのTools Talkサーバー - InstallShield ウィザードのウィンドウではいを選択します。
読んでから、使用許諾契約の条項に同意するを選択します。次へ をクリックして続行します。
使用許諾契約書を印刷する場合は、[印刷] を選択します。
別の場所にアプリケーションをインストールするには、[変更...] を選択します。デフォルトの場所はC:\Program Files (x86)\Atlas Copco\ToolsTalk Client\です
次へ をクリックして続行します。
[インストール] を選択してインストールを完了します。
[完了] を選択してインストールを完了します。
インストール中にエラーが発生した場合、またはステップ、パラメーター名、パラメーター値がよくわからない場合、トラブルシューティング のセクションで詳細情報を見つけてください。
インストールが完了すると、[ToolsTalk 2の構成] ウィンドウが開きます。
[クライアント設定] にパラメータを入力し、[保存] を選択します。
サーバー設定 パラメーター
説明
認証モード
ユーザー権限の検証に使用される認証モード。[Windows] (Active Directory) または [なし] を選択します。
サーバアドレス
ToolsTalk 2 サーバーの IP アドレスまたはホスト名
Web アプリケーション ポート
ToolsTalk 2用の通信ポート
サービス URL を IP アドレスに変換する
オンまたはオフ。[オン] を選択すると、アドレスでホスト名が使用されている場合は、IP アドレスに変換されます。
ToolsTalk 2アプリケーションがインストール済みで、デスクトップでショートカットが利用可能です。
ClickOnce を使用したクライアントのインストール
実行可能ファイル ToolsTalkServerClickOnce<xxx>.exe をコンピューターの目的のフォルダーに配置します。<xxx> はファイルのバージョンを示します。
実行可能ファイルをダブルクリックします。
はい を選択して、このアプリがデバイスに変更を加えることを許可しますか?
続行するには、アトラスコプコのTools Talkサーバー ClickOnce - InstallShield ウィザードのウィンドウで[次へ]を選択します。
読んでから、使用許諾契約の条項に同意するを選択します。次へ をクリックして続行します。
使用許諾契約書を印刷する場合は、[印刷] を選択します。
別の場所にアプリケーションをインストールするには、[変更...] を選択します。既定の場所は C:\Program Files (x86)\Atlas Copco\ToolsTalk ClickOnce\ です。
次へ をクリックして続行します。
[インストール] を選択してインストールを完了します。
[完了] を選択してインストールを完了すると、[ToolsTalk 2 の構成] ウィンドウが開きます。あるいは、Windows から [ユーザーアクセス コントロール] ダイアログが表示される場合もあります。
Windows でアクセス許可を要求するユーザーアクセス コントロールのダイアログが表示されたら、[このアプリによるデバイスへの変更を許可しますか?]に対して[はい] を選択します。
インストールが完了すると、[ToolsTalk 2の構成] ウィンドウが開きます。
[いいえ] を選択すると、 ToolsTalk 2 の構成のウィンドウは自動的に開かないため、Windowsの [スタート] メニューからアクセスする必要があります。Windowsの[スタート]メニューからToolsTalk 2コンフィギュレーターを開いた場合は、 ToolsTalk 2の構成ウィンドウの下部にある[強制初期化]を選択して、インストール手順を完了します。
インストール中にエラーが発生した場合、またはステップ、パラメーター名、パラメーター値がよくわからない場合、トラブルシューティング のセクションで詳細情報を見つけてください。
[サーバー設定]にパラメータを入力します。
[保存] を選択すると、 サーバー設定が 保存され、サービスの再起動が試行されます。
データベースのインストール設定を入力および完了する前に [保存] を選択すると、「 変更は受け入れられましたが、依存する Windows サービスを制御できませんでした 」というエラーが表示されます。
[データベースのインストール設定] に移動し、[ユーザー名] と [パスワード] を入力し、[接続のテスト] を選択してデータベース接続をテストします。
ユーザー名とパスワードは、Microsoft SQL Serverのインストールに使用したものと同じである必要があります。
[データベースのインストール] を選択します。
データベースが正常にインストールされると、「データベースの作成に成功しました」というメッセージが表示されます。
[保存]して[閉じる]を選択します。
依存サービスが開始されていないという通知を受けた場合は、 FNLS-acopcoサービスを再起動して、ToolsTalk 2を再構成します。両方のサービスが起動して実行されている場合は、インストールを続行します。
サーバー設定パラメータ
パラメーター | 説明 |
|---|---|
SQL サーバーアドレス | SQL サーバーの IP アドレスまたはホスト名 Microsoft Windows Defender ファイアウォールは、ネットワークを介した SQL Server への接続を禁止します。したがって、TCP/IP を使用して接続を受け入れるように SQL Server を構成する必要があります。この設定は、[Windows コンピュータの管理] の [SQL Server 構成マネージャー] のセクションで変更できます。 コンピュータの管理 → SQL Server構成マネージャー → SQL Serverネットワーク構成 → MSSQLSERVERのプロトコル → TCP/IP → 有効 |
データベース名 | ToolsTalk 2によって使用されるデータベース/カタログデータベースが存在しない場合は、データベースのインストール中にデータベースが作成されます。 |
パラメーター | 説明 |
|---|---|
認証モード | ユーザー権限の検証に使用される認証モード。[Windows] (Active Directory) または [なし] を選択します。 |
Active Directoryグループ | 選択した認証モードが Windows の場合にのみ表示されます。ユーザーが所属する必要があるアクティブ ディレクトリ グループを指定します。例:DOMAIN\GROUP |
サーバアドレス | ToolsTalk 2 サーバーの IP アドレスまたはホスト名 |
Web アプリケーション ポート | ToolsTalk 2用の通信ポート |
コントローラポート | ポート9016は、デフォルトのコントローラポートとして使用されます。ポート9016を使用する場合は、このポートが開いていることを確認して接続可能であることを確認してください。そうしないと、アプリケーションは機能しません。 ポート80は、ToolsTalk 2のコントローラの接続/切断/追加機能を使用して、コントローラと対話する場合に使用されます。 |
サービス URL を IP アドレスに変換する | オンまたはオフ。[オン] を選択すると、アドレスでホスト名が使用されている場合は、IP アドレスに変換されます。 |
入力するコントローラポートが開いており、接続できることを確認してください!
パラメーター | 説明 |
|---|---|
コントローラのバックアップフォルダー | コントローラのバックアップが配置されるフォルダーを指定します。 |
Active Directory グループと コントローラのバックアップフォルダ は、既定では空になっています。
パラメーター | 説明 |
|---|---|
サーバアドレス | Atlas Copco Data Communication サーバーの IP アドレスまたはホスト名 |
Web APIポート | Web API用ポート |
SignaIR ポート | SignaIR 用ポート |
データベースのインストール設定
パラメーター | 説明 |
|---|---|
ユーザー名 | データベース/カタログを作成するための資格情報を持つデータベース ユーザーのユーザー名。通常、システム管理者の資格情報を指します。 |
パスワード | パスワードを入力します。通常、システム管理者の資格情報を指します |
パラメーター | 説明 |
|---|---|
手動スクリプト | データベースが手動で作成されたかどうかを指定します。 このボックスをチェックすると、ToolsTalk 2 はすでに SQL カタログとデフォルトユーザーを手動で作成していると想定します。入力したユーザー名とパスワードは、SQL サーバーに接続する既定の資格情報であり、構成ファイルにクリア テキストで格納されます。 この設定は、データベースカタログとユーザーを自分で作成した場合にのみ使用してください。 |
リモートマシンへのクライアントの展開
Web ブラウザーで次のリンクを使用してサーバーに行きます:
http://<FULL COMPUTER NAME>:<PORT NUMBER>/deploym

<フル コンピューター名> および <ポート番号>を入れ替えます。
<フル コンピューター名> はサーバーとデータベースの位置する場所と完全に一致することを確認します。フルコンピュータ名[TOOLSE277256.ATLASCOPCO.COM]またはコンピューター名[TOOLSE277256]が設定されている場合、DNSサーバーが存在し、コントローラに設定されている必要があります。どうでない場合、ToolsTalk 2環境にコントローラを追加することができません。
実行可能ファイル ToolsTalk.Client.WPF.Desktop.application をコンピューターに保存します。
実行可能ファイルをダブルクリックするか、促された場合は開く を選択します。
ToolsTalk 2 クライアントはインストールされている最新バージョンを開きます。
ToolsTalk 2 クライアントは ClickOnce を使用して常に最新バージョンのサーバーで開きます。
ローカルマシンへのクライアントの展開
ClickOnceがデフォルトのフォルダーにインストールされている場合は、「 C:\Program Files (x86)\Atlas Copco\ToolsTalk ClickOnce\ClientDeploy 」に移動し、 ToolsTalk.Client.WPF.Desktopアプリケーションマニフェストファイルをダブルクリックしてクライアントを展開します。
インストールが完了すると、 ToolsTalk 2デスクトップにアイコンが作成されます。
Station Setup アプリケーションのインストール
縮小版 Station Setup のインストールにはコントローラ構成の全機能を備えていますが、いくつかの制限があります:
インストール全体のメモリ占有領域は小さくポータブル コンピューターにインストールできます。
同時に管理できるのは1つの物理的コントローラのみです。
コンピューターは通常の活動を妨害しないように、コントローラのサービスポートに接続されます。
用途
この操作モードでの一般的なアプリケーションには次が挙げられます:
コントローラには、顧客ネットワークに接続せずに、ToolsTalk 2を使用してアクセス可能です。代わりにコントローラのサービスポートを使用してアクセスします。
コントローラ ライブラリ機能を使用したコントローラのオフライン構成です。構成ファイルは、検証用に後ほど実際のコントローラに転送できます。
コントローラ構成が簡単にエクスポートできるので、デバッグ作業に役立ちます。
ToolsTalk 2 Station Setup のインストール開始前またはアップグレード前に、インストール開始前のセクションに記載の要件を満たしていることを確認してください。
実行可能ファイル ToolsTalkStationSetup<xxx>.exe をコンピューターの目的のフォルダーに配置します。<xxx> はファイルのバージョンを示します。
実行可能ファイルをダブルクリックします。
はい を選択して、このアプリがデバイスに変更を加えることを許可しますか?
続行するには、アトラスコプコのTools Talkサーバー - InstallShield ウィザードのウィンドウで[次へ]を選択します。
読んでから、使用許諾契約の条項に同意するを選択します。次へ をクリックして続行します。
使用許諾契約書を印刷する場合は、[印刷] を選択します。
別の場所にアプリケーションをインストールするには、[変更...] を選択します。既定の場所は C:\Program Files (x86)\Atlas Copco\ToolsTalk StationSetup\ です。
次へ をクリックして続行します。
[インストール] を選択してインストールを完了します。
[完了] を選択してインストールを完了します。
インストール中にエラーが発生した場合、またはステップ、パラメーター名、パラメーター値がよくわからない場合、トラブルシューティング のセクションで詳細情報を見つけてください。
インストールが完了すると、[ToolsTalk 2の構成] ウィンドウが開きます。
[サーバー設定] タブにパラメータを入力し、[保存] を選択します。
パラメーター | 説明 |
|---|---|
ToolsTalkユーザー名 | アプリケーションでローカルなユーザーのユーザー名。 |
サーバアドレス | ToolsTalk 2 サーバーの IP アドレスまたはホスト名 |
Web アプリケーション ポート | ToolsTalk 2用の通信ポート |
パラメーター | 説明 |
|---|---|
Web API | Web API ポート |
SignalR | SignalR ポート |
コントローラポート | ポート9016は、デフォルトのコントローラポートとして使用されます。ポート9016を使用する場合は、このポートが開いていることを確認して接続可能であることを確認してください。そうしないと、アプリケーションは機能しません。 ポート80は、ToolsTalk 2のコントローラの接続/切断/追加機能を使用して、コントローラと対話する場合に使用されます。 |
入力するコントローラポートが開いており、接続できることを確認してください!
ToolsTalk 2アプリケーションは、[スタート] メニューにあります。
Station Setup の接続
ToolsTalk 2の Station Setupを備えたコンピューターはネットワークを通じて、またはサービスポートから直接コントローラに接続できます。
ネットワーク接続
コントローラのToolsTalk 2サーバー接続アドレスはこのコンピューターを指定する必要があります。指定は、コントローラ GUI または Web GUI から行います。
ToolsTalk 2 Station Setupを備えたコンピューターでは、同時に1台のコントローラのみ接続できます。ToolsTalk 2 Station Setupを備えたコンピューターにオンライン コントローラが接続されている場合、別のコントローラからの接続試行は無視されます。
コントローラサービスポートの接続
ToolsTalk 2を搭載したPCをネットワークに接続できない場合、コントローラサービスポートを使用してコントローラをToolsTalk 2に接続できます。たとえば、アトラスコプコまたは外部のサービス技師が工場を訪問し、外部コンピュータを工場ネットワークに接続することはできません。
コンピューターがコントローラのサービスポートに接続されている場合、コントローラは DHCP サーバーとして機能し、コンピューターに IP アドレスを提供します。このアドレスはToolsTalk 2接続用コントローラサーバー接続アドレスフィールドに入力する必要があります。
ファイル比較
コンフィギュレーターは、すべての構成設定のコピーをStorageという .xml ファイルとして保存します。このファイルは、製品構成 .xml ファイルの手動変更を識別するのに役立ちます。製品構成 .xml ファイルが変更されている場合、コンフィギュレーターを開始すると、[ファイル比較]ウィンドウが開き、[ストレージファイルを使用]または[構成ファイルを使用]のオプションが選択できます。
SoftPLC コンフィギュレータのインストール
コントローラで SoftPLC 機能を使用できるようにするには、ToolsTalk 2 クライアントがインストールされているコンピュータに SoftPLC コンフィギュレータをインストールする必要があります。
MultiProg551_Atlas_Installation の入ったUSB メモリまたは同様のものを挿入します。
MultiProg551_Atlas_Installation の Installation.bat をダブルクリックすると、インストールが開始します。
インストールが完了した際に ToolsTalk クライアントを開きます(再起動不要)。
ToolsTalk 2クライアントで、フィールドバスと SoftPLC
 タブに移動します。SoftPLC構成セクションを選択し、一般SoftPLCの設定でSoftPLCをオンに設定します。
タブに移動します。SoftPLC構成セクションを選択し、一般SoftPLCの設定でSoftPLCをオンに設定します。
ソフトウェアのアンインストール
各モジュール(クライアント、サーバ、 Station Setup)は、次のようにアンインストールできます:
Windows コントロール パネル/プログラムと機能を使用して、目的のプログラムとモジュールを選んでアンインストールします。
一部のモジュールでは、変更を有効にするためにコンピュータの再起動が必要な場合があります。
インストールの検証
Windows システムサービスの検証
バックグラウンド プログラムやサービスが正常に開始したことを確認するため、次の確認を行います:
Windowsの[検索]ボタンを選択します。
[検索ウィンドウ] 入力ボックスに「サービス」と入力します。
スクロールダウンして Atlas Copco Industrial Technique Host for ToolsTalk が開始したことを確認します。
このことはToolsTalk 2サーバーアプリケーションが実行中であることを示します。
スクロールダウンして FlexNet License server - acopco が開始したことを確認します。
このことは機能管理システム用ライセンスサーバー アプリケーションが実行中であることを示します。
クライアント-サーバーインストールの検証
ToolsTalk 2 アプリケーションのクライアント - サーバー バージョンが正常にインストール出来た後は、システムのテストにコントローラが必要となります。
サーバー コンピューターはネットワークに接続されている必要があります。
クライアント コンピューターはネットワークに接続されている必要があります。
コンピューターはネットワークに接続されていて、サーバーコンピューターと通信するように構成されている必要があります。
Atlas Copco Data Communicationサービスが開始されていることを確認します。
サーバーとクライアントは同じコンピューターにインストールすることが出来ます。
コントローラの構成とスタートについてはコントローラのユーザーガイドをご覧ください。
ToolsTalk 2 GUI 中でのスタートや移動に関する構成については ToolsTalk 2 ユーザーガイドをご覧ください。
ToolsTalk 2 クライアントがインストールされている場合、アプリケーションは次の方法で開始できます。
Windowsの[スタート]メニューを選択し、ToolsTalk 2フォルダーを見つけます。
ToolsTalk 2 のアイコン
 を選択してアプリケーションを起動します。
を選択してアプリケーションを起動します。
Station Setup のインストール検証
ToolsTalk 2 Station Setup がインストールされている場合、アプリケーションは次の方法で開始できます。
Windowsの[スタート]メニューを選択し、ToolsTalk 2フォルダーを見つけます。
ToolsTalk 2 のアイコン
を選択してアプリケーションを起動します。
ToolsTalk 2 Station Setup のアプリケーションは、 ToolsTalk 2 クライアント アプリケーションまたは ToolsTalk 2 サーバーアプリケーションがインストールされている場合には実行できません。各インストール プログラムを実行して プログラムのメンテナンス ウィンドウ.の削除 のオプションを選択することで簡単に削除できます。
はじめに セクション(ToolsTalk 2ユーザーガイド) は Windows および Windows でのナビゲーションを説明しています。
ToolsTalk 2 Station Setup アプリケーションは、別のコントローラが接続されていない場合、多少異なります。構成マニュアルにあるライブラリ  のアイコンおよびコントローラ ライブラリ
のアイコンおよびコントローラ ライブラリ  のアイコンの下の情報をご覧ください。
のアイコンの下の情報をご覧ください。
ライセンスサービスの検証
この検証プロセスは、クライアント、サーバー、およびClickOnceアプリケーションのインストールにのみ適用され、ステーションセットアップのインストールには無効です。
ToolsTalk 2 のインストールが完了したら、起動時にライセンスサービスの準備ができていることを確認する必要があります。
Webブラウザーを開き、次の2つのページを参照して手順を完了します。
http://”ip-address:port"/api/1.0/health - このページには次が有ります。 「connectionCheck」 : 「success」、そうでない場合は、Flexeraサービスを再起動する必要があります。場合によっては、複数回の再起動が必要になることがあります。
http://”ip-address:port"/api/1.0/hostids - このページが空の場合は、Flexera サービスを再起動する必要があります。場合によっては、複数回の再起動が必要になることがあります。
この検証プロセスは、Station Setupのインストールには適用されません。
ToolsTalk 2のアップグレード
アップグレードを開始する前に、ToolsTalk2 サーバーが実行されていることを確認してください。
ToolsTalk 2を2.12以前のバージョンからアップグレードし、Atlas Copco Data Communication(ACDC)がすでにインストールされている場合は、コントローラポートがACDCがインストールされているポートと同じポートを指していることを確認してください。ACDC を初めてインストールし、ToolsTalk 2バージョンで現在のコントローラポート以外のポートを使用する場合は、次の手順に従ってコントローラポートを変更してください。
構成ファイルでは、コントローラーポートの名前はHubPortです。
ToolsTalk.Server.SelfHostService.exe.config(ClickOnce/Client/Server) または ToolsTalk.Standalone.exe.config(Station Setup) で、コントローラのポートを正しいポート番号 <add key="HubPort" value="XXXX" /> に変更します。
トラブルシューティング
インストール中のトラブルシューティング
<meta-ref type="dynamic" name="AC.ITBA.Variable.product_name__1">ToolsTalk 2</meta-ref> のアップグレード後、ToolsTalk Industrial Technique Host service を再起動します。
エラー | ソリューション |
|---|---|
エラーコード1920 スタートに失敗しました。アクセス権があることを確認してください。 | データベース認証エラーSQL データベースでは混合モードの認証を構成する必要があります。 SQL 管理スタジオを使用して認証を修正する必要があります。再度のインストールを試行する前にコンピューターを再起動する必要があると思われます。 |
InstallShield ウィザードは、インストールファイルの使用時に既にインストールがされているかどうかを検出します。コンピューターに古いインストールが存在する場合、検出されない場合もあります。
そのため、新たなインストールの開始前に、プログラムとデータベース カタログの古いインスタンスの削除を行うことが推奨されます。
設定
このセクションでは、製品設定を作成、変更、および確認する方法の詳細について説明します。
はじめに
開始
ToolsTalk 2クライアントがインストールされている場合、アプリケーションは次の手順で開始できます。
Windows のスタートメニューを選択し、すべてのプログラムを開いて、 ToolsTalk 2までスクロールします。
フォルダを開き、ToolsTalk 2
を選択してアプリケーションを起動します。
ユーザーインターフェイスのスタートビュー
ToolsTalk 2 を正常に開始すると、上記のアイコンを含む、次のビューが表示されます。

A | 左側のメニューバー | C | システムメニューバー |
B | プラント構造ワークスペース | D | コントローラワークスペース |
コントローラワークスペースエリアには、選択するアイコンやメニューによって異なる内容が表示されます。
開始時における既定のアイコン選択は [プラント構造] アイコン です。選択はアイコンの色が水色に変わることで示されます。ワークスペースは2つの部分に分かれています。
です。選択はアイコンの色が水色に変わることで示されます。ワークスペースは2つの部分に分かれています。
構造ワークスペースは、コントローラを整理し、個々のコントローラを選択するために使用されます。
コントローラワークスペースには、すべてのコントローラアイコンが表示され、選択した1つのコントローラのすべてのパラメータと設定を表示・設定するために使用されます。
左メニューバー | 機能 |
|---|---|
プラント構造 | プラント構造 アイコン |
システム管理 | システム管理アイコン |
ライブラリ | ライブラリアイコン |
システムメニューバー | 機能 |
|---|---|
変更のプッシュ | プッシュアイコン |
ユーザー設定 | ユーザー設定アイコン |
ヘルプ | ヘルプ |
 。言語、トルク単位、温度単位の選択。
。言語、トルク単位、温度単位の選択。 アイコンは
アイコンは ToolsTalk 2にコントローラが接続されていない場合、またはフォルダまたはコントローラにアクセスするユーザー権限がない場合は、プラント構造ビューは空白です。
コントローラ
コントローラタイプ
互換性があり、かつToolsTalk 2を使用して構成可能なコントローラとは別に、他のコントローラタイプとそれらに関するいくつかの限られた情報を、コントローラリストにを表示する機能があります。構成可能でないコントローラは、ToolsTalk 2 を使用して関連するソフトウェアを起動し、そこからさらに構成が可能となります。
別のコントローラタイプは、[すべてのコントローラ]リストにアイコンで表示されます。
コントローラアイコン | コントローラタイプ | 互換性のあるソフトウェア |
|---|---|---|
| Power Focus 6000 | ToolsTalk 2 |
| PF6 Flex System | ToolsTalk 2 |
| Power Focus 6000 StepSync | ToolsTalk 2 |
| Power Focus 4000 | ToolsTalkPF |
| Power Macs 4000 | ToolsTalkPM |
| サポートされていないコントローラ - より高いバージョンで現在のToolsTalk 2リリースと互換性のないコントローラ | 該当せず |
| IXB | ToolsTalk 2 |







コントローラ情報
Power Focus 4000 または Power Mac 4000 コントローラで表示できる情報の例を次に示します。サポートされていないコントローラには、この情報は表示されません。
アプリケーション起動ソフトウェアのバージョン
コントローラのシリアル番号
プロトコルバージョン
RBU シリアル番号
RBU タイプ
ソフトウェアバージョン
ツール情報
以下の情報は、ToolsTalk 2の[ツール]の下に表示されます。ここに表示される内容は、それぞれのコントローラソフトウェアで構成されています。
識別子
シリアル番号
モデルタイプ
サービス日
校正日
締め付け回数
ツールタイプ
サービス以来の締め付け回数
アプリケーションコードのバージョン
ブートコードのバージョン
ツール情報を受信するには、コントローラをACDCに接続する必要があります。詳細については、ToolsTalk 2 のドキュメントを参照してください。
コントローラーの追加
ToolsTalk 2に接続されているコントローラは プラント構造
に表示できます。
ToolsTalk 2にコントローラが接続されていない場合、またはフォルダまたはコントローラにアクセスするユーザー権限がない場合は、プラント構造ビューは空白です。
プラント構造を選択し、コントローラリストの上部領域の任意の場所を右クリックします。または、 システム管理を選択し、 コントローラソフトウェアとデータ管理タブで、左側のメニューワークスペース領域を 右クリックします。新しいコントローラの追加を選択します。コントローラの接続ダイアログウィンドウが開きます。
IPアドレスか、またはコントローラのDNS名を入力してください。ToolsTalk 2サーバのIPアドレスは前もって設置されます。
コントローラがオンライン のメッセージが表示されたら、[接続] を選択し、[閉じる] を選択します。
接続状態
「コントローラの接続」ウィンドウですでに接続されているコントローラのIPアドレスを入力すると、「 コントローラはすでに接続されてオンラインです」というメッセージが表示されます。
接続が確立されている間、「 コントローラがオンラインになるのを待機中です」というメッセージが表示されます。
コントローラへの接続が確立されると、「コントローラがオンラインです 」というメッセージが表示されます。
メッセージ、「 ToolsTalk がコントローラに接続できませんでした。IPアドレス/DNS名が表示されていることを確認してください」と表示されます(接続に失敗した場合)。
コントローラは、Web GUIまたはコントローラGUIを介してToolsTalk 2 アプリに接続できます。
この手順については、コントローラ固有のマニュアルを参照してください。
コントローラーリストの管理
プラント構造ワークスペース の既定のビューには、すべてのコントローラが表示されます。すべてのコントローラフォルダーには、オンラインかオフラインかに関わらず、現在、ToolsTalk 2 サーバーに接続されている全てのフォルダーが含まれます。カスタム セクションは、フォルダーに順序付けて入れられた全てののコントローラのサブセクションです。
カスタムセクションフォルダーの選択
コントローラリストで、オプションボタンをクリックして  カスタム セクションを選択し、続いて適切なフォルダーを選択します。
カスタム セクションを選択し、続いて適切なフォルダーを選択します。
コントローラの選択
左側のメニューバーで プラント構造
を選択します。該当するコントローラにスクロールダウンして、名前のフィールド
 をクリックして選択します。
をクリックして選択します。 選択したコントローラがハイライト表示になります。オンライン状態のコントローラは、ToolsTalk 2アプリケーションを常に更新します。
オフラインのコントローラ名には取り消し線が付いています。
オフライン状態のコントローラは、ToolsTalk 2以外の別のコントローラ・インターフェースを通して変更が行われた場合には、古く最新でない情報が表示されることがあります。
数人のToolsTalk 2ユーザーが同じコントローラにアクセスすることは可能です。コントローラを選択する試みを行うとき、そのコントローラが、誰か別のToolsTalk 2ユーザーによって既に選択されている場合、モーダルダイアログボックスが以下の警告メッセージと共に表示されます。
他のユーザーがシステム内で現在アクティブです。パラメーター値は予告なく変更することがあります。
OK を選択して、ダイアログボックスを閉じて続行します。
コントローラの検索
プラント構造 ワークスペースには、コントローラ・リストでコントローラを検索する為のフィールドがあります。
検索フィールドに、コントローラ名の2個以上の文字を入力してください。
コントローラ名またはコントローラのタイプを利用して、検索することが可能です。
リモートコントローラーの再起動
状況によっては、コントローラの完全なパワーオンリセット (POR) が必要になることがあります。
以下では、ToolsTalk 2からリモートPOR を作成する方法について説明します。
左側のメニューバーで プラント構造
を選択します。選択したコントローラを右クリックし、ショートカットメニューで再起動を選択します。
モーダルウィンドウダイアログでコントローラの再起動操作を確認またはキャンセルします。コントローラはまずオフラインになってから、オンラインに戻ります。
この操作には数分かかります。
これが進捗している間に、ToolsTalk 2のその他のタスクを実行することが可能です。
コントローラを遠隔で再起動できるのは、コントローラがオンラインで、かつToolsTalk 2アプリ・サーバーに接続されている場合だけです。オフラインのコントローラ名には取り消し線が付いています。
パラメータと構成の変更を保存する
コントローラのステータスが[オンライン]になっている場合、Web GUIまたはコントローラGUIで何らかの変更が行われた際、自動的にToolsTalk 2が更新されます。
ToolsTalk 2 で行われた変更は自動的に保存されますが、コントローラにはコピーされません。プッシュは変更をコントローラにコピーし、アクティブなコマンドによって実行されます。
プラント構造ワークスペースのコントローラ名の横にプッシュインジケータ が表示され、ToolsTalk 2で構成変更が行われたものの、まだコントローラにコピーされていないことを示します。
が表示され、ToolsTalk 2で構成変更が行われたものの、まだコントローラにコピーされていないことを示します。
プッシュは複数の方法で行うことができます。
コントローラリストのコントローラ名の横にあるプッシュ配信インジケーターアイコン
を選択します。システムメニューバーのプッシュコマンドボタン
 をクリックして、 ToolsTalk 2から 1 つまたは複数のコントローラへの変更のコピーを開始します。ショートカットメニューが開き、対象のコントローラを選択できます
をクリックして、 ToolsTalk 2から 1 つまたは複数のコントローラへの変更のコピーを開始します。ショートカットメニューが開き、対象のコントローラを選択できますプラント構造
ワークスペースのコントローラ名を右クリックして、ショートカットメニューの[プッシュ]コマンドボタンを選択します。変更はToolsTalk 2から1つの選択されたコントローラにコピーされます。
オフラインのステータスのコントローラにプッシュを行うことはできません。
ワークスペース ウィンドウの管理
プラント構造とレポートの両方のワークスペースでは、さらに作業するための単一のコントローラの選択を行います。ワークスペースを最小化または最大化して、次の図に示すようにドラッグするか、プラント構造アイコンを選択することにより、コントローラーワークスペースのスペースを増やすことができます。

ワークスペースビューの最小化と最大化
2 つのワークスペースエリアの間の線上にカーソルを置きます。カーソルの形が白の矢印から横向きの両方向矢印に変わります。
クリックしたままドラッグすると、2 つのワークスペース領域間の境界線を移動できます。ワークスペースは、ウィンドウの境界線を左側のメニューまで移動して最大化するか、ウィンドウの境界線を右側のメニューに移動して最大化することができます。
データ グリッドのフィルター処理と並べ替え
ワークスペース ウィンドウのデータ グリッド列は、並べ替えとフィルター処理を行うことができます。
並べ替えとフィルター機能にアクセスするには、列ヘッダーを選択します。
リストを並べ替えるには、[リストの並べ替え] を選択して、リストを昇順、降順、または既定の順序に並べ替えます。
リストをフィルタするには、表示する内容をフィルタするチェックボックスをオンにします。既定のビューに戻るには、[フィルタをクリア] を選択します。
ユーザーインターフェイス - コントローラ付きワークスペースの概要
コントローラを選択してコントローラメニューアイコンを選択すると、コントローラワークスペースに次の情報が表示されます。
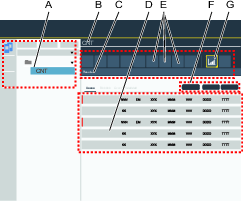
A | プラント構造ワークスペースで選択したコントローラ。 |
B | コントローラワークスペース内のコントローラ名。名前は、プラント構造で選択されたコントローラ名と同じです。 |
C | 選択したコントローラメニュー アイコンの名前 |
D | コントローラワークスペースの概要情報を含む構成のリスト |
E | コントローラメニューアイコン |
F | コントローラワークスペース内のコマンドボタンの行。コマンドボタンの種類は、選択したコントローラのメニューアイコンによって異なります。 |
G | 選択されたコントローラメニューのアイコン。黄色の枠線で強調表示 |
ワークスペースの概要には、構成のリストが表示されるか、メニューにパラメーター値が表示されます。構成のリストが表示されている場合、構成名をダブルクリックすると次のレベル、メニューレベルにアクセスできます。
[ハードウェア構成]タブの使用

ハードウェアレイアウト構成のオフラインプログラミングは、コントローラテンプレートライブラリで行います。
構成領域
設定領域では、レイアウトを最初から作成するか、コントローラから抽出した既存のレイアウトを更新することができます。
抽出 | コントローラに接続されているハードウェアに従ってハードウェアレイアウト構成を更新します。 |
ズームイン | レイアウトを拡大表示します。(Ctrl +マウスホイールを前に押す) |
ズームアウト | レイアウトを縮小表示します。(Ctrl +マウスホイールを手前に押す) |
画面に合わせる | レイアウトを既定のサイズに戻します。 |
削除 | 選択項目を削除します。 |
ツールボックス
ツールボックスには、コントローラバージョンに有効なすべての製品が含まれています。
ハードウェアレイアウトの作成
PF6システムの新規インストールにはハードウェアレイアウトはありません。
ハードウェアレイアウトを作成するには、必ずツールボックスのキャリア(3スロットまたは6スロット)から始めてください。チャンネル番号の順序については、最初に6スロットキャリアを使用することをお勧めします。2台を超えるFlexCarrierを搭載したシステムでは、6スロットのFlexCarrierを使用してハードウェア構成を開始してください。
FlexCarrierをここにドロップとされたエリアまでドラッグしてドロップします。インジケーターが表示されます。記号をポイントしてツールチップを表示させることもできます。
他の商品をツールボックスから目的の場所にドラッグします。製品で行き先の場所をポイントすると、行き先の場所の色が変わります。
赤: 無効なドロップ
青: 有効なドロップ
すべての製品を使用して、1つの製品またはキャリアを移動、コピー、および削除できます。
移動するには、製品をクリックしてドラッグします。
コピーするには、Ctrl キーを押しながら製品をドラッグします。
削除するには、製品を選択して[削除]を押します。FlexControllerを含むFlexCarrierは、それが唯一の残りのキャリアである場合にのみ削除できます。
ハードウェアレイアウト構成の抽出
[ハードウェアレイアウト構成] が空の場合は、抽出ボタンを使用して現在のコントローラ設定を抽出できます。
抽出を選択すると、ハードウェア構成の抽出 ダイアログボックスが開きます。
OKを選択して現在の構成を抽出します。
抽出後、ステータスと正常性を受け取るためにコントローラに変更をプッシュ配信します。ハードウェア展開のステータスは、検証後に変更されます。
ステータス
コントローラが接続され、オンラインであり、ハードウェアレイアウト構成がコントローラと同期している場合、ToolsTalk 2 はハードウェア展開ステータスの変更に関する通知を受信し始めます。通知があると、ToolsTalk 2はコントローラにハードウェア測定データを要求します。
詳細な展開ステータスと測定データを表示するには:
構成エリアで製品を選択します。Ctrlキーを押しながら選択すると、複数の製品を選択できます。
ステータスバーからウィンドウを展開します。
ヒント:
パネルの高さは、上の境界線をドラッグすることで増やすことができます。
最新の測定データを取得するには、 更新 をクリックします。
ヘルスステータスの詳細は展開することができます。NG 結果を含むデータのみを表示するには、NG のみ表示を選択します。
ツール構成
ツールごとに、使用可能なすべてのツール構成を含むリストからツール構成を選択することができます。既定では、ツール構成のマッピングは行われません。ツール構成にマップされていないツールを実行することは可能です。この場合、コントローラはデュアルトランスデューサー機能を有効にせずに、内部で作成された既定のツール設定を使用します。
禁止モード
チャンネル(ドライブまたはツール)に問題がある場合は、ハードウェアの使用を続けられるように禁止モードを設定できます。
否: チャンネルは正常に動作しています。
レポート OK:チャンネルが無効になり、結果としてOKと報告されます。
レポートNG: チャンネルが無効になり、結果として NG が報告されます。
レポート結果なし: チャンネルは無効になっており、結果には表示されません。
キャリア
キャリアには次の2つの種類があります:
3スロット
6スロット
構成には最大11のキャリアを含めることができます。コントローラ付きのキャリアは、常に最初のキャリアとなります。すべてのキャリアは、最初のキャリアの後にドロップする必要があります。
コントローラ
コントローラは、最初のキャリアの最初のスロットにしか追加できません。コントローラ製品をシステム内の他のスロットに追加することはできません。
ドライブ
ドライブは、最初のキャリアの最初のスロットまたはチャネル番号65のスロットを除く、すべての空きスロットに配置できます。詳細については、チャネル番号付けのセクションを参照してください。
構成には最大64のドライブを含めることができます。
空白
空白は、任意のキャリアの、最初のスロットを除くすべての空きスロットに配置できます。
ファン
ファン製品は、キャリアの上部にしか取り付けできません。3キャリアには1つのファンモジュールがあり、6キャリアには2つのファンモジュールがあります。
非常停止
非常停止には次の3種類があります:
E-Stop ASM
非常停止エントリー
非常停止バイパス
最初の2つの非常停止は、構成の最初のキャリアにのみドロップできます。他のすべてのキャリアに付けることが出来るのは、非常停止バイパスに限ります。
ツール
FlexシステムではQSTツールしか追加できません。ツールは、ツールが接続されていないドライブにのみドロップできます。
記号
記号は各製品のステータスを示します。各インジケータをポイントすると、ツールチップを取得することができます。
| 警告 |
| 予期しない |
| OK |
| 空 |
| 正しくないタイプ |
| 不足 |






チャンネルの番号付け
システムの電源を入れると、チャンネル番号(ドライブインデックスとも呼ばれます)が各FlexDriveに割り当てられます。ドライブインデックスは、FlexCarrierの種類、およびFlexCarrierのどこにFlexDriveがマウントされているかによって異なります。
例:チャンネルの番号付け
キャリア 1 | スロット1 | スロット2 | スロット3 | スロット4 | スロット5 | スロット6 |
コントローラ | ドライブ | ドライブ | ドライブ | ドライブ | ドライブ | |
ドライブインデックス | - | 2 | 3 | 4 | 5 | 6 |
キャリア 2 | スロット1 | スロット2 | スロット3 |
|
|
|
ドライブ | ドライブ | ドライブ | ||||
ドライブインデックス | 7 | 8 | 9 |
[締め付けプログラム]タブの使用
プラント構造ワークスペース
でコントローラを選択します。ツールバーで、締め付けプログラム
 を選択します。
を選択します。締め付けプログラムの概要に、締め付けプログラムのリストが表示されます。
リストには次の列があります。
列 | 説明 |
|---|---|
チェックボックス | チェックボックスにマークを付けて締め付けプログラムを選択します。 |
名前 | 締め付けプログラムの名前。プッシュインジケーター |
戦略 | 締め付けプログラムに選択されている締め付け戦略。 |
ライブラリのリンク | プログラムが、締め付けプログラムライブラリのグローバル締め付けプログラムにリンクされているかどうかを示します。 |
ターゲット | 最終締め付け目標は、トルク値または角度値で表されます。 |
最終変更 | ToolsTalk 2 時間で表される最終変更。 |
変更者 | どのユーザーが最後に変更を加えたかを示します。 |
コントローラ更新 | コントローラにプッシュされた最終変更をコントローラ時間で表します。 |
コントローラ更新者 | どのユーザーが最後にコントローラーをプッシュしたかを示します。 |
承認ステータス | 締め付けまたは緩めプログラムの承認ステータス |
変更者のフィールドは、ToolsTalk 2 GUI を介して登録されている ToolsTalk 2 ユーザーになります。
コントローラ更新者のフィールドは、Web GUI またはコントローラ GUI を介して登録される ToolsTalk 2 ユーザーになります。
コマンド | 説明 |
|---|---|
追加 | 新しい締め付けプログラムを作成します。 |
ライブラリに追加 | ローカル締め付けプログラムをグローバル締め付けプログラムに変換します。 |
リンク解除 | グローバル締め付けプログラムをローカル締め付けプログラムに変換します。 |
比較 | 選択した 2 つの締め付けプログラムを比較します。これらは同じ戦略を持っている必要があります。 |
削除 | 選択した締め付けプログラムをリストから削除します。 |
締め付けプログラムメニュー

リストの各行は、マルチステップ締め付けプログラム 1 つを表します。
ヘッダー | 説明 |
|---|---|
チェックボックス | 特定の締め付けプログラムを選択するために使用します。 |
名前 | ユーザ定義名。 |
戦略 | 締め付けプログラムに選択されている戦略。 |
ライブラリのリンク | グローバルライブラリへのリンクの有無。 |
ターゲット |
|
最終変更 | ToolsTalk 2 時間で表す時間。 |
変更者 | <ユーザー> によって変更された締め付けプログラム |
コントローラ更新 | コントローラ時間で表したコントローラ更新。 |
コントローラ更新者 | <ユーザー> によって更新されたコントローラ |
承認ステータス | 締め付けまたは緩めプログラムの承認ステータス |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
マルチステップ締め付けのはじめに
マルチステップ締め付けとは、複数のステップで行われる締め付けです。ステップ数およびステップのタイプは、行われる締め付けに応じて異なります。
たとえば、車にホイールを固定している5本のボルトを締め付けるには、通常多くのツールを使用してマルチステップの締め付けを並行して実行します。締め付けが正しく行われていることを確認するために、すべてのツールが同期して動作し、ほぼ同時に同じトルクに達するようにする必要があります。
こうした同期が確実に行われるようにするため、マルチステッププログラムでは同期点が使用されます。同期点で、各ツールは停止します。すべてのツールが同期点に到達すると、ツールは次の同期点に到達するまで次のステップに進みます。
同期点間のステップ数は柔軟で、1から10までが可能です。それぞれ異なるツール間で実行されてるマルチステップ プログラムを、同期点間で同数のステップ数にする必要はありません。マルチステップ締め付けプログラムは高度な構成が可能で、異なるマルチステッププログラムの実際のレイアウトは、それぞれ大きく異なる可能性があります。
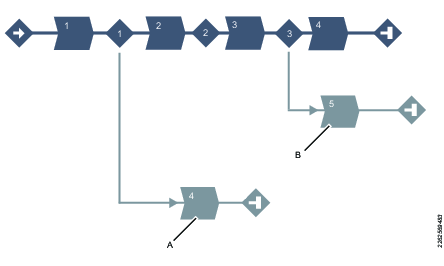
例:マルチステップ締め付けプログラム

Pos |
|
A | ステップ1と2で、ツールをボルトにはめ込みます。 |
B | ステップ3で高速ランダウンが行われます。 |
C | ステップ4と5では、実際の締め付けを実行します |
D | ステップ6を使用してボルトからソケットを外します。 |
制限
制限は、予期しない事態が発生した場合に確実に締め付けを停止させるために使用します。これらの制限では、例えば、最大トルク設定に達していないかどうか、またはマルチステップ締め付けの一部の実行に時間がかかりすぎないかどうかをテストできます。各ステップには、それぞれ最大 4 つの制限を設けることができます。
モニター
モニターは、締め付けが仕様に従って行われたかどうかを確認するために使用します。例えば、角度制限やトルク制限などの確認が可能です。各ステップには、それぞれ最大 4 つのモニターを設けることができます。
同期モード
同期モードでは、異なる締付けプログラムを異なるツールで同時に実行することができます。同期モードの主な機能は、同期締め付けに含めるツールを定義し、各ツールが実行する締め付けプログラムを指定することです。
不良品管理
締め付けプログラムで問題が発生した場合、プログラムは修復を実行するか、プログラムを終了させる事が出来ます。
不良品管理は次のように機能します。すべてのツールが同期点に達すると、各ツールのステータスと合計ステータスが評価されます。同期点のすべてのチャンネルがOK(正常)であれば、プログラムは次のステップに進みます。NGがある場合、プログラムは設定された動作に従って修復または終了します。
マルチステッププログラムの追加
追加ボタンを選択します。新しい締め付けプログラムを作成ダイアログ ウィンドウが開きます。
締め付けプログラムの名前、インデックス番号 (締め付けの場合のみ)、を入力して、締め付け戦略にマルチステップを選択します。インデックスのアクティブな選択が行われていない場合、締め付けプログラムにはプログラムリストの次の続き番号が指定されます。
追加ボタンを選択します。
締め付けプログラムのコピーと貼り付け
既存の締め付けプログラムをテンプレートとしてコピーし、別のコントローラーに貼り付けることができます。
コピーと貼り付けは、同じコントローラで実行される場合、または同じソフトウェアバージョンとコントローラタイプを実行している異なるコントローラ間で実行される場合にのみ可能です。
プラント構造
エリアでコントローラを選択します。締め付けプログラム
に移動します。ワークスペースエリアにすべての締め付けプログラムメニューが表示されます。
コピーする1つの行を右クリックするか、複数の行をコピーするには、コピーする各プログラムのチェックボックス
 をオンにしてから、右クリックします。
をオンにしてから、右クリックします。コピーを選択します。
空のワークスペースエリアの任意の場所を右クリックし、[貼り付け]を選択して、リストで最初に使用可能な位置に締め付けプログラムを追加します。または、右クリックして[インデックス付きで貼り付け]を選択し、プログラムリスト内の位置を選択します。ダブルクリックして締め付けプログラムを開き、修正します。
締め付けプログラムのテンプレートを プログラムテンプレートライブラリワークスペースに貼り付けることも可能です。
マルチステッププログラムのインポート
追加ボタンを選択します。新しい締め付けプログラムを作成ダイアログ ウィンドウが開きます。
インポートタブを選択します。
[ファイルを開く] を選択し、目的の場所からファイルを選択します。ファイルの形式は <template_name>.jsonにする必要があります。開くを選択します。
マルチステッププログラムの削除
各々の多段階プログラムを削除するには、ワークスペース領域の一番左の列にあるチェック・ボックスをマークしてください。
管理 コマンドボタンを選択し、次にドロップダウンリストから 削除 を選択します。
選択されたマルチステッププログラムが削除され、リストが更新されます。
マルチステップ締め付けプログラムの比較
締め付けプログラムでは、2つの異なるマルチステッププログラムを比較できます。
[締め付けプログラム]タブ
に移動し、プログラムの一覧で、比較する締め付けプログラムに対応するチェックボックスを選択します。締め付けと締め付け同士、緩めと緩め同士と、同じ動作モードのマルチステッププログラム同士のみを比較できます。
管理コマンドボタンを選択して、比較を選択します。
ワークスペースには、実際のマルチステッププログラムステップのグラフィック画像が表示され、比較エリアには、選択した2つの締め付けプログラムのパラメーターが表示されます。
[比較]ウィンドウでは、異なる特定のパラメーター値が赤で表示されます。差異のみを表示のチェックボックスを選択して、異なるパラメーター値のみを表示します。異なるパラメーターを含む「プロパティー」セクションと「ステップ」セクションには、青色のインジケーターが表示されます。
比較中の2つのマルチステッププログラムを編集することはできず、構成エラーまたは警告は表示されません。
グローバル締め付けプログラム
締め付けプログラムはローカルかグローバルのいずれかです。締め付けプログラムがグローバルの場合、締め付けプログラムのリストのライブラリのリンクの列にはいが示されます。
ローカル締め付けプログラムは単一のコントローラになります。
プラント構造ワークスペース
でコントローラを選択します。ツールバーで、締め付けプログラム
を選択します。締め付けプログラムの概要に、締め付けプログラムのリストが表示されます。
ローカル締め付けプログラムは締め付けプログラム タブでのみ編集できます。
ローカル締め付けプログラムは、締め付けプログラムライブラリ  には表示されません。
には表示されません。
グローバル締め付けプログラムは、締め付けプログラムに登録されている複数のコントローラに有効です。グローバル締め付けプログラムは締め付けプログラムライブラリあります。
左側のメニューバーでライブラリ
を選択します。 上部のメニューバーで締め付けプログラムライブラリ
を選択します。 締め付けプログラムライブラリに、グローバル締め付けプログラムのリストが表示されます。
コントローラがグローバル締め付けプログラムに登録されている場合、これは締め付けプログラム に表示されますが、編集はできません。
グローバル締め付けプログラムは締め付けプログラムライブラリ のみから編集できます。
締め付けエディタ
ボタン
名前 | 説明 |
|---|---|
ディスプレイ |
|
ズームイン | 締め付けプログラムを拡大表示にします。 |
ズームアウト | 締め付けプログラムを縮小表示にします。 |
画面に合わせる | ドラッグアンドドロップエリアに締め付けプログラム全体が表示されるように合わせます。 |
削除 | 選択項目を削除します。 |
修復領域
修復領域のステップは、同期点の状況がNGの場合に従うべき修復パスを示しています。
修復パスは常に同期点で開始および終了します。修復パスが再び締め付けパスに入る必要がある場所は柔軟ですが、修復パスは常にプログラムの先頭方向に戻る必要があります。
各同期点で開始できる修復パスは1つだけですが、複数の修復パスが同じ同期点で終了することは出来ます。
修復パスでは1~3ステップを実行する事が出来ます。
プログラムの開始から修復パスを定義することはできません。
例:修復パス
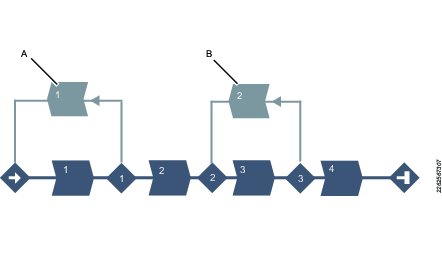
A | 最初の同期点からプログラムの開始点までのパスを修復します。 |
B | 3番目の同期点から2番目の同期点までの修復パス。 |
締め付けエリア
締め付け領域には、締め付け経路、つまり修復および終了経路を除いたマルチステップ締め付けプログラムのステップおよび同期点が含まれます。
終了エリア
終了エリアのステップは、同期点の状況が致命的である場合に、たどる終了パスを示します。終了パスが完了すると、締め付けは終了します。終了パスは常に同期点から始まります。各同期点で開始できる終了パスは1つだけです。
終了パスで実行するステップ数は、1 ~ 3 です。
いつでもすべての同期点で終了することが出来ます。終了パスが定義されていない場合、プログラムは他のステップを実行せずに直接最後まで移動します。
例:終了パス
A | 最初の同期点からプログラムの終わりまでの終了パス。 |
B | 3番目の同期点からプログラムの終わりまでの終了パス。 |
構成
ステップ、制限、またはモニターを選択し、画面の下部にある構成をクリックして構成フィールドを開きます。複数のステップを選択するには、Ctrl を使用します。
[構成] フィールドには、修復エリアでどのステップ、モニタ、または制限が選択されているかに基づいた、ステップ、モニタ、および制限に対するさまざまなパラメータが含まれます。
必要なパラメータを入力します。
モニタまたは制限を削除するには、そのフィールドに表示されている 削除を選択します。
スピードシフトの使用
ステップ中に速度が変わる、角度トリガまたはトルクトリガを1~5個定義できます。
速度シフトは、[構成] フィールドに追加できます。
1つのステップでは、すべてのスピードシフトトリガは、トルクまたは角度の同じプロパティに基づきます。1つのステップでこれを組み合わせることはできません。
スピードシフトを追加するには:
スピードシフトが使用できるステップのダイアログ ボックスで、スピードシフトの追加をクリックして、角度範囲またはトルク範囲を選択します。スピードシフトの角度/トルクのフィールドが開きます。
以下の表に従って値を追加します。
パラメータ | 説明 |
|---|---|
Angle/Torque trigger (角度/トルクトリガ) | > 0 であること。 |
速度 | > 0 であること。 |
速度ランプタイプ | ハードまたはソフト。 |
トルクトリガと角度トリガは、ステップタイプとトリガタイプに合わせて、ステップ目標より小さくなければなりません。
トルクトリガとトルク速度もツールの最大トルクと最大速度で検証されます。スピードシフト設定がツールの最大値またはステップの最大値を超えると、警告またはエラーインジケーターが示されます。
締め付けプログラムに警告が示されるとコントローラに設定をプッシュ送信できますが、締め付けプログラムにエラー(障害)インジケーターの場合はプッシュできません。
ツールボックス
ツールボックスには以下が含まれます:
ドラッグアンドドロップエリアのショートカットキー
ショートカットキー | 説明 |
|---|---|
スペースバー + カーソル | ドラッグ&ドロップエリアを移動します。 |
ドラッグアンドドロップエリアの機能
機能 | 説明 | |
|---|---|---|
|
|
|
ステップの追加 |  | ツールボックスでステップをつかみます。希望する位置にステップをドラッグします。可能な位置は水色の指示矢印で示されます。 |
___________ | __________________________ | _________________ |
ステップのマーク |  | ステップをクリックしてマークします。 |
___________ | __________________________ | _________________ |
ステップの移動 |  | ステップを移動させるには、ステップをクリックして、ボタンを押したままで動かします。 |
___________ | __________________________ | _________________ |
ステップのコピー |  | ステップをコピーするには、[Ctrl] ボタンをクリックしながら、ステップをドラッグアンドドロップします。 |
___________ | __________________________ | _________________ |
修復パスの追加 |  | 修復パーツを開始する同期点の上にステップを配置します。 |
___________ | __________________________ | _________________ |
修復ステップを追加 |  または  | 修復ステップを追加するには、修復エリアにステップを配置します。可能な位置は水色の指示矢印で示されます。 または 修復パーツを開始する同期点の上にステップを配置します。その後、ステップは修復パスの最初のステップの前に配置されます。 |
___________ | __________________________ | _________________ |
終了パスの追加 |  | 終了部分を開始する位置から同期点の下にステップを配置します。 |
___________ | __________________________ | _________________ |
終了ステップを追加 |  または  | 終了ステップを追加するには、終了エリアにステップを配置します。可能な位置は水色の指示矢印で示されます。 または 終了部分を開始する位置から同期点の下にステップを配置します。その後、ステップは終了パスの最初のステップの前に配置されます。 |
___________ | __________________________ | _________________ |
修復パスの終点を移動します。 | 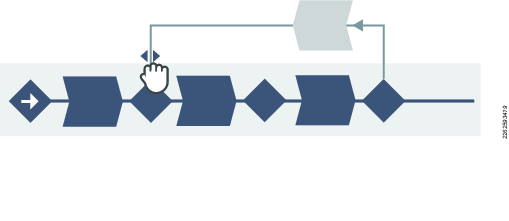 | 小さな矢印をクリックして修復パスの終点を移動します。 |
___________ | __________________________ | _________________ |
制限とモニターの追加 | 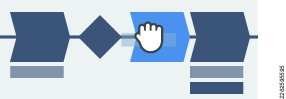 | ツールボックスで制限またはモニタをつかみます。制限またはモニタを目的のステップにドラッグします。制限またはモニタを追加できるステップは、明るい青色に変わることによって示されます。 |
___________ | __________________________ | _________________ |
禁止されている配置 | 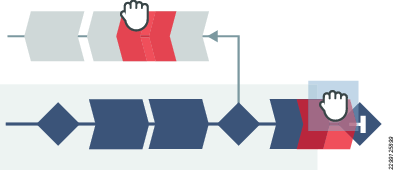 | 赤の矢印は、ステップを配置できないことを示します。 |
|
|
締め付けステップ
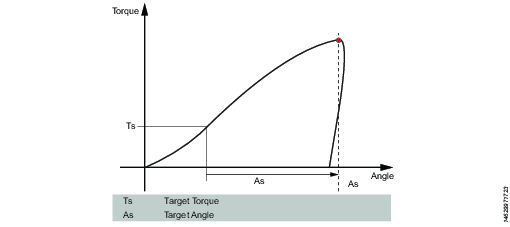
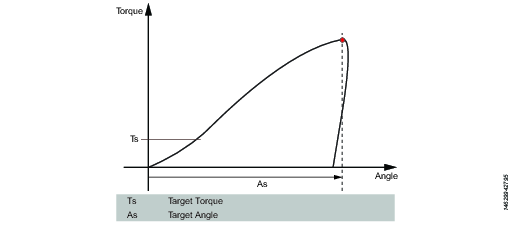
角度まで締める/緩める (A)
A – 角度に合わせて締め付け
このステップでは、目標角度に達するまでツールが作動します。目標角度は、ステップの開始から測定されます。
A - 角度に合わせて緩める
このステップは、角度目標に達するまで、ツールを逆方向に速度nで回転させます。目標角度は、ステップの開始から測定されます。
パラメーター
パラメータ | 説明 |
|---|---|
目標角度 | 目標の角度。> 0 であること。 |
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 | 既定:60 rpm。 |
T - トルクに合わせて締め付け/トルクに合わせて緩め
T - トルクに合わせて締め付け
このステップでは、目標トルクに達するまで、プログラムされた速度でツールを順方向に実行します。
パラメータ | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 | 既定:60 rpm。 |
T – トルクに合わせて緩める
このステップでは、逆方向にこの速度でツールを作動させます。ステップを有効にするには、トルクが最初に目標トルクの110%を超えている必要があります。目標トルクは正の値に設定する必要があります。目標トルクに達すると、トルクが目標トルクを下回るまでステップが実行されます。
パラメータ | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
最初のトルクで停止 | トルクが目標トルクを超えるまでステップが実行されます。目標トルクは正の値に設定する必要があります。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
T+A – トルクと角度に合わせて締め付け
このステップでは、目標トルクに達するまでツールを作動させます。この時点から、追加の目標角度まで継続して作動します。
パラメータ | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
目標角度 | 目標の角度。> 0 であること。 |
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 | 既定:60 rpm。 |
DI – デジタル入力まで実行
この手順では、[デジタル入力]で指定された入力が[停止条件]の値に応じて高または低になるまで、パラメーター方向によって定義された方向にツールを作動させます。
パラメータ | 説明 |
|---|---|
向き | 前方向または後方向 |
デジタル入力 | コントローラ上の次のローカルデジタル入力のいずれかを選択できます。
|
停止条件 |
|
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
速度 (rpm) | 既定:60 rpm。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合に使用できます。既定:500 rpm/s。 |
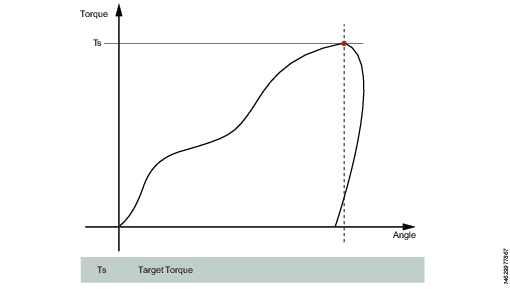
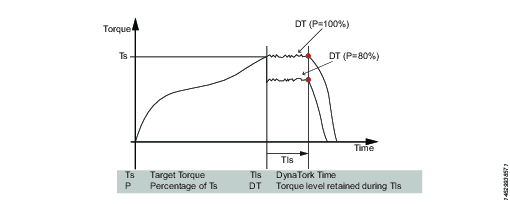
DynaTork (DT) に合わせて締め付け
このステップでは、 目標トルクに達するまで、ツールを速度nで順方向に作動させます。その後、ツールは DynaTork 時間中、目標トルクの DynaTork パーセンテージで電流を一定に保持します。
ツールの過熱を避けるため、ツールの最大トルクの 40% を超えて DynaTork を作動させないことを強く推奨いたします。
パラメータ | 説明 |
|---|---|
目標トルク | トルク目標。> 0 であること。 |
DynaTork 時間 | DynaTorkがアクティブになる時間。 |
DynaTork パーセント | トルクターゲットのパーセンテージ。 |
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 (rpm) | 既定:60 rpm。 |
待機 (W)
このステップでは、ツールは指定された時間だけ待機します。待機中はツールは回転しません。
[待機] ステップの前のステップでは、[ブレーキ] を [オン] に設定する必要があります。つまり、[待機] ステップは、ツールを停止した状態で開始する必要があります。
パラメータ | 説明 |
|---|---|
待機時間 | ツールが静止する秒数。 |
ホールドポジション | オンまたはオフ。 オンに設定されている場合、ツールは時間目標中その位置を保持します。 |
ソケット離脱 (SR)
このステップは、目標角度に達するまで、ツールを逆方向に速度nで回転させます。目標角度は、ステップの開始から測定されます。
マルチステップ締め付けプログラムの締め付けパスの最後のステップとしてのみ、このステップの使用は許可されています。ただし、このステップの後に同期点を追加することは可能です。
パラメータ | 説明 |
|---|---|
目標角度 | 目標の角度。 既定:3 度、> 0 であること |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
速度 | 既定:60 rpm。 |
トルクまたは角度に合わせて締め付け (T|A)
このステップでは、トルクターゲットまたは角度ターゲットの、いずれかに先に到達するまで、速度 n で前方向にツールを実行します。トルクと角度の測定は、ステップの最初から開始します。
パラメータ | 説明 |
|---|---|
目標トルク | > 0 であること。 |
目標角度 | > 0 であること。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
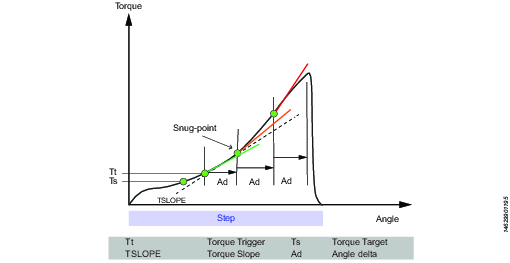
ランダウン(RD)
このステップは順方向の速度でツールを実行します。ランダウンタイプ、トルク、または着座に応じて、ステップの動作は次のとおりとなります:
ランダウンタイプ:トルクに合わせる:指定された目標トルクが見つかるとステップは停止します。
ランダウンタイプ:着座に合わせる:着座の勾配計算は、指定されたトルクトリガレベル Tt で始まります。トルクトリガが設定されていない場合は、ステップの開始時に勾配計算が開始されます。
勾配の計算は、 A d度離れた2つの角度点の間で行われ、次のように計算されます:(Tn – Tn-1)/(An – An-1)および、互いに続く2つの勾配がTSLOPEより大きくなるとすぐに 、着座点が見つかります。
パラメータ | 説明 |
|---|---|
ランダウンタイプ | トルクに合わせる または 着座に合わせる。 |
目標トルク | 既定:「設定なし」> 0 であること。 |
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
トリガートルク | ランダウンタイプが着座に合わせるである場合、[トリガートルク]フィールドが表示されます。 既定:「設定なし」> 0 であること。 |
デルタ角度 | ランダウンタイプが着座に合わせるである場合、 デルタ角度フィールドが表示されます。 既定:「0」> 0 であること。 |
トルクレート | ランダウンタイプが着座に合わせるである場合、[トルクレート]フィールドが表示されます。 既定:「0」> 0 であること。 |
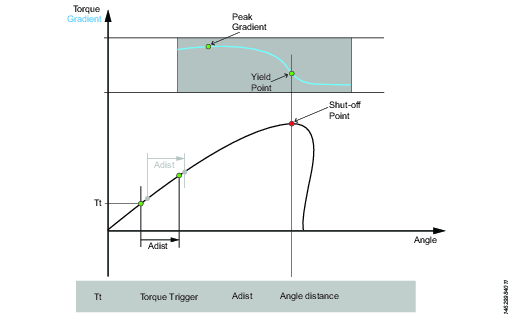
Y – 降伏に合わせて締め付け
この戦略では、降伏点が検出されるまで前方にこの速度でツールを作動します。降伏点は、トルクと角度の距離測定を基に計算されるトリガートルクレベルをトルクが超えてから、トルク勾配を監視して検出されます。角度距離パラメータは、指定されたジョイントのハードさに応じて設定されます。
勾配角度ウィンドウを設定します (ハードジョイント、ソフトジョイント、角度ウィンドウの手動設定)。手動を選択する場合、角度ウィンドウを設定する必要があります。ネジが完全なトルクまで締め付けられ、着座ポイントからさらに 30 度以下回転すると、ジョイントはハードとみなされます。ソフトジョイントは、着座ポイントまで締め付けられた後に 720 度以上回転します。ハードさのパラメータが、勾配計算の角度ウィンドウを定義します。ジョイントがハードになるほど、角度ウィンドウが小さくなります。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
トリガートルク | 角度の測定は、このトリガから開始します。> = 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
降伏点のパーセンテージ | >= 20% であること |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
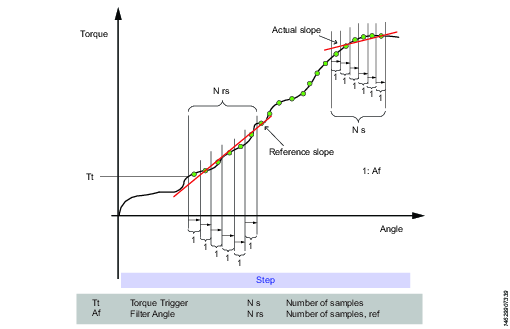
降伏点まで締める、方法 2 (YM2)
このステップでは、降伏点が検出されるまで、指定した速度でツールを順方向に実行します。
降伏点の検索は、トルクがTtに達したときに開始されます。Af度にわたるトルクの平均が計算されます。この手順はN rs回繰り返されます。
参照傾斜は、N rsにわたる線形回帰で計算されます。この後、新しい平均値は、A f の度数にかけて、継続的に計算されます。
実際の傾斜は、最後のN sの平均点にわたる線形回帰で計算されます。傾斜が参照傾斜のPy %より小さい場合、降伏点に達します。
パラメータ | 説明 |
|---|---|
目標トルク | > 0 であること。 |
フィルタ角度 | 既定:1.> 0 であること。 |
サンプル数 | 既定:6.>=4 であること。 |
pf サンプル数、基準 | 既定:6.>=4 であること。 |
降伏点のパーセント | 既定:90%。>20% であること。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
速度ランプ | 速度ランプタイプが手動の場合、このフィールドが開きます。既定:500 rpm/s。 |
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
TC – トルク較正
このステップでは、トルク目標に到達するまで、指定した速度でツールを順方向に実行します。
これをメインまたはセカンダリに設定することにより、2つのトランスデューサーのいずれか1つを校正することができます。
パラメータ | 説明 |
|---|---|
目標トルク | > 0 であること。 |
トランスデューサ | メインまたはセカンダリ。既定:メイン。 |
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
噛み合わせ (E)
このステップでは、ソケットがネジに噛み合うまで両方向にツールが作動します。ステップは、噛み合わなければ継続がはいに設定されている場合は、目標トルクまたは目標角度に達するまで継続します。いずれかの方向で目標角度に達すると、方向が反転します。噛み合わせの最大試行回数を入力すると、検索の繰り返し回数を制限できます。いずれかの方向で目標トルクに達すると、ステップは OK のステータスで終了します。
パラメータ | 説明 |
|---|---|
目標トルク | > 0 であること。 |
目標角度 | 既定:0.> 0 であること。 |
最大噛み合わせの試み | 既定:2.> 0 であること。 |
噛み合っていない場合は続行 | はいの場合、噛み合わせの試みが失敗した場合でも、ステップはステータスOKで終了します。 いいえの場合、噛み合わせの試みが失敗すると、ステップはステータスNGで終了します。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
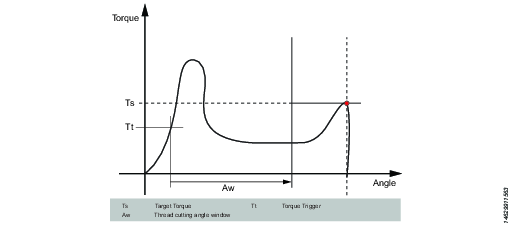
トルクに合わせてスレッドカット(ThCT)
トルクに合わせてスレッドカット機能では、必要なランダウントルクが完全なランダウントルクより大きい場合、例えば、自己ネジ切り(またはセルフタッピング)ネジを用いて金属の薄層を締め付ける際などの締め付けが可能になります。ツールは、スレッドカット角度 (Aw) に達するまで前方向に作動します。スレッドカット角度ウィンドウは、トルクがスレッドカットトリガートルク (Ttc) を初めて超える時点から測定されます。スレッドカット角度に達した点から、ステップは目標トルク (Tt) に達するまで連続して作動します。
パラメータ | 説明 |
|---|---|
目標トルク | > 0 であること。 |
スレッドカット角度ウィンドウ | 既定:0.> 0 であること。 |
トリガートルク | 角度の測定は、このトリガから開始します。 |
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
トルクと角度まで締め付け(T&A)
ツールは、目標トルクと目標角度の両方に達するまで、指定された速度で順方向に作動します。目標トルクと目標角度は 0 より大きい数値に設定する必要があります。
パラメータ | 説明 |
|---|---|
目標トルク | > 0 であること。 |
目標角度 | 既定:0.> 0 であること。 |
ブレーキ | オンの場合は、ターゲットに達したときに、ツールが停止します。 オフの場合、プログラムはツールを停止せずに直接次のステップに進みます。 |
速度 | 既定:60 rpm。> 0 であること。 |
速度ランプタイプ | ハード、ソフト、または手動。既定:ハード。[手動] を選択すると、[速度] ランプフィールドが開きます。 |
同期点
同期点では、ツールは他のすべてのツールがプログラム内の対応する同期点に到達するのを待機します。すべてのツールのステータスに応じて、プログラムは締め付けパス、修復パス、または終了パスで進行します。
同期点で待機しているツールの過熱を防ぐため、「ホールドトルク」または「ホールドポジション」は最大1秒間のみ許容されます。この後、ツールはホールドを解除し、他のツールの待機に進みます。
パラメータ | 説明 |
|---|---|
同期ホールド状態 |
|
マルチステップ締め付けプログラムで、同期点をダブルクリックするか、同期点をマークしてから、ワークスペースの下部にある 構成 を選択します。複数のマークを付けるには、 CTRLキーを押します。
構成領域で、同期ポイントごとに次のいずれかの条件を選択します。
NoHold(保持なし)。モーターがオフになり、ポジションは保持されません。
HoldPosition(位置を保持)。ツールは、前のステップが終了したときの位置を保持します。
ユーティリティ
修復パスまたは終了パスを再利用するためにコネクタを追加することができます。
コネクタを選択します。
同期点を選択します。
間違った同期点を選択した場合は、マウスの右ボタンを使用するか、Escキーを押して取り消します。
修復パスまたは終了パスにあるステップを選択します。
修復パスの逆方向または終了パスの順方向のみが選択できます。
コネクタが追加されます。
1つの同期ポイントには、1つの修復パスと1つの終了パスのみを持たせることが出来ます。
例:同じ修復パス

A | 2番目の同期点から、ステップ5と同じ修復パス。 |
B | 3番目の同期点から、ステップ5と同じ修復パス。 |
例:同じ終了パス

A | 最初の同期点から、ステップ5と同じ終了パス。 |
B | 2番目の同期点から、ステップ5と同じ終了パス。 |
ステップモニター
ステップモニターは、角度制限やトルクなど、指定に従って締め付けが行われたことを検証する際に使用されます。モニターは柔軟に設定でき、必要に応じてマルチステッププログラムに配置できます。
マルチステップ締め付けプログラムの各ステップについて、最大 4 台のモニタを設けることができます。
A – 角度
このステップモニターは、監視中に達した最大角度を測定し、それが上限と下限の間にあることを確認します。角度の測定は、モニタの開始時、または指定されている場合は、モニタ中に初めてトルクがトリガートルクを通過する時点から開始されます。
パラメータ | 説明 |
|---|---|
タイプ | 次の4種類の角度があります:ピーク角度(既定値)、ピークトルクでの角度、シャットオフ角度、および終了時の角度。 |
トリガートルク | 角度の測定は、このトリガから開始します。 |
下限 | 最小許容角度 |
上限 | 最大許容角度 |
YA – 降伏からの角度
このモニターは、降伏点から到達したピーク角度を測定し、ピーク角度が制限内であることを確認します。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
降伏点のパーセンテージ | >= 20% であること |
トリガートルク | 角度の測定は、このトリガから開始します。> 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
下限 | 最小許容角度>= 0 であること |
上限 | 最大許容角度> 0 であること |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|

MT – 平均トルク
このモニターは、モニター中に平均トルクを測定し、計算値が制限内にあることを確認します。
パラメータ | 説明 |
|---|---|
タイプ | 開始条件を指定します:
|
トルクトリガ | [タイプ] が [トリガートルク]、[角度トリガー]、または [角度ウィンドウ]に設定されている場合に使用できます。> = 0 かつ < ツール最大トルクであること。 |
角度トリガ | [タイプ] が [角度トリガー] または [角度ウィンドウ]に設定されているときに使用できます。> 0 であること。 |
角度ウィンドウ | [タイプ] が [角度ウィンドウ]に設定されている場合に使用できます。> 0 であること。
|
時間間隔 | [タイプ] が [時間間隔] に設定されている場合に使用できます。> 0 であること。 |
下限 | 最低許容トルク |
上限 | 最高許容トルク |
PT – ピークトルク
このステップモニターは、監視中に達した、オーバーシュートを含む最大トルクを測定し、それが上限と下限の間にあることを確認します。
パラメータ | 説明 |
|---|---|
下限 | 最低許容トルク |
上限 | 最高許容トルク |
PTCA – ポストスレッドカット角度
監視中に達した角度を測定し、指定の角度制限内であることを確認します。トリガートルクレベルは、スレッドカット角度ウィンドウの終了に達するまで無視されます。その後、測定トルクがトリガートルクを超えると同時に角度の測定が開始されます。停止条件のパラメータは、角度測定が終了する時点を指定します。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
スレッドカット角度ウィンドウ | > 0 であること |
角度測定タイプ | ピーク角度 ピークトルクの角度 シャットオフ角度 終了時の角度 |
スレッドカットトリガートルク | >= 0 であること |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
PTCPT – ポストスレッドカットピークトルク
オーバーシュートを含む、監視中に達した最大トルクを測定し、それがトルク制限内であることを確認します。すべてのトルク値は、スレッドカット角度ウィンドウの終了に達するまで無視されます。
パラメータ | 説明 |
|---|---|
スレッドカットトリガートルク | >= 0 であること |
スレッドカット角度ウィンドウ | > 0 であること |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
PVTH - ポストビュートルク高
このモニタは、角度ウィンドウ内のすべてのトルク値が制限値を下回っていることを確認します。
パラメータ | 説明 |
|---|---|
開始角度 | >= 0 であること |
ウィンドウ長さ | <= 0 であること |
サンプル数 | 1 |
上限 | 最高許容トルク |
PVTL – ポストビュートルク低
このモニターは、角度ウィンドウ内のすべてのトルク値が制限を超えていることを確認します。
パラメータ | 説明 |
|---|---|
開始角度 | >= 0 であること |
ウィンドウ長さ | <= 0 であること |
サンプル数 | 1 |
下限 | 最低許容トルク |
PrT - プリベリングトルク
このモニターは角度ウィンドウでのプリベリングトルク値を計算し、それが制限内であることを確認します。
パラメータ | 説明 |
|---|---|
トルク補正 | オンまたはオフ。 |
開始角度 | > 0 であること |
ウィンドウ長さ | >= 0 であること |
下限 | > 0 であること |
上限 | >= 0 であること |
SOT – シャットオフトルク
シャットオフ点は、ステップがその目標に達する点です。トルクは、シャットオフポイントで測定され、上限と下限の間にあることが確認されます。
パラメータ | 説明 |
|---|---|
下限 | 最低許容トルク |
上限 | 最高許容トルク |
SOC - シャットオフ電流
シャットオフ点は、ステップがその目標に達する点です。電流は、シャットオフポイントで測定され、上限と下限の間にあることが確認されます。
パラメータ | 説明 |
|---|---|
下限 | 最低許容電流。 |
上限 | 最大許容電流。 |
SSD - スティックスリップ検出
このステップモニターは、ステップ中のスティックスリップ効果を検出し、報告します。検出は、トルクがトリガレベルを下回った回数を数えることによって行われます。回数が 最大振動数より大きい場合、スティックスリップエラーが報告されます。モニターは、動的と固定の 2 つのモードで動作します。このモード間の違いは、トリガレベルの計算方法です。
パラメータ | 説明 |
|---|---|
スティックスリップ検出タイプ | モニタの [スティックスリップ検出] で実行する [スティックスリップ検出] の種類を指定します。既定:動的トルク |
ピークトルクのパーセンテージ | 既定:80%、>=10 かつ <100 であること。 |
トリガートルク | 既定:5、> = 0 かつ < ツール最大トルクであること。 |
最大振動数 | 既定:5、>=3 かつ <20 であること。 |
Ti – 時間
監視中の経過時間を測定し、時間制限内であることを確認します。時間の測定は、モニターの開始時に開始されるか、トリガートルクが指定されている場合は、監視中にトルクがトリガートルクを初めて超える時に開始されます。
パラメータ | 説明 |
|---|---|
トリガートルク | > = 0 かつ < ツール最大トルクであること。 |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
TC – トルク較正
このモニターは、到達した最大トルクがトルク制限内であることを確認します。
パラメータ | 説明 |
|---|---|
トランスデューサータイプ | メインまたはセカンダリ |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
TG - トルク勾配
このモニターは、勾配が制限内にあることを確認します。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
エンドポイントチェック | [はい]に設定すると、ステップのシャットオフポイントで測定された勾配のみが制限内にあるかどうかがチェックされます。 |
トリガートルク | 角度の測定は、このトリガから開始します。> 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
下限 | 最低許容トルク勾配。>= -100 であること。 |
上限 | 最大許容トルク勾配。> -100、かつ >下限である必要があります。 |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|
角度オフセット | エンドポイントチェックがいいえに設定されている場合に使用できます。トリガートルクを初めて通過した後、勾配の計算が開始する角度を指定します。 |
TAW – 角度ウィンドウのトルク
このモニタは、角度ウィンドウ内のすべてのトルク値がトルク制限内であることを確認します。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
開始角度 | > 0 であること |
ウィンドウ長さ | <= 0 であること |
下限 | >= 0 であること |
上限 | > 0 であること > 下限であること |
ウィンドウを通過した場合はNG | [はい]に設定すると、角度ウィンドウの終わりに達していない場合、このモニターのステータスはNGになります。 |
TRD – トルクレートと偏差
このステップモニターは、トルクと角度の比であるトルクレートを測定して確認します。計算されたトルクレートは、上限 と 下限 で定義されているトルクレート制限内にあることが確認されます。
パラメータ | 説明 |
|---|---|
トリガートルク | 角度の始点のトルク。 |
開始ポイント角度 | トリガートルクで開始点の角度が測定されたら、トルクの測定が開始されます。 |
終了点角度 | トルクの測定を停止する角度点。 |
終了点トルク | トルクの測定が停止されるトルク。 |
下限 | 最低許容トルク |
上限 | 最高許容トルク |
限度 | > 0 であること |
ステップ制限
予期しない事態が発生した場合に確実に締め付けを停止させるために、マルチステップ締め付けプログラムに制限を追加することができます。各制限ごとに、[修復可能] = [はい]を選択すると、締め付けが停止したときに再試行できるようになります。マルチステッププログラムの各ステップについて、最大 4つの制限を持つことができます。
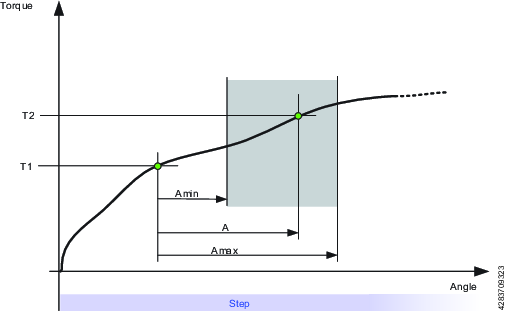
CTh – 食違いネジ
この制限は、トルクが開始トルク (T1) を超える時点から、トルクが終了トルク (T2) を超える時点までの角度を確認します。開始トルク(T1)から測定された角度が最大制限(Amax)より大きい場合、ツールは直ちに停止され、プログラムは次の同期点にジャンプします。
トルクが終了トルク (T2) を超えると、測定された角度が最小限度 (Amin) と比較して確認されます。角度がこの制限より小さい場合、ツールはただちに停止し、プログラムは次の同期点にジャンプします。
パラメータ | 説明 | 図中 |
|---|---|---|
開始トルク | <=0 であること。 | T1 |
終了トルク | <=0 であること。 | T2 |
最小限度 | 角度の下限。 | Amin |
最大限度 | 角度の上限。 | Amax |
A – 最大角度
角度を測定する制限です。測定角度が最大限度に達した場合、ツールは直ちに停止し、プログラムは次の同期点にジャンプします。角度は制限の開始から測定されるか、指定されている場合は、制限中にトルクがトリガトルクを初めて超える時に開始されます。
パラメータ | 説明 |
|---|---|
トリガートルク | 指定されている場合、これは角度が測定されるトルクです。 |
最大限度 | この限界に達すると、ツールはすぐに停止し、プログラムは次の同期点にジャンプします。 |
T - 最大トルク
この制限はトルクをチェックします。測定トルクが最大限度を超えた場合、ツールは直ちに停止し、プログラムは次の同期点にジャンプします。
パラメータ | 説明 |
|---|---|
最大限度 | トルクがこの指定された制限に達すると、ツールは直ちに停止し、プログラムは次の同期点にジャンプします。 |
RH — リヒット
この制限はトルクをチェックします。測定されたトルクがトルク限度を超えた場合、ツールは直ちに停止し、プログラムは次の同期点またはプログラムの最後にジャンプします。
パラメータ | 説明 |
|---|---|
トルク限度 | トルクが指定限度に達した場合、ツールは直ちに停止し、プログラムは次の同期点またはプログラムの最後にジャンプします。 |
RT - トルクの無効化
この制限はトルクをチェックします。測定されたトルクが限界トルク下限より低い場合、ツールは直ちに停止され、プログラムは次の同期点、またはプログラムの終わりにジャンプします。
パラメータ | 説明 |
|---|---|
トルク限度の解除 | 既定:10 Nm。> 0 であること。 |
TG - トルク勾配
この制限は勾配を確認し、それが限度の範囲外の場合、ツールが直ちに停止され、プログラムは次の同期ポイントまたはプログラムの最後にジャンプします。
パラメータ | 説明 |
|---|---|
勾配角度ウィンドウ | 角度ウィンドウの指定:
|
角度ウィンドウ | 勾配角度ウィンドウが手動に設定されている場合に使用可能です。>0 かつ <=100 でなければなりません。 |
トリガートルク | > 0 かつ < ツール最大トルクであること。 |
制振 | 勾配が計算される頻度。> 0、かつ < 100、かつ < 角度ウィンドウである必要があります。 |
最小限度 | >= -100 であること。 |
最大限度 | > -100、かつ >下限である必要があります。 |
トルクフィルタータイプ | フィルターのタイプ:
|
カットオフ周波数 | [トルクフィルタタイプ] が [ローパス] に設定されている場合に指定する必要があります。
|
サンプル数 | [トルクフィルタタイプ] が [スライド平均] に設定されている場合に指定する必要があります。
|

TAW – 角度ウィンドウのトルク
この制限は、角度ウィンドウで測定されたトルクがその制限内であることを確認します。測定されたトルクが限度範囲外の場合、ツールは直ちに停止し、プログラムは次の同期点またはプログラムの最後にジャンプします。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
開始角度 | >= 0 であること |
ウィンドウ長さ | > 0 であること |
最小限度 | >= 0 であること |
最大限度 | < = 最小値であること |
TCD - トルクと電流の偏差
制限は、該当するトルクに変換されたすべての電流測定が、トルクトランスデューサで測定された実際のトルクからの差が最大偏差であることを検証します。制限は、ステップ中にトルクが初めてトリガートルクに達すると開始され、ステップがその目標に達するまで有効です。
トリガトルクに達しない場合は、モニターは OK を報告します。
パラメータ | 説明 |
|---|---|
トリガートルク | >= 0 であること |
最大偏差 | 既定:1、> 0であること |
結果レポーター
結果レポーターを使用すると、選択した生成元の特定の値を結果から抽出できるようになります。結果レポーターはステップに属しますが、値を読み取るモニター/制限に関連付ける必要があります。結果レポーターと同じステップにあるモニターまたは制限のみを選択できます。結果レポーターはドラッグ・アンド・ドロップを使用して(モニターや制限と同じ方法で)ステップに追加します。各結果レポーターは、特定の結果値(ランダウン角度、最終トルク、プリべリングトルクなど)を報告する役割を担います。
結果レポーターは以下に関連付けることが可能です:
プログラムモニター
ステップモニター
ステップ制限
各結果レポーターは、最終的な値のタイプを定義します:
FA - 最終角度
FC – 最終電流
FT – 最終トルク
PT - プリベリングトルク
RA – ランダウン角度
ST – セルフタップトルク
一般パラメーター
パラメータ | 説明 |
|---|---|
生成元 | 値を生成するモニター/制限を指定します。 |
値 | 選択した生成元で表示する値を指定します。 |
制限事項:
メインパスのステップまたはプログラムモニター/プログラム制限に属するモニター/制限にのみ、結果レポーターを追加することが可能です。
タイプが異なる場合、ステップに複数のレポーターが存在する場合があります。
たとえば、すべてのステップおよびプログラムモニター角度に、タイプ最終角度の結果レポーターが存在する場合があります。
複数の結果値を持つモニター/制限において、結果レポーターのタイプが異なる場合は、複数の結果レポーターを追加する事が可能です。
ステップ中またはプログラムモニター/制限中には、同じタイプの結果レポーターが複数存在しない場合があります。
存在する最終値タイプ当たりレポートされる結果は 1 つのみです。
ルール:
結果アイテムの内部番号は、対応する結果レポーターの内部番号と同じである必要があります。
モニタ/制限の結果の内部番号は、構成内のモニタ/制限の内部番号と同じである必要があります。
ステップの結果は、実行の順序に従って順序付けする必要があります。最初に実行されるステップは最初に配置する必要があります。
モニター/制限/ステップに存在する場合、結果レポーターによって報告され得る値:
モニター/制限の測定値(浮動小数点または整数)
モニター/制限の上限と下限
ステータス
トルクトリガーと角度トリガー
角度目標とトルク目標(ステップから読み取り)
ステータスの可能な値:
低
OK
高
その他
未設定
目標値はどのステップモニターにも属さないため、目標値はモニターが属するステップから取得されます。
マルチステップテンプレート
作成されたすべてのテンプレートは、マルチステッププログラムを作成するときに、タブテンプレートに表示されます。テンプレートは挿入 (ドラッグアンドドロップ) でき、新しいマルチステッププログラムを構築する基盤となります。
テンプレートは、ステップが追加されていないときに限り、マルチステッププログラムにドラッグできます。マルチステッププログラムにテンプレートをドラッグすると、ステップを追加できます。
マルチステップ締め付けプログラムを変更しても、テンプレートはプログラムにリンクされているのではなく、コピーされているので、テンプレート自体には影響しません。
ライブラリ> プログラムテンプレートでマルチステッププログラムテンプレートを作成します。
マルチステップ締め付けプログラムのプロパティ
パラメータ | 説明 |
|---|---|
名前 | マルチステッププログラムのユーザ定義名。 |
説明 | マルチステッププログラムの説明。 |
タイプ | 固定などの締め付けのタイプを設定します。 |
ねじ方向 | 時計回り (CW) または反時計回り (CCW) 。通常、この方向は時計回りです。 |
プログラムの制限
パラメータ | 説明 |
|---|---|
最大時間限度 | 秒で設定します。この制限は、締め付けの合計時間を確認し、最大時間限度の限度を超えると、ツールは直ちに停止します。時間は、プログラムの開始から測定されます。 |
最大トルク限度 | 値を設定します。この制限は、トルクを確認し、測定されたトルクが最大トルク限度の限度を超えると、ツールは直ちに停止します。 |
プログラムモニター
パラメータ | 説明 |
|---|---|
角度 | プログラム全体での角度監視をオンまたはオフにします。ステップでアクティブとトリガートルクを空白にすると、プログラムの開始時に角度監視が始まります。 |
ステップでアクティブ | 角度監視を有効にするステップの範囲を設定します。終了ステップが指定されていない場合、角度監視はソケット解除ステップではない、プログラムの最後のステップで終了します。 |
タイプ | 角度監視のタイプ:
|
トリガートルク | 角度監視のトリガートルクの値を設定します。 |
下限 | 角度監視(プログラム)の下限を設定します。 |
上限 | 角度監視(プログラム)の上限を設定します。 |
パラメータ | 説明 |
|---|---|
トルク | プログラム全体でのトルク監視をオンまたはオフにします。ステップでアクティブを空白にすると、プログラムの開始時にトルク監視が始まります。 |
ステップでアクティブ | トルク監視を有効にするステップの範囲を設定します。終了ステップが指定されていない場合、トルク監視はソケット解除ステップではない、プログラムの最後のステップで終了します。 |
タイプ | 角度監視のタイプ:
|
下限 | トルク監視(プログラム)の下限を設定します。 |
上限 | トルク監視(プログラム)の上限を設定します。 |
確認
パラメータ | 説明 |
|---|---|
ツール値に対する検証 | ツールがわかっている場合にはオンを使用し、最大トルクと最高速度を設定します。 ツールがわかっていない場合にはオフを使用します。 |
ツール | 検証するツールを選択するためのドロップダウン。 |
最大トルク | 検証に使用するツールの最大トルク。 |
最大速度 | 検証に使用するツールの最大速度。 |
アッタチメントの調整
パラメータ | 説明 |
|---|---|
アタッチメント調整を使用 | 添付ファイルのチューニングをオンまたはオフにするかどうかを選択します。 |
変速比 | 変速比値は 0.5 ~ 4.0 の間が可能です。 |
効率の調整 | 効率の調整値は0.5~1.0の間が可能です。 |
レポーター
これにより、ユーザーは(モニター/制限から)どの値を最終値として表示するかを選択できます。[追加]をクリックして、プログラムモニター/制限値に関連付ける結果レポーターを選択します。
パラメータ | 説明 |
|---|---|
レポーター | 結果レポーターを選択します。 |
生成元 | 値を生成するモニター/制限を選択します。 |
値 | 選択した生成元で表示する値を選択します。 |
[同期モード] タブの使用
同期モードは、次の目的で使用されます:
同期締め付けまたは緩めに含まれるツールを定義する
各ツールが実行する締め付けまたは緩めプログラムを指定する
拒否管理の処理(締め付け同期モードのみに有効)
同期モードは、固定式ソリューションのさまざまなツールが同時にさまざまなマルチステッププログラムを実行できるようにします。
柔軟な生産ラインでは、新製品ごとに異なる同期モードを使用する必要もあります。Sync Mode機能を使用すると、構成ごとにモードを設定できます。
各行は1つの同期モードを表します。列には次の情報が含まれます。
列 | 説明 |
|---|---|
チェックボックス | 例えば、同期モードを削除するときなどに使用されます。 |
名前 | 締め付け同期モードの場合、各名前はインデックス番号で始まり、その後にユーザー定義の名前が続きます。緩め同期モードには、ユーザー定義の名前のみが含まれます。 |
チャンネル | Sync Modeのチャンネル数。 |
最終保存 | ToolsTalk 2 時間で表される最終変更。 |
最終保存者 | 構成データを保存したユーザーを表示します。 |
コントローラ更新 | コントローラが更新された時刻。コントローラの時刻で表されます。 |
コントローラ更新者 | コントローラを最後に更新したユーザー。 |
Sync Modeの追加
プラント構造
でコントローラを選択します。メニューバーで同期モードアイコン
 を選択します。ワークスペースエリアには、現在のすべての同期モードのリストが表示されます。
を選択します。ワークスペースエリアには、現在のすべての同期モードのリストが表示されます。 [追加]コマンドボタンを選択し、名前とインデックスを入力します(締め付け同期モードにのみ有効)。
[操作モード]ドロップダウンで[締め付け]または[緩め]を選択します。
新しい同期モードが最下位の位置に追加され、リストが更新されます。
同期モードの削除
プラント構造
でコントローラを選択します。メニューバーで同期モードアイコン
を選択します。ワークスペースエリアには、現在のすべての同期モードのリストが表示されます。 削除する各同期モードに、ワークスペースエリアの左端列のチェックボックスをオンにします。
管理 を選択し、次にドロップダウンメニューから 削除 を選択します。
選択した同期モードが削除され、リストが更新されます。
締め付け同期モード構成の処理
締め付け同期モードをダブルクリックして、その同期モードを構成します。
プロパティ
パラメータ | 説明 |
|---|---|
名前 | モードのユーザー定義名。 |
説明 | モードの説明。 |
緩め同期モードの参照
締め付け同期モードは緩め同期モードにリンクすることができます。緩め同期モードの参照は、締め付け同期モードのプロパティメニューにあります。
[緩め同期モード]ドロップダウンから関連する緩め同期モードを選択します。
締め付け同期モードのボルト構成で使用されるボルト構成の数とチャネルの数は、選択した緩め同期モードと同じである必要があり、異なる場合は警告が表示されます。
締付不良管理(リジェクトマネジメント)
パラメータ | 説明 |
|---|---|
最大失敗ステップ数 | 全体の締め付け中に失敗を許容するステップの最大数を指定します。同じステップが2回以上失敗しても、1つの失敗したステップとしてカウントされます。 |
超えた場合の対処 | 失敗したステップの最大数を超えた場合のアクションを指定します。 |
修復中に NG が発生した場合の対処 | 修復の進行中に新しいエラー(NG)が検出された場合の処置を指定します。 |
トリガ
同期点テーブルを表示するには、ボルト構成の少なくとも1つのボルトに対して同期点を使用した締め付けプログラムを選択する必要があります。
プログラムのメインパス内の同期点ごとに、不良品管理を制御するためにさまざまなトリガを指定することができます。
トリガの追加
[トリガの追加] の横にある [+] アイコンをクリックします。
トリガを選択します。
同期点ごとにアクションを設定します。
トリガの削除
[トリガの追加] の横にある [+] アイコンをクリックします。
削除するトリガの横にある削除アイコンをクリックします。
既定のトリガパラメータ | 説明 |
|---|---|
同期点 | 選択した締め付けプログラムの同期点。 |
失敗の規定値 | エラーが検出された場合の主な動作を指定します。他の条件がどれも満たされていない場合に使用されます。 |
失敗の規定値その他 | このパラメータは、[終了] または [終了] を実行していないツールに対するアクションを定義します。 |
修復回数パラメータ | 説明 |
|---|---|
修復 | 同期点から開始できる修復の最大数を指定します。設定されていない場合は、無制限の回数の修復を行うことができます。 |
修復アクション | 修復の最大数が行われ、新しいエラーが発生した場合のアクションを指定します |
修復アクションその他 | このパラメータは、[終了] または [終了] を実行していないツールに対するアクションを定義します。 |
NGチャンネルパラメータ | 説明 |
|---|---|
NG チャンネル | 同期点で失敗を許容する最大チャンネル数を指定します。設定されていない場合、失敗したチャンネルの数の設定は、アクションを決定するために使用されることはありません。 |
NG チャンネルアクション | 同期点でNG チャンネルを超えた数の失敗がある場合のアクションを指定します。 |
NG チャンネルその他 | このパラメータは、終了 NG または終了 NG を実行していないツールに対するアクションを定義します。 |
NGグループパラメータ | 説明 |
|---|---|
NG グループ | 同期点で失敗を許容するグループの最大数を指定します。設定されていない場合は、失敗したグループの数の設定がアクションの決定に使用されることはありません。 |
NG グループ操作 | 同期点でNGグループを超えるグループ数が失敗した場合のアクションを指定します。 |
その他の NG グループ | このパラメータは、終了 NG または終了 NG を実行していないツールに対するアクションを定義します。 |
修復不可能なパラメータ | 説明 |
|---|---|
修復不可能 | 同期点の合計状況が修復不可能である場合の処置を指定します。 |
NG修復可能その他 | このパラメータは、[終了] または [終了] を実行していないツールに対するアクションを定義します。 |
ボルト構成
ボルト構成を追加するには、追加または多数を追加をクリックします。ボルト構成は最大 64 個まで設定できます。
パラメータ | 説明 |
|---|---|
チェックボックス | たとえば、チャンネルを削除するときに使用されます。 |
チャンネル | チャンネルの番号。ドライブインデックスとも呼ばれます。 |
締め付けプログラム | 締付けプログラム メニューで定義された締め付けプログラムを選択します。 |
ボルト | 締め付け時に締め付けられる実際の留め具。この番号は、フィールドバス信号ボルト締め状態など、特定のボルトのデータを収集する際のアドレスとして使用されます。 |
ボルト名(オプション) | ボルトの名前。 |
グループ | 修復グループは、修復を実行するときに互いに依存するボルトをグループ化するために使用されます。1つのチャンネルは、どれも、ゼロまたは、1つ以上の修復グループに属することができます。 |
不良品管理
不良品管理機能は、自動修復または失敗したステップの終了に使用されます。各同期点では、締め付けの状態が評価されます。ステータスがOKの場合、締め付けプログラムの次の部分が始まります。ステータスがNGの場合は、締め付けプログラムを修復、中止、または終了するための措置が取られます。
各同期点からの修復パスは、締め付けプログラムの修復エリアで定義されています。
各同期点からの終了パスは、締め付けプログラムの終了エリアに定義されています。
同期点の状態
すべてのツールが同期点に達すると、各ツールのステータスと全体のステータスが評価されます。
OK | NG | 修復不可能 | 致命的 | |
|---|---|---|---|---|
ツールのステータス | これまでのところすべてが OK です。 | 同期点の前のステップには、モニターによって検出されたエラーがあります。これらのエラーについては、修復が可能です。 | 同期点の前のステップに、制限によって検出されたエラーがあります。 | 同期点の前のステップに致命的なエラーがあります。その理由は次の可能性があります: |
修復グループのステータス | 修復グループ内のすべてのツールは、ステータスOKで同期点に到達しました。 | 修復グループ内の少なくとも1つのツールが、ステータスNGの同期ポイントに到達しました(ステータスが修復不可能または致命的になったものはありません)。 | 修復グループ内の少なくとも1つのツールが、ステータス[修復不可能](およびステータスが[致命的]のものが無く)同期点に到達しました。 | 修復グループ内の少なくとも 1 つのツールが、ステータス致命的で同期ポイントに到達しました。 |
合計ステータス | すべてのツールがステータスOKで同期点に到達しました。プログラムの実行は締め付けの次のステップに進みます。 | 少なくとも1つのツールが、ステータスがNGの同期ポイントに到達しました(ステータスが修復不可能または致命的になったものはありません)。 | 少なくとも1つのツールがステータス[修復不可能]で同期ポイントに到達しました(ステータスが[致命的]になったものはありません)。 | 少なくとも1つのツールが、致命的のステータスで同期ポイントに到達しました。 |
同期点の合計ステータスがNGの場合のアクションを計算する
同期点での合計ステータスがNGの場合に適用可能な処置が計算されます。アクションは、設定されたトリガによって決まります。実行される最初のトリガは、実行するアクションを決定します:
失敗したステップの最大数を超えました:
締め付け全体における失敗したステップの合計数が失敗したステップの最大数を超えると、[超過時のアクション]が使用されます。同じステップが複数回失敗した場合、1 つの失敗したステップとしてカウントされます。修復の最大数を超えました:
現在の同期点から開始された修復の合計数が修復数トリガの修復数を超えると、修復アクションが使用されます。失敗したグループの最大数:
失敗したグループ(ステータスがNGグループ)の数がNG チャンネル数のNGグループの数を超えると、NGグループアクションが使用されます。失敗したツールの最大数:
失敗したツール(ステータスがNGのツール)の数が、NGグループの数のNGチャンネル数を超えると、NGチャンネルアクションが使用されます。デフォルト失敗アクション:
上記のいずれの条件も満たされない場合は、デフォルト失敗アクションの設定が使用されます。
修復を実行するアクション
修復を実行するツールは、修復パス内のステップを実行して前の同期点に戻ります。修復は、修復を開始した同期ポイントにプログラムが戻るまで継続されます。修復が完了すると、ツール、修復グループ、および合計ステータスが再び評価されます。合計ステータスがOKになった場合、すべてのツールは次の手順に進みます。それ以外の場合は、新しい修復または中止が開始されます。
修復を実行していないツールは現在の同期点にとどまり、修復が完了するのを待ちます。
ステータスに対するアクション | 合計ステータス NG |
|---|---|
修復 NG | ステータス NG のすべてのツールが修復を実行します。修復を実行していないツールは現在の同期点にとどまり、修復が完了するのを待ちます。 |
NG グループの修復 | ステータスがNGの修復グループに属するすべてのツールは修復を実行します。修復グループ内のすべてのツールは、個々のステータスに関係なく修復を実行します。修復を実行していないツールは現在の同期点にとどまり、修復が完了するのを待ちます。 |
すべて修復 | すべてのツールは、ステータスに関係なく、修復を実行します。 |
中止を実行するアクション
中止を実行するツールは、その中止パスでステップを実行します。その後、締付けはステータスNGで完了します。
ステータスに対するアクション | 合計ステータス NG | 合計ステータス修復不可 |
|---|---|---|
NG を終了 | ステータスがNGのツールはすべて中止を実行します。 | ステータスがNGまたは修復不可のツールはすべて終了します。 |
NG グループの中止 | ステータスがNGの修復グループに属するすべてのツールは中止を実行します。修復グループ内のすべてのツールは、個々のステータスに関係なく中止を実行します。 | ステータスがNGまたは修復不可の修復グループに属するすべてのツールは中止を実行します。修復グループ内のすべてのツールは、個々のステータスに関係なく中止を実行します。 |
全てを中止 | すべてのツールは、そのステータスに関係なく、中止を実行します。 | |
ステータスがOKのツールは、その他の設定に従って続行されます。
- 続行、他のツールは、中止が完了するまで現在の同期ポイントで待機します。その後、締め付けプログラムの残りの部分を続行します。
- すべて終了、他のツールは締め付けを終了します。
締め付けプログラムを終了するアクション
締め付けプログラムを終了するツールは、他の手順を実行せずに直接最後に移動します。その後、締付けはステータスNGで完了します。
ステータスに対するアクション | 合計ステータス NG | 合計ステータス修復不可 |
|---|---|---|
NG を終了 | ステータスが NG のすべてのツールは、中止パスを実行せずに締め付けを終了します。 | ステータスが NG または修復不可能のすべてのツールは、終了パスを実行せずに締め付けを終了します。 |
NG グループを終了 | ステータスが NG の修復グループに属するすべてのツールは、中止パスを実行せずに締め付けを終了します。修復グループのすべてのツールは、個々のステータスに関係なく締め付けを終了します。 | ステータスがNGまたは修復不可の修復グループに属するすべてのツールは、中止パスを実行せずに締め付けを終了します。修復グループのすべてのツールは、個々のステータスに関係なく締め付けを終了します。 |
すべて終了 | すべてのツールは、ステータスに関係なく、中止パスを実行せずに締め付けを終了します。 | |
ステータスがOKのツールは、その他の設定に従って続行されます。
- 続行: その他のツールは締め付けプログラムの残りの部分で続行します。
- 全てを中止: その他のツールは中止を実行します。
全ステータスが致命的である場合のアクション
合計ステータスが致命的である場合、修復は許可されません。ステータスが致命的であるツールはこれ以上実行できないため、締付けが終了します。他のツールは、個々のステータスに関係なく終了します。
ボルトの1つがNGであるが、締め付けプログラムで修復アクションが構成されていない場合、モードはすべて終了します。NG ではそのボルトのNGの主な原因が表示されます。
ボルトの1つがNGで、修復パスがある場合、システムはNGボルトで最大制限時間に達するまで修復を試みます。OK である他のボルトは、待機します。n 回の修復後にボルトが OK になった場合、プログラムは上記の箇条書きの最初の通り、すべてのボルトで続行されます。それでもボルトがOKにならない場合は、箇条書き2つ目の通り、同期モード全体が終了します。
緩め同期モード構成の処理
緩め同期モードをダブルクリックして、その同期モードを構成します。
パラメータ | 説明 |
|---|---|
名前 | モードのユーザー定義名。 |
説明 | モードの説明。 |
ボルト構成
緩め同期モードのボルト構成は、緩めマルチステッププログラムにのみリンク可能で、使用可能な緩めマルチステッププログラムのみをリストします。
ボルト構成を追加するには、追加または多数を追加をクリックします。ボルト構成は最大 64 個まで設定できます。
パラメータ | 説明 |
|---|---|
チェックボックス | たとえば、チャンネルを削除するときに使用されます。 |
チャンネル | チャンネルの番号。ドライブインデックスとも呼ばれます。 |
緩めプログラム | 締め付けプログラム メニューで定義された緩めマルチステッププログラムを選択します。 |
緩め同期モードの実行
緩め同期モードは、次の方法で実行できます。
上記のすべてのケースで正しく機能するためには、締め付けを開始するためのすべての条件が満たされている必要があります(例:非常停止なし、信号の有効化が設定されているなど)。
緩め選択入力を使用した緩め同期モードの実行
関連する緩め同期モードのある締め付け同期モードを選択します。
これは、フィールドバスとソフトPLC
にある [フィールドバス] サブタブの [送信先コントローラ] 領域の I/O 信号の選択入力に ID 10020 を追加することによって行うことができます。または、[仮想ステーション] タブ の [タスク] でタスクを選択することによっても実行できます。
の [タスク] でタスクを選択することによっても実行できます。
フィールドバスとSoftPLC
にある[フィールドバス]サブタブの[送信先コントローラ]領域でI/O信号 緩め選択、ID 10029 を選択します。次の2つの信号のいずれかを使用して緩めを開始します。
駆動開始(連続)、ID 10028
駆動開始(パルス)、ID 10113
緩め開始入力を使用した緩め同期モードの実行
締付け同期モードと関連する緩め同期モードを選択します。
これは、フィールドバスとソフトPLC
にある [フィールドバス] サブタブの [送信先コントローラ] 領域の I/O 信号の選択入力に ID 10020 を追加することによって行うことができます。または、[仮想ステーション] タブの [タスク] でタスクを選択することによっても実行できます。
次の2つの信号のいずれかを使用して緩めを開始します。
緩め開始 (連続)、ID 10011
緩めパルス開始 (パルス)、ID 10072
同期モードのコピーと貼り付け
既存の同期モードは、同じコントローラーにコピーして貼り付けるか、1つのコントローラーからコピーしてから別のコントローラーに貼り付けることができます。
コピーと貼り付けは、同じコントローラーで実行される場合、または同じソフトウェアバージョンとコントローラータイプを実行している異なるコントローラー間で実行される場合にのみ可能です。
メニューバーで、同期モード
 タブを選択します。ワークスペースには、使用可能な同期モードのリストが表示されます。
タブを選択します。ワークスペースには、使用可能な同期モードのリストが表示されます。次のいずれかの方法で同期モードをコピーします。
コピーする[同期モード]を右クリックしてメニューから[コピー]を選択します。
または、各行の前にあるチェックボックスをオンにして複数の同期モードを選択し、右クリックして、メニューから[コピー]を選択します。
プラント構造
で、同期モードを貼り付けるコントローラを選択します。メニューバーで、[同期モード]タブを選択します。次にワークスペースエリアの任意の場所を右クリックして[貼り付け]を選択します貼り付けられた同期モードは、リストの最初の使用可能な位置に追加されます。
使用可能なスロットがない場合、同期モードがリストの一番下に追加され、使用可能な最小のインデックス番号が割り当てられます。インデックス番号を変更して順序を変更することはできません。(この操作は、締め付け同期モードでのみ有効です)
同期モードを貼り付けると、接続されたマルチステップ締め付けプログラムも含まれます。このマルチステップ締付けプログラムに接続されている緩め同期モードは、デフォルトではコピーされません。すでに最大数に達しているため、マルチステップ締め付けプログラムをインポートするスペースがない場合、貼り付け操作全体が失敗します。
同期モードのエクスポート
同期モードは、1つのコントローラからエクスポートし、別のコントローラにインポートできます。
エクスポートとインポートは、同じコントローラーで実行される場合、または同じソフトウェアバージョンとコントローラータイプを実行している異なるコントローラー間で実行される場合にのみ可能です。
プラント構造
で、リストからコントローラを選択します。メニューバーで、同期モード
タブを選択します。ワークスペースエリアには、現在のすべての同期モードのリストが表示されます。エクスポートする同期モードのチェックボックスを選択します。
管理 を選択し、ドロップダウンメニューからエクスポート を選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
デフォルトのファイル名は<SyncModeName>.jsonです。エクスポートされたファイルには、*.json 拡張子を持つ任意の名前を付けることができます。
保存 を選択します。
同期モードのインポート
同期モードは、1つのコントローラーからエクスポートし、別のコントローラーにインポートできます。
エクスポートとインポートは、同じコントローラーで実行される場合、または同じソフトウェアバージョンとコントローラータイプを実行している異なるコントローラー間で実行される場合にのみ可能です。
プラント構造
で、リストからコントローラを選択します。メニューバーで、同期モード
タブを選択します。ワークスペースエリアには、現在のすべての同期モードのリストが表示されます。 追加コマンドボタンを選択して、インポートを選択します。
[ファイルを開く]を選択し、関連する .json ファイルを参照して選択します。
追加を選択します。
同期モードをインポートすると、接続されたマルチステップ締め付けプログラムも含まれます。すでに最大数に達しているため、マルチステップ締め付けプログラムをインポートするスペースがない場合、貼り付け操作全体が失敗します。
[バッチシーケンス]タブの使用
バッチシーケンスタスクは、仮想ステーションのタスク構成または外部入力ソースで選択されます。
締め付け順序は、固定スキームに従うか、オペレーターに任せて自由順序スキームかのいずれかを決定することができます。いずれの場合も、ソケットまたは信号を使用して、コントローラとオペレータの間の通信を行うことができます。
バッチは何度も繰り返される 1 つの締め付けプログラムで構成されています。
バッチシーケンスは、操作にバッチ/締め付けプログラムの組み合わせが必要な場合の、順序の指定されたバッチのセットです。
プラント構造
でコントローラを選択します。 バッチシーケンス
 に移動します。
に移動します。
列には次の情報が含まれます。
列 | 説明 |
|---|---|
名前 | 各バッチシーケンス名は、インデックス番号で始まります。それに続く文字は、任意のユーザー定義名に変更することが可能です。 |
最終変更 | ToolsTalk 2 時間で表されます。 |
最終変更者 | <ユーザー> によって最後に変更された構成データ。 |
コントローラ更新 | コントローラ時間で表します。 |
コントローラ更新者 | <ユーザー> によって更新されたコントローラ。 |
変更者とコントローラー更新者のフィールドは、ToolsTalk 2インターフェースで作成された登録ToolsTalk 2 ユーザーになります。
コマンド | 説明 |
|---|---|
管理 |
構成を削除すると、構成のリストのインデックス番号に異常が示されます。インデックス番号は変更されません。新しい構成を追加すると、構成に空いているインデックスの最下位が検索されます。 |
追加 | 新しいバッチシーケンスを作成またはインポートします。 |
バッチシーケンス名は、インデックス番号とオプションの文字の組み合わせです。インデックスの位置は変更できません。新しい構成には、一番小さい使用可能なインデックス番号が指定されます。インデックス番号は、タスクの選択プロセスの一部にソース番号と ID 番号を使用する際に重要です。
バッチシーケンスの構成ワークスペース
バッチシーケンスの構成ワークスペースには、次の構成メニューで単一のバッチシーケンスの詳細が示されます。
基本設定: 構成名と説明を使用。
一般設定: 締め付けの流れと順番を制御。
シーケンス構成: 個別の締め付けプログラムからバッチシーケンスを作成。
プラント構造ワークスペース
でコントローラを選択します。メニューバーでバッチシーケンス
を選びます。メニューを表示するバッチシーケンスの名前をダブルクリックします。
バッチシーケンスの構成メニュー
プロパティメニューのオプションは次の通りです:
パラメーター名 | 説明 |
|---|---|
名前 | 既定名バッチシーケンス。これは編集可能です。 |
説明 | バッチシーケンスに対して発行される説明(オプション)。 |
バッチシーケンス完了時にツールをロック | オン: バッチシーケンスが完了するとツールがロックされます。 オフ: バッチシーケンスが完了してもツールはロック解除のままです。 |
自由な順序 | いいえ:シーケンス内のバッチは、インデックス番号順に実行されます。ソケットが指定されている場合、バッチを実施する際に、次のソケットに対してシステムからプロンプトが表示されます。 はい:シーケンス内の締め付けとバッチは、任意の順序で実行できます。オペレーターは、ID 番号として機能するソケットセレクタビットを使用してどのバッチを実行するかをシステムに示す必要があります。 |
NG で増加 | いいえ: 締め付けが失敗 (NG) するとバッチカウンタは増加しません。 はい: 締め付けが失敗 (NG) するとバッチカウンタが増加します。 |
最大連続 NG | 最大連続 NG は、バッチ内での連続失敗締め付けの最大許容回数として定義されます。値に達すると、イベントのNG締め付けが多すぎます(4020)が表示されます。 |
緩め時の減少 | 決して: 緩めが実行されるとき、バッチ・カウンターは減少しません。これは初期設定(デフォルト)値です。 常に: 緩めが実行されるとき、バッチ・カウンターは減少します。 前回の締め付けが OK だった場合: 前回の締め付けがOKであった場合、緩めが実行されるとき、バッチ・カウンターは減少します。 |
シーケンス中止時間 | オン: 選択したバッチシーケンスは、指定した制限時間内に中止されますオンを選択した場合、Abort time (異常終了時間) のフィールドが開きます。 オフ: 選択したバッチシーケンスを中止することは、できません。 |
Abort time (異常終了時間) | 選択したバッチシーケンスを中止することができる秒数。許可されている範囲は 1 秒 ~ 1600 秒です。 |
バッチシーケンスは、次の場合に完了 (そしてツールがロック) します。
すべての締め付けが OK または NG の結果で完了しました。
シーケンスの中止信号でタスクが終了しました。実行されていない締め付けは NG 結果で報告されます。
シーケンス構成メニューでは、異なるバッチが 1 つのバッチシーケンスに組み合わされます。バッチは何度も繰り返される 1 つの締め付けプログラムで構成されています。
シーケンス構成メニューの各行は単一のバッチを表します。
列 | 説明 |
|---|---|
チェックボックス。 | |
バッチ | バッチのインデックス番号 (シーケンス内の順番)。 |
締め付けプログラム | ドロップダウン・メニュー。このバッチの締め付けプログラムを選択します。 |
バッチサイズ | バッチに含められる締め付け数。 |
ID 番号 | 外部で生成された ID 番号、または ID 番号に変換されるソケットセレクタ位置。
|
バッチシーケンスへの新規バッチの追加
プラント構造
で、リストからコントローラを選択します。メニューバーで、[バッチシーケンス]
タブを選択します。ワークスペースには、バッチシーケンスのリストが表示されます。シーケンス構成メニューで追加コマンドボタンを選択します。バッチシーケンスの作成方法ウィンドウが開きます。
名前を付けてバッチシーケンスを発行し、[追加]を選択します。
プロパティで関連するパラメーターを選択します。
シーケンス構成でバッチの締め付けプログラムを選択します。
バッチサイズ(バッチに含まれる締め付けの数)を入力します。
オプションの ID 番号を入力します。
新しいバッチシーケンスは、シーケンスリストの最初の空き位置に発行されます。空きスロットがない場合、リストの一番下に配置され、使用可能な最小のインデックス番号が割り当てられます。インデックス番号を変更して、バッチ締め付け順序を変更することはできません。
バッチシーケンスのコピーと貼り付け
既存のバッチシーケンスは、同じコントローラにコピーして貼り付けるか、1つのコントローラからコピーしてから別のコントローラに貼り付けることができます。
コピーと貼り付けは、同じコントローラ、または同じタイプの異なるコントローラで実行され、同じソフトウェアバージョンを実行している場合にのみ実行できます。
既存のバッチシーケンスをコピーすると、そのバッチシーケンスに関連付けられているプログラムもすべてコピーされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
メニューバーで、[バッチシーケンス]
タブを選択します。ワークスペースには、使用可能なバッチシーケンスのリストが表示されます。次のいずれかの方法でバッチシーケンスをコピーします。
コピーするバッチシーケンスを右クリックして、メニューから[コピー]を選択します。
または、各行の前にあるチェックボックスをオンにして右クリックし、メニューから[コピー]を選択して、複数のバッチシーケンスを選択します。
プラント構造
で、バッチシーケンスを貼り付けるコントローラを選択します。メニューバーで、[バッチシーケンス]タブを選択します。次にワークスペースエリアの任意の場所を右クリックして[貼り付け]を選択します貼り付けたバッチシーケンスが、リストの最初に使用可能な位置に追加されます。
使用可能なスロットがない場合、バッチシーケンスがリストの一番下に追加され、使用可能な最小のインデックス番号が割り当てられます。インデックス番号を変更して順序を変更することはできません。
バッチシーケンスのエクスポート
バッチシーケンスは、1つのコントローラからエクスポートし、別のコントローラにインポートすることができます。
エクスポートとインポートは、同じコントローラで実行される場合、または同じソフトウェアバージョンとコントローラタイプを実行している異なるコントローラ間で実行される場合にのみ可能です。
既存のバッチシーケンスをエクスポートすると、バッチシーケンスに関連付けられているプログラムとモードもエクスポートされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
プラント構造
で、リストからコントローラを選択します。メニューバーで、[バッチシーケンス]タブ
を選択します。ワークスペースには、現在のすべてのバッチシーケンスのリストが表示されます。エクスポートするバッチシーケンスのチェックボックスを選択します。
管理 を選択し、ドロップダウンメニューからエクスポート を選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
デフォルトのファイル名は<BatchSequenceName>.jsonです。エクスポートされたファイルには、*.json 拡張子を持つ任意の名前を付けることができます。
[保存] を選択します。
バッチシーケンスのインポート
バッチシーケンスは、1つのコントローラからエクスポートし、別のコントローラにインポートすることができます。
エクスポートとインポートは、同じコントローラで実行される場合、または同じソフトウェアバージョンとコントローラタイプを実行している異なるコントローラ間で実行される場合にのみ可能です。
既存のバッチシーケンスをインポートすると、バッチシーケンスに関連付けられているプログラムとモードもインポートされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
プラント構造
で、リストからコントローラを選択します。メニューバーで、[バッチシーケンス]
タブを選択します。ワークスペースエリアは、現在のすべてのバッチシーケンスが記載されているリストを表示します。 追加コマンドボタンを選択して、インポートを選択します。
[ファイルを開く]を選択し、関連する .json ファイルを参照して選択します。
追加を選択します。
使用可能なスロットがない場合、バッチシーケンスがリストの一番下に追加され、使用可能な最小のインデックス番号が割り当てられます。インデックス番号を変更して順序を変更することはできません。
バッチシーケンスのバッチの削除
バッチシーケンス
で、削除するバッチのチェックボックスを選択します。チェックボックスをオンにすると、管理コマンドボタン機能が有効になります。管理 コマンドボタンを選択し、次にドロップダウンリストから 削除 を選択します。選択したバッチがリストから削除されます。
バッチがバッチシーケンスから削除されると、インデックスシーケンスは圧縮されて更新され、ギャップは残りません。削除されたバッチシーケンスのインデックス番号は、作成される次のシーケンスに自動的に割り当てられます。
[ソース]タブの使用
タスクの選択は、仮想ステーション構成ワークスペースのタスクメニューで行われます。
締め付けのためのタスクとして使用される外部信号は、ソース タブで構成します。ソースは、仮想ステーションに接続されたアクセサリーまたは同様の物です。2 つのタイプのソースタスクがあります。
タブで構成します。ソースは、仮想ステーションに接続されたアクセサリーまたは同様の物です。2 つのタイプのソースタスクがあります。
ソース締め付けタスク
ソースバッチタスク
ソース締め付けは、単一の同期モードを選択するのに使用します。
ソースバッチは、一連の同期モードであるバッチシーケンスを選択するのに使用します。
ソース締め付けの概要
締め付けメニューには、ソースバッチとソース締め付け構成のリストが表示されます。別のリストを仮想ステーションにリンクするには、目的の[仮想ステーション]に移動して、[タスクプロパティ] で [選択] を選択します。ここで、ソースを作業として選択することができます。ソース締め付けでは、特定の締め付けプログラムを指定子番号にリンクします。識別子番号がコントローラに送信されると、リンクされたプログラムは別の信号が送信されるまで何度も実行されます。
パラメーター名 | 説明 |
|---|---|
名前 | ソース締め付けに発行された名前。 |
説明 | ソース締め付けの説明。 |
バッチシーケンス完了時にツールをロック | オン: バッチシーケンスが完了するとツールがロックされます。 オフ: バッチシーケンスが完了してもツールはロック解除のままです。 |
NG で増加 | オン: NG 締め付けが行われていても、バッチが前進します。 オフ:締め付けが成功した場合にのみ、バッチが前進します。 |
プログラムごとの最大連続NG |
|
最大連続 NG | 許可される連続NG 結果数を設定します。値を 0 に設定すると、NG 締め付けはチェックされません。最大連続NG に達すると、コントローラはツールをロックし、ソース締め付けは停止します。 |
バッチコントロール | ソース締め付けの実行方法を選択します。
|
コマンド | 説明 |
|---|---|
追加 | 使用可能で一番小さい識別子で新しい行を追加します。 |
削除 | 選択した同期モードをリストから削除します。対応するチェックボックスを選択して、同期モードを選択します。 |
ソース締め付けの作成
プラント構造ワークスペース
でコントローラを選択します。[ソース]タブに移動します。
追加を選択すると新規ソース構成の作成ダイアログウィンドウが開きます。ドロップダウンメニューから [締付け] を選択し、追加を選択します。
ソース締め付けに名前を付けます。
許可される連続NG 結果最大数を設定します。値を 0 に設定すると、NG 締め付けはチェックされません。最大連続NG に達すると、コントローラはツールをロックし、ソース締め付けは停止します。
ドロップダウンメニューから、使用するバッチコントロールを選択します。
内部バッチコントロール:ソース締め付けの繰り返し回数を構成します。
外部バッチコントロール:オープンプロトコルまたはフィールドバスを使用して行われる、ソース締め付けの実行回数を構成します。構成を変更すると、ソース締め付けをクリアし、クリーンな既知の状態から開始されます(バッチ内のバッチカウントは 0 にリセットされます)。変更が有効になる前に、進行中の締め付けを終了させることができます。
既定では、新しいソース締め付けを作成する際に、編集可能な識別子番号は一つしか利用できません。さらに追加するには 追加を選択します。
すべての項目に識別子番号を付けます
モードを選択して、リストから選択することで、各識別子番号にリンクするモードを選択します。
ソースバッチの作成
プラント構造ワークスペース
でコントローラを選択します。[ソース]タブに移動します。
追加を選択すると新規ソース構成の作成ダイアログウィンドウが開きます。ドロップダウンメニューから [バッチ] を選択し、追加を選択します。
ソースバッチに名前を付けます
新規識別子文字列のスキャンで前のスキャンを中止しなければならない場合は、新規識別子を中止をはいに設定します。
識別子の方法(テキストの文字列、または数値文字列の数)を選択します
文字列が任意の順序でスキャンできる場合には、自由な順序をオンに設定します。
識別子文字列は、最大 4 つの異なる文字列で構成することができます。自由な順序をいいえに設定すると、文字列がシステムに認識されるには、文字列が特定の順序でスキャンされる必要があります。
自由な順序をオンに設定して、文字列間で長さが重複するとエラーが発生する場合があります。この場合、締め付けプログラムにスキャンされる順序はアクティブになりません。このエラーを解決するには、自由な順序をオフに設定するか、文字列の長さを調整します。
文字列に名前を付け、文字列の長さを入力します。(文字列の連結の詳細については、『ユーザガイド』の「関連情報」を参照してください)。
有効位置 - 文字列の関連位置。(有効位置の詳細については、『ユーザガイド』の「関連情報」を参照してください)。
保存位置 - システムで記録される位置。(保存位置の詳細については、『ユーザガイド』の「関連情報」を参照してください)。
どの文字列(文字列の内容列)がどのバッチシーケンス(アクティブ化列)にリンクされなければならないかを示します。追加を選択して、さらに文字列を追加します。
「文字列の内容」の入力には、ワイルドカードが使用できます。ワイルドカードは文字列の任意の位置で使用できます。あいまいな一致結果には、バッチシーケンスはアクティブになりません。
ワイルドカードは「.」(ピリオド)です。
新規識別子を中止では、バッチシーケンスが有効で進行中に、2 番目の信号が解釈される方法を制御します。
バッチシーケンス で ID 番号が使用されている場合、入力信号またはソケットセレクタを使用して、バッチシーケンスでバッチを選択できます。
コントローラーは、識別子番号または識別子文字列のいずれかに基づいて、入力信号でバッチシーケンスを選択するように構成できます。
有効位置
有効位置を用いて、事前に定義した文字列と一致するよう文字列を組み合わせた際にバーコードの文字列でどの文字を読み込むかを指定します。有効位置の数は、事前に定義した文字列の文字数と一致する必要があります。
バーコード文字列を読み込む有効位置の構成
バーコード文字列の位置は、1~1024 の間の数に関連します。文字列の最初の位置は 1 であり、最後は 1024 です。
説明 | 有効位置 | 有効な構成 | 事前に定義した文字列と一致するバーコードの文字列 |
|---|---|---|---|
重要な位置の順序 | 1,2,3,7,8 | Ok | ABCGH |
重要な位置の任意の順序 | 7,1,2,3,8 | Ok | GABCH |
番号の範囲 | 1–3,7-8 | Ok | ABCGH |
識別子文字列の組み合わせ
マッチングで使用する識別子文字列は、工場管理システムから最大 4 文字列、または 1 つの文字列に組み合わせる必要がある最大 4 スキャナ入力の組み合わせです。
追加および削除コマンドボタンは、組み合わせる文字列の数を管理します。次のパラメーターが使用できます。
パラメータ | 説明 |
|---|---|
チェックボックス | 削除される場合にエントリを選択します。 |
名前 | 文字列には名前が与えられなければなりません。 |
長さ | 文字列の長さはわかっていなければならず、入力する必要があります。これは、正しい文字列識別子を組み合わせることができる上で重要です。 |
有効位置 | 照合で使用される合成文字列の(ハイフンで区切られた)カンマ区切り位置または範囲。 |
保存位置 | 結果に保存される文字列のカンマで区切られた位置または範囲。 |
複数の識別子文字列を使用する場合、次の段階を実施します。
新しいエントリをテーブルに作成するには、追加コマンドボタンを押します。
文字列に名前を発行します。
文字列の長さを入力します。
追加する文字列全てに段階 1 ~ 3 を繰り返します。最大 4 つの文字列を組み合わせることができます。
各行のスタートエンドパラメーターは、マッチングプロセスの次の段階で使用する組み合わせ文字列識別子のここの文字列位置を定義します。
入力として識別子文字列を使用するタスク選択プロセスの最初の部分は、アクティブにする文字列内の位置を定義します。
識別子文字列のどの位置をマッチングで使用するかを定義するには、有意な位置を入力します。これらの位置は、カンマで区切られているか、範囲で指定されるかのいずれかである必要があります。
保存位置
保存位置は、ソースバッチで使用される各文字列のどの部分が保存され、ログでどのように表示されるかをユーザーが指示できるフィールドです。このフィールドで、保存する必要のある文字列の位置を示します。位置は、完全な文字列の部分のみで構成できます。フィールドが空のままの場合、全(連結)文字列が保存されます。以下の表は、保存された位置の組み合わせのいくつかの例を示します。
保存位置の値はカンマ区切り(スペースなし)であり、範囲はハイフンを使用して示されます。
識別子文字列 | 位置 |
|---|---|
文字列 1:1234567 | 1-7 |
文字列 2:abcdef | 8-13 |
文字列 3:GHIJKL | 14-19 |
文字列 4:890 | 20-22 |
保存位置 | 保存された結果 |
|---|---|
(空き) | 1234567abcdefGHIJKL890 |
1-3,9,11,15,20-22 | 123bdH890 |
8-12,1-7,19,20-21 は 1-12,19-21 に自動的に変更1-12,19-21 | 1234567abcdeL89 |
ソースバッチまたはソースの締め付けのコピーと貼り付け
既存のソースバッチまたはソースの締め付けは、同じコントローラにコピーして貼り付けるか、1つのコントローラからコピーして別のコントローラに貼り付けることができます。
コピーと貼り付けは、同じコントローラ、または同じタイプの異なるコントローラで実行され、同じソフトウェアバージョンを実行している場合にのみ実行できます。
既存のソースバッチまたはソースの締め付けをコピーすると、締め付けまたはバッチシーケンスに関連するすべてのプログラムとモードもコピーされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
メニューバーで、[ソース]
タブを選択します。ワークスペースには、使用可能なソースバッチとソースの締め付けのリストが表示されます。次のいずれかの方法で、ソースバッチまたはソースの締め付けをコピーします。
コピーするソースバッチまたはソースの締め付けを右クリックして、メニューから[コピー]を選択します。
または、各行の前にあるチェックボックスをオンにして右クリックし、メニューから[コピー]を選択して、複数のソースバッチまたはソースの締め付けを選択します。
プラント構造
で、ソースを貼り付ける先のコントローラを選択します。メニューバーで、[ソース]タブを選択します。次にワークスペースエリアの任意の場所を右クリックして[貼り付け]を選択します。
新しいソースバッチまたはソースの締め付けは、シーケンスリストの最初の空き位置に発行されます。空きスロットがない場合、リストの一番下に配置され、使用可能な最小のインデックス番号が割り当てられます。インデックス番号を変更することはできません。
ソースバッチまたはソースの締め付けのエクスポート
ソースバッチまたはソースの締め付けは、1つのコントローラからエクスポートし、別のコントローラにインポートすることができます。
エクスポートとインポートは、同じコントローラ、または同じタイプの異なるコントローラで実行され、同じソフトウェアバージョンを実行している場合にのみ実行できます。
既存のソースバッチまたはソースの締め付けをエクスポートすると、締め付けまたはバッチシーケンスに関連するすべてのプログラムとモードもエクスポートされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
プラント構造
で、リストからコントローラを選択します。メニューバーで、[ソース] タブ
を選択します。ワークスペースには、現在のすべてのソースバッチとソースの締め付けのリストが表示されます。エクスポートするソースバッチまたは締め付けのチェックボックスをオンにします。
管理 を選択し、ドロップダウンメニューからエクスポート を選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
デフォルトのファイル名は<SourceBatch>.json または <SourceTightening>.jsonです。エクスポートされたファイルには、*.json 拡張子を持つ任意の名前を付けることができます。
[保存] を選択します。
ソースバッチまたはソースの締め付けのインポート
ソースバッチまたはソースの締め付けは、1つのコントローラからエクスポートし、別のコントローラにインポートすることができます。
エクスポートとインポートは、同じコントローラ、または同じタイプの異なるコントローラで実行され、同じソフトウェアバージョンを実行している場合にのみ実行できます。
既存のソースバッチまたはソースの締め付けをインポートすると、締め付けまたはバッチシーケンスに関連するすべてのプログラムとモードもインポートされます。これらの構成は単なるコピーであり、要件に応じて変更できます。
プラント構造
で、リストからコントローラを選択します。メニューバーで、[ソース] タブ
を選択します。ワークスペースエリアには、現在のすべてのソースバッチとソースの締め付けのリストが表示されます。追加コマンドボタンを選択して、インポートを選択します。
[ファイルを開く]を選択し、関連する .json ファイルを参照して選択します。
追加を選択します。
新しいソースバッチまたはソースの締め付けは、シーケンスリストの最初の空き位置に発行されます。空きスロットがない場合、リストの一番下に配置され、使用可能な最小のインデックス番号が割り当てられます。インデックス番号を変更することはできません。
[構成]タブの操作
スキャナ、スタックライト、ツールは、I/O バスを介してコントローラに接続されるデバイスタイプの一例です。複数のデバイスを I/O バスに接続し、各デバイスタイプに独自の構成パラメータを持たせることができます。操作の前に、構成を仮想ステーションに割り当てることが必要です。
既存の構成の表示
プラント構造
でコントローラを選択します。 メニューバーにある構成タブ
 を選択します。
を選択します。ワークスペースエリアが、現在のすべての構成のリストを表示します。
ワークスペースリストの行をダブルクリックして、選択した構成の詳細を表示します。
ワークスペースエリアに、選択したデバイスを構成できる構成メニューが表示されます。
構成概要リスト 列
説明
チェックボックス
選択して、管理コマンドボタンリストにアクセスします。
名前
コントローラテンプレートの名前を示します。
タイプ
構成セットアップのタイプ。
ライブラリのリンク
構成のライブラリリンクがある場合は、はい と表示されます。
最終変更
ToolsTalk 2時間で表される最終変更。
変更者
<User> による最終変更
コントローラ更新
コントローラ時間で表される最終変更。
コントローラ更新者
<User> によるコントローラの最終更新
各列の見出しをクリックして、リストを並べ替えることができます。
構成の追加
構成
で、追加を選択します。新しい構成を作成ダイアログウィンドウが開きます。ドロップダウンリストからデバイスのタイプを選択し、[追加]を選択します
プロパティメニューで、構成の名前と説明を入力します。
選択したデバイスの種類に応じて、各構成には独自の入力信号と出力信号のセットがあります。デバイスの各タイプの構成方法は、別途説明しています。
構成のインポート
構成
で、追加を選択します。新しい構成を作成ダイアログウィンドウが開きます。インポートタブを選択します。
ファイルを開くを選択します。
インポートファイルを読み取るための参照ウィンドウが開きます。
必要なインポートファイルを選択します。ファイルは <controller_name>.json の形式である必要があります。開くを選択します。
ダイアログウィンドウで追加を選択します。
構成の削除
構成
で、削除する構成のチェックボックスを選択します。チェックボックスをオンにすると、管理コマンドボタン機能が有効になります。管理 を選択し、次にドロップダウンメニューから 削除 を選択します。
選択された構成がリストから削除されます。
構成は、仮想ステーションに割り当てられていない場合にのみ削除できます。
構成タイプ
内部入出力
コントローラーには 2 つのねじ込み端子が内側にあります。それらはデジタル入出力信号を接続する際に使用されます。
参照セクションに示されているすべてのデジタル入力信号とデジタル出力信号は、内部 I/O 端子に配線できます。
電気仕様および接続についてはコントローラマニュアルを参照してください。
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション セクションを参照してください。
入出力拡張器
I/O 拡張器は I/O バスに接続され、デジタル入出力信号を接続するための拡張機能を提供します。複数の拡張期を接続できます。接続のアドレス構成および仕様については I/O 拡張器のマニュアルをお読みください。
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション セクションを参照してください。
オペレータパネル
オペレーターパネルは I/O バスに接続され、オペレーターとコントローラの間に環境設定可能なデジタル通信リンクを提供します。ランプ、ボタン、ブザーおよびスイッチが通信に使用されます。接続のアドレス構成および仕様についてはオペレーターパネルのマニュアルをお読みください。
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション セクションに記載されています。
スタックライト
スタックライトはコントローラからオペレーターへの長距離視覚通信を提供します。ライトに加えて、アクセサリにはボタン、キースイッチ、ブザー、I/O接続を装備することができます。
スタックライトは I/O バスを使用してコントローラに接続されます。複数のアクセサリーが I/O バスに接続可能です。接続のアドレス構成および仕様についてはスタックライトのマニュアルをお読みください。
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション アイコン を参照してください。
Indicatorbox
インジケータボックスは、コントローラからのステータス信号を表示するために使用される柔軟性に富む表示インジケータです。ディスプレイには20個のデュアルカラーLEDが装備されています。これらは各面に5個のLEDのある正方形にマウントされています。
インジケータボックスの構成
構成
メニューの インジケータ ボックスを選択します。 LEDを追加するには、追加 ボタンをクリックします。
図に従って、位置ボックスで LED 文字を選択します。
赤と緑のLEDの信号を選択します。
LEDを削除するには、LEDを選択して削除ボタンをクリックします。
ツール構成
ツール構成を使用すると、ツールに関連するさまざまな機能をアクティブ化して構成することができます。各ツール構成は、ハードウェアレイアウト構成のツールにマッピングできます。
ツール構成メニューを表示または編集するには:
プラント構造ワークスペース
でコントローラを選択します。 メニューバーで構成
をクリックします。ワークスペースエリアに現在のアクセサリー構成が表示されます。
新しい構成を追加するか、タイプがツール構成の既存の構成をダブルクリックします。
必要な構成を作成します。パラメータについては、各セクションに説明されています。
ツール構成は次のメニューに分かれています:
メニュー | 説明 |
|---|---|
プロパティ | 構成の名前と説明と、ツールタイプフィルタ。 |
一般 | ツールの一般パラメータ。 |
デュアルトランスデューサー | デュアルトランスデューサ機能。 |
プロパティ
ツール構成には固有の名前を指定してください。オプションの説明フィールドも使用できます。
アクセサリー構成リストは、すべての構成をアルファベット順に表示します。
ツール構成メニューを表示または編集するには:
プラント構造ワークスペース
でコントローラを選択します。メニューバーにある構成アイコン
を選択します。ワークスペースエリアに、現在のすべてのアクセサリー構成のリストが表示されます。
選択したツール構成の名前をダブルクリックします。
ワークスペースエリアは現在の構成の詳細を表示し、各トピックに 1 つのメニューに分割されています。
構成名と説明をプロパティメニューに入力します。
ツールタイプでフィルタドロップダウンメニューからツールタイプを選択します。
ツールの数が増えると、メニューの数も増えます。ワークスペースを見やすくするため、メニューを絞り込んで、選択されたツールタイプに関係するメニューのみを表示できます。フィルタはプロパティメニューで設定します。ツールなしを選択すると、すべての使用可能なツール構成パラメータが表示されます。
一般
ソース開始を使ってツール開始方法を設定します。
ソースを開始 | 説明 |
|---|---|
トリガのみ | 締め付けを開始するには、ツールのトリガを押します。 |
トリガまたはプッシュ | ツールトリガを押すかツールをジョイントに押して付けて、締め付けを開始します。 |
トリガとプッシュ | ツールトリガを押してツールをジョイントに押して付けて、締め付けを開始します。 |
プッシュのみ | ツールをジョイントに押して付けて、締め付けを開始します。 |
デジタル入力 | 外部デジタル入力信号を使用して、締め付け開始をトリガします。 |
デュアルトランスデューサ
デュアルトランスデューサー | 説明 |
|---|---|
一次トルクトランスデューサ | 締付けに使用するトルクトランスデューサ。 |
一次角度トランスデューサ | 締め付けに使用される角度トランスデューサ。 |
必要なデュアルトルク | 接続されたツールが締め付けを実行できるようにするには、デュアルトルクトランスデューサ (無効になっていない) が必要です。 |
必要なデュアル角度 | 接続されたツールが締め付けを実行できるようにするにはデュアルアングルトランスデューサ (無効になっていない) が必要です。 |
トレースの二次トルク | 二次トルクトランスデューサからの値がトレースに含まれている場合。 |
トレースの二次角度 | 二次角度トランスデューサからの値がトレースに含まれている場合。 |
ダブルトルク制限の有効化 | ダブルトルクトランスデューサの制限が有効になっている場合。 |
最大トルク差 | 二重トルク差制限の限界 |
ダブル角度制限の有効化 | ダブル角度トランスデューサの制限が有効になっている場合。 |
最大角度差 | ダブル角度差制限の限界。 |
スキャナ
スキャナはアクセサリです。USBケーブルを介してコントローラに直接取り付けられています。
スキャナ構成では、OnかOffとしてパスを構成することが可能です。デフォルト(初期設定)として、構成はOffです。パスが有効化されている(オンに設定されている)場合、スキャンされたバーコード情報は、解読の為に、SoftPLCまたはフィールドバスのどちらかに送られます。
プラント構造ワークスペース
でコントローラを選択してください。ワークスペースのタブ・メニュー・バーで、 構成アイコンを選択してください
。ワークスペースエリアに構成のリストが表示されます。
タイプ列にスキャナのある構成の行をダブルクリックします。
または、追加を選択して、新しいスキャナ構成を作成します。
パラメータ | 説明 |
|---|---|
名前 | オプションの構成名 |
説明 | オプションの構成説明 |
パススルー= On | 解読の為、SoftPLCまたはフィールドバスのどちらかに、スキャンされたバーコードが送られます。 |
パススルー = Off | スキャンされたバーコードはコントローラで解読されます。 |
スキャナ構成
スキャナーは、ツールにインストールされ、ツールアクセサリバスに接続されるツールアクセサリです。スキャナーを作動させる機能ボタンが1つあります。
スキャナ構成では、OnかOffとしてパスを構成することが可能です。デフォルト(初期設定)として、構成はOffです。パスが有効化されている場合、スキャンされたバーコード情報は、解読の為に、SoftPLCまたはフィールドバスのどちらかに送られます。
スキャナの構成
プラント構造ワークスペース
でコントローラを選択してください。ワークスペースのタブ・メニュー・バーで、 構成アイコンを選択してください
。ワークスペースエリアに構成のリストが表示されます。
追加をクリックして新しい構成を作成します。
[構成のタイプ] ドロップダウンから [スキャナ] を選択します。
[追加]をクリックします
選択した構成を設定します。構成はToolsTalk 2に自動的に保存されます。
パラメータ | 説明 |
|---|---|
パススルー= On | 解読の為、SoftPLCまたはフィールドバスのどちらかに、スキャンされたバーコードが送られます。 |
パススルー = Off | スキャンされたバーコードはコントローラで解読されます。 |
仮想ステーションへのアクセサリー構成の割り当て方法については、仮想ステーション セクションを参照してください。
一般仮想ステーション
プラント構造ワークスペース
でコントローラを選択してください。ワークスペースのタブ・メニュー・バーで、 構成アイコンを選択してください
。ワークスペースエリアに構成のリストが表示されます。
タイプ列に一般仮想ステーションを持った構成行をダブルクリックしてください。
または、 追加 を選択して、新しい一般仮想ステーション構成を作成します。
パラメータ | 説明 |
|---|---|
名前 | オプションの構成名 |
説明 | オプションの構成説明 |
締め付けなしの結果は、フィルタされずに (デフォルト) 報告されるか、選択さた結果が報告されるように構成することができます。16 までの一般仮想ステーション構成が作成できます。
関係する締め付けなしの結果:
緩め
バッチ増加
バッチ減少
バッチをリセット
締め付けプログラムのバイパス
バッチシーケンスの中止
バッチシーケンスのリセット
StepSync または Flex コントローラを使用する場合は、一般仮想ステーション構成で次のパラメータも表示されます。
固定ステーション
自動有効化では、次のいずれかの設定を使用できます。既定の設定は [なし] です。
設定 | 説明 |
|---|---|
一度も見ない | 締め付けを実行するには、入力操作有効を高く設定する必要があります。 |
常時 | 入力した [操作有効] の状態にかかわらず、常に締め付けを実行できます。 |
締め付けなしの結果フィルタの作成
デフォルトは「オン」で、すべての結果が報告されます。結果をフィルタリングするにはスイッチを「オフ」に設定すると、「オン」に設定されているフィルタのみが報告されます。
締め付けなしの結果は、報告がフィルタリングされているかどうかに関係なく、常にコントローラと Web ユーザーインターフェースに表示されます。
一般仮想ステーション構成を適用するには、それを仮想ステーション セクションで仮想ステーションに割り当てます。
割り当てられていない一般仮想ステーション構成のみが削除できます。
締め付け設定の有効化と無効化
一般仮想ステーション構成には、締め付け無効化と緩め無効化のパラメータの設定に使用される締め付けセクションがあります。
プラント構造
でコントローラを選択します。 メニューバーにある構成タブ
に移動します。ワークスペース領域には、使用可能な構成が表示されます。
既存の一般仮想ステーションをダブルクリックして構成するか、追加を選択して構成する新しい仮想ステーションを作成します。
次の表の情報に従って、[締付け設定] パラメータで適切な選択を行います。
パラメータ値 | 説明 |
|---|---|
オフ | 無効化されたツールは、緩めのステータスに関係なく無効化されたままになります。 |
OK時 | 無効化されたツールは、OK緩めが実行された後にロック解除されます。 |
常時 | 無効化されたツールは、緩めステータスに関係なく、緩めが実行されるとすぐにロック解除されます。 |
緩め無効 | 説明 |
|---|---|
オフ | 緩め無効はオフです。オペレーターは、いつでもネジを緩めことができます。 |
OK 締め付け時 | OK 締め付けのために緩めを無効にします。オペレーターは、締め付け OK で終了したネジを緩めることはできません。 |
NG 締め付け時 | NG 締め付けのために緩めを無効にします。オペレーターは、締め付け NOK で終了したネジを緩めることはできません。 |
常時 | 緩め無効は常時オンです。オペレーターは、決してネジを緩めことができません。 |
締め付け無効化 | 説明 |
|---|---|
オフ | 締め付け無効はオフです。オペレーターは、いつでもネジを締め付けることができます。 |
OK 締め付け時 | OK 締め付け後に締め付けを無効にします。オペレーターは、現在の締め付けが OK で終了すると、別のネジを締め付けることができません。 |
NG 締め付け時 | NG 締め付け後に締め付けを無効にします。オペレーターは、現在の締め付けが NG で終了すると、別のネジを締め付けることができません。 |
すべての締め付け後 | 締め付けの無効化は、締め付け後毎に有効化されます。オペレータは、現在の締め付けが終了するまで別のネジを締めることはできません。 |
ツールロックの動作
ツールロックの動作は、デフォルトではオフに設定されています。この動作は、緩めを実行することで、オペレータがツールのロックを解除できるようにオーバーライドできます。
無効にしたツールを緩めた後にロック解除できるようにする
ツールで使用する構成 (ツールが接続されている仮想ステーションで設定) で、[緩めでツールロック解除] を [OK時] または[常時]に設定します。
上記の設定を有効にするには、次の3つの条件を満たす必要があります:
1.[緩めを無効にする] パラメータが [オフ] または[常時]に設定されていない必要があります。
2.締め無効値を締め付け無効化と同じ値に設定することはできません。
3.使用される締め付けプログラムで、緩めが有効になっている必要があります。
無効状態であるために、ツールの締め付けまたは緩めがロックされた場合、次の入力信号のいずれかによってロック解除することができます。
Master_Unlock
Unlock_Tool_On_Disable
この入力信号は、アクセサリー、プログラム可能なツールアクセサリー、フィールドバスユニットのいずれかからコントローラに送信できます。
ソケットセレクタ
ソケットセレクタ構成の表示・編集または作成
ソケットセレクタは I/O に接続されており、オペレーターが、締め付け手順に正しいソケットを選択する際の手引きになります。
プラント構造
でコントローラを選択します。 構成
に移動します。ワークスペースエリアに、選択したコントローラに作成された構成のリストが表示されます。
選択したソケットセレクタ構成の名前をダブルクリックして、構成を表示または編集します。
構成
で、追加を選択します。新しい構成の作成ポップアップウィンドウが表示されます。ドロップダウンリストから[ソケットセレクタ]を選択し、[追加]を選択します。
メニューのプロパティエリアに、構成の名前と説明を入力します。
ソケットセレクタ構成で、コントロールタイプの[自動]または[外部]を選択します。
有効にする各ソケットの位置に対して、チェックボックス
を選択します。無効にする各ソケットの位置に該当するチェックボックスをクリアします。
4 つのソケットのグループを追加または削除するには、追加または削除を選択します。
最大 32 のソケットセレクタの位置を使用できます。
構成の仮想ステーションへのアドレス指定と割り当ての詳細については、仮想ステーションセクション を参照してください。
ソケットセレクタのコントロールスイッチ
コントロールスイッチには次の 2 つの位置があります。
位置 | 説明 |
|---|---|
自動 | コントローラーは、ソケットセレクターのLEDランプを制御し、オペレーターが正しいソケットを選択できるようにします。 |
外部 | コントローラはソケットセレクタを制御しません。LED ランプのすべての機能は、オープンプロトコル通信またはフィールドバスモジュールを介して外部制御システムによって制御されます。 |
[ツール]タブの使用
ツールワークスペースにはコントローラに接続されているツールのリストが表示されます。表示されるメニューは、固定ツールのコントローラか、携帯型ツールのコントローラで異なり、接続されているツールの詳細を表示します。
設定メニューでは、ツールのアラームが設定できます。これらのアラームのトリガポイントはツールメニューにあります。
ツールメニューを表示するには:
プラント構造ワークスペース
でコントローラを選択します。ツール
 セクションに移動します。
セクションに移動します。コントローラに接続されているツールのリストが表示されます。
列
説明
ツールタイプ
ツールのタイプを示します。
型式
ツールの詳細なモデル番号。
シリアル番号
ツールのシリアル番号。
MAC address (MACアドレス)
MAC アドレスは、ツールに MAC アドレスがある場合にのみ表示されます。
ソフトウェアバージョン
ツールのソフトウェアバージョン。
最大トルク
ツールで可能な最大トルク値。
TurboTight の最大トルク
TurboTight 戦略を使用する際のツールで可能な最大トルク値。
特定のツールのみに適用されます。
TensorPulse の最大トルク
TensorPulse 戦略を使用する際のツールで可能な最大トルク値。
特定のツールのみに適用されます。
最大速度
ツールの最高回転速度。
次の校正
ツールの次の校正日。
仮想ステーション
ツールが接続されている仮想ステーション名。
チャンネル
ツールのチャンネル番号。
表のツールのいずれかをダブルクリックして、詳細情報を表示します。
ツールの接続方法やワイヤレスペアリング方法については、コントローラのマニュアルを参照してください。
一般情報
メニューは、固定ツールまたは携帯型ツールをサポートするコントローラ用です。
情報 | 説明 |
|---|---|
型式 | ツールモデル名 |
シリアル番号 | ツールのシリアル番号。 |
MAC address (MACアドレス) | MAC アドレスは、ツールに MAC アドレスがある場合にのみ表示されます。 |
製品番号 | オーダー番号と同じ。 |
ソフトウェアバージョン | ツールソフトウェアバージョン数。 |
一般的なツール情報は、ツール自体によって、コントローラまたはToolsTalk 2に表示されます。
限界
メニューは、固定ツールまたは携帯型ツールをサポートするコントローラ用です。
情報 | 説明 |
|---|---|
最大トルク | ツールが締め付けで使用できる最大トルク。 |
最大速度 | ツールの最高回転速度。 |
最小トルク | ツールが締め付けに使用できる最小トルク。 |
変速比 | 出力ギヤの角速度に対する入力ギヤの角速度の比率 |
ツール限度情報は、ツール自体によって、コントローラまたは ToolsTalk 2に示されます。
接続
コントローラへの接続と割り当てられている仮想ステーション。
サービス設定
キャリブレーション
このメニューは、ツールが基準トランスデューサにどれだけ対応しているか、および差異を調整する方法を制御するために使用されます。
較正値はツールメモリに保存され、これを使って、正しいトルク値がコントローラで表示されるようツールのトルクトランスデューサで示されるトルク値を調整します。コントローラは最終校正日を表示します。
ツールの校正は、コントローラで行われ、トルク基準トランスデューサーを使用します。このプロセスは、Power Focus 6000 controller マニュアルに記述されています。
計算値を入力して新しい校正値をツールメモリに保存し、[設定]をクリックします。
パラメータ | 説明 |
|---|---|
最終校正 | 最終校正の日付。 |
校正値 | パラメータ入力ボックスに測定値と計算値を入力します。 |
次の校正 | 次回の校正期限。 |
セット | 入力した値を保存します。 |
メンテモード
このツールは、サービス間隔数を保存し、ツールのメンテナンスまたはサービスが次に行われる前に締め付けを何回実行することができるかをカウントします。
パラメータ | 説明 |
|---|---|
最後の点検 | 最後の点検が実施された日時。最後のサービス日付は、修理工場で設定されます。最後のサービス日は、リセットボタンが押された現在の日時に設定されます。 |
サービスでの総締め付け数 | サービスの総締め付け数 は、最初にツールが使用されてから、ツールが行った締め付けの合計数です。この値は、サービス時に更新され、次のサービスまで同じままです。 |
残りの締め付け数 | サービス間隔に達するまでの残りの合計締め付け回数 |
サービス間隔 | 次のサービスの前に実施される締め付け数。10,000 の倍数で設定できます。 |
セット | コマンドは、サービス間隔パラメータ入力フィールドに入力した値を保存し、値を 10,000 の倍数に調整します。 |
サービスカウンタ/データのリセット | リセットコマンドは、カウンタをリセットし、最後のサービス日を現在の日付に設定します。 |
トランスデューサ情報
ツールには、1つのメインおよび1つのセカンダリトルクトランスデューサと、1つのメインおよび1つのセカンダリ角度トランスデューサを含めることができます。各トランスデューサー(トルクまたは角度)についての情報はここに表示されます。
情報 | 説明 |
|---|---|
ON | トランスデューサが有効かどうかを示します。 |
変速比 | トランスデューサとツールの外軸との間のギア比。 |
ワインドアップ | 角度トランスデューサのワインドアップ補償係数。 |
情報 | 説明 |
|---|---|
ON | トランスデューサが有効かどうかを示します。 |
シリアル番号 | 文字列としてのトランスデューサのシリアル番号。 |
品番 | 文字列としてのトランスデューサーの品番。 |
較正値 | トランスデューサの校正値をNmで表します。 |
正常性
環境モニターからのデータを示します。この機器は定期的にパラメータを測定して保存します。
パラメータ | 説明 | 値 |
|---|---|---|
リフレッシュ | コマンドボタン: ツール値を読み取ります。 | |
履歴 | コマンドボタン: | |
ツールモーター温度 | 月/日/年 時:分:秒で表示される最新の温度記録値。 | 摂氏または華氏 |
ツールエレクトロニクス温度 | 月/日/年 時:分:秒で表示される最新の温度記録値。 | 摂氏または華氏 |
ゼロオフセットとシャント限度
ツールには、メイントルクトランスデューサとセカンダリトルクトランスデューサを1つずつ含めることができます。トルクトランスデューサごとに、制限値がここに示されています。
情報 | 説明 |
|---|---|
シャント限度 | 測定されたシャント校正値の最大許容値(%)。 |
シャントドリフト限度 | 測定されたシャント校正値の最大許容変化(%)。 |
ゼロオフセット限度 | 最大許容ゼロオフセット補正 (%)。 |
ゼロオフセットドリフト限度 | ゼロオフセット補正の最大許容変化 (%)。 |
[仮想ステーション] タブの操作
仮想ステーションタブ は、コントローラがプラント構造 で選択されるとコントローラメニューバーに配置されます。
バーチャルステーションは、コントローラーのソフトウェアを抽象化したものです。1 つのコントローラで複数の仮想ステーションの作成が可能です。各仮想ステーションはコントローラとして動作します。仮想ステーションには必要に応じてさまざまな構成を割り当てることができます。
仮想ステーションメニューから、タスクの選択、アクセサリー構成の割り当て、ツールの割り当て、診断を使用する送受信信号の監視と操作、通信プロトコルパラメータの設定ができます。仮想ステーションのアイコンは、FlexControllerとPower Focus 6000 controllerの両方で使用できます。
仮想ステーションの概念はFlexControllerには使用できません。ソフトウェアアーキテクチャ設計は両タイプのコントローラで同じなので、仮想ステーションは FlexControllerインターフェースに表示されます。
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
仮想ステーションの概要
仮想ステーションのワークスペースを開いて、仮想ステーションのリストを表示するには:
プラント構造ワークスペース
でコントローラを選択します。メニューバーで仮想ステーション
タブを選択します。ワークスペースエリアに、コントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。
列 | 説明 |
|---|---|
チェックボックス | 仮想ステーションを選択します。 |
名前 | 仮想ステーションの名前を示します。 |
変更者 | 変更を行ったユーザー |
コントローラ更新 | コントローラが最後に更新された時刻 |
コントローラ更新者 | コントローラを更新したユーザー |
コマンド | 説明 |
|---|---|
追加 | 新しい仮想ステーションを作成します。 |
削除 | 選択した仮想ステーションをリストから削除します。 |
仮想ステーションの構成メニューにアクセスするには:
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
次のメニューが表示されます:
メニュー | 説明 |
|---|---|
プロパティ | 構成に名前と説明を指定します。オプション。 |
プロトコル | 外部通信プロトコルの有効化と構成。 |
ツール | 仮想ステーションにツールを割り当てます。 |
ツール構成 | 仮想ステーションにツール構成を割り当てます。 |
フィールドバスマッピング | コントローラに構成され、割り当てられている場合に、フィールドバスマッピングを表示します。このフィールドは情報を示すだけです。実際のフィールドバスのマッピングと設定は、フィールドバスとSoftPlc
|
タスク | 仮想ステーションにタスクを割り当てたり、ソース信号が実行するタスクを選択する方法を構成します。 |
アクセサリ | アクセサリー構成とアドレスをアクセサリーに割り当て、その組み合わせを仮想ステーションに割り当てます。 |
一般 | 一般仮想ステーションを割り当てるときに使用します。 |
手動モード | 手動モード機能の構成に使用します。 |
ライセンス | 仮想ステーションへのライセンスと機能の割り当て・削除に使用されます。 |
FlexControllerでは、プロパティ、フィールドバスマッピング、タスクメニューのみが使用できます。
仮想ステーション - プロパティ
仮想ステーションには名前が必要です。これはプロパティメニューで指定します。既定の名は仮想ステーション < index nr >です。オプションの説明フィールドも使用できます。
名前フィールドを空白にすると、赤のエラーインジケーターが表示されます  。
。
仮想ステーションへのタスク割り当て
仮想ステーションウィンドウのタスクメニューは、タスクの選択を制御します。
タスクメニューは、タスクの仮想ステーションへの割り当てに使用します。
機能 | 説明 |
|---|---|
名前 | 仮想ステーションへ現在割り当てられているタスク。 |
割り当て解除 | コマンドボタン。 仮想ステーションからタスクを選択解除します。 |
選択 | コマンドボタン。 タスクを手動で変更するか、外部ソースを構成してタスクを選択します。タスクの選択を構成するタスクの選択ポップアップウィンドウが開きます。 |
交換 | コマンドボタン。 タスクがすでに選択されている場合、[選択]コマンドボタンは[変更]に置き換えられます。[変更]を選択して、新しいタスクを選択します。 |
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
タスクメニューで選択をクリックします。
タスクの選択ポップアップウィンドウが表示されます。
[同期モード]、[ソース]または[バッチシーケンス]タブで目的のタスクを選択します。
選択をクリックします。タスクの選択ポップアップウィンドウが閉じます。
閉じるボタンをクリックすると、何も変更せずにポップアップウィンドウを閉じます。
プッシュ機能でコントローラを更新します。
タスクメニューの名前フィールドが更新されます。
ソース番号と ID 番号を使用するタスク選択と、タスク選択のための識別子文字列の詳細については、ソース構成のマニュアルを参照してください。
仮想ステーション - プロトコル
プロトコルメニューには、単一または複数の通信プロトコルとパラメータ設定が実装できます。使用できるプロトコルは、IAM ライセンスによって異なります。
顧客特定の通信プロトコルも、プロトコルメニューで構成されます。
オープンプロトコル
オープンプロトコルの構成
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
プロトコル メニューの構成をクリックします。
仮想ステーションのオープンプロトコル構成スイッチは、工場制御機器の一部である、仮想ステーションと整数との間のオープンプロトコル通信を有効または無効にできるようにします。
オープンプロトコル通信を有効または無効にするには、[オン]または[オフ]を選択します。
オープンプロトコルは、設定に使用されるか、あるいは強化結果をもたらすコントローラの同じイーサネット接続ファクトリを使用します。
各バーチャルステーションは、ポート番号で独自に特定されます。オープンプロトコルを使用する各バーチャルステーションで、ポート番号をポートフィールドに入力する必要があります。
レガシカウンタ設定では、シーケンスのすべての締め付けをカウントし、その数値を二次システムに出力します。この設定を有効にするには、レガシーカウンタを使用をオンに設定します。
SoftPLCインデックスは、共有メモリ内でオープンプロトコルのコマンドが書き込まれる場所をマッピングするために使用されます。既定値は 1 ですが、1 ~ 6 の値を入力できます。
SoftPLCインデックス の既定値は常に 1 で、使用中かどうかを確認するチェックは行われないため、仮想ステーションの追加時に同じインデックスが複数回構成されるようにシステムを構成している可能性があります。この場合、Soft PLC は、着信 MID がどの仮想ステーションから発信されているかを判断できません。
仮想ステーションでのフィールドバスマッピング
コントローラには、フィールドバス通信モジュールをインストールできます。この通信モジュールは、すべての仮想ステーションに機能します。フィールドバスマッピングメニューは、コントローラにマッピングされているフィールドバス構成を示します。フィールドバスが構成され、この構成は フィールドバスとSoftPLC で割り当てられ、マッピングされます。
フィールドバス診断
フィールドバスマッピング診断機能にアクセスするには:
プラント構造ワークスペース
でコントローラを選択します。 仮想ステーション
に移動します。ワークスペースエリアに、コントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。
仮想ステーション名をダブルクリックして既存の構成を開くか、追加を選択して新しい仮想ステーション構成を作成します。
ワークステーションには、マッピングされているフィールドバスなどのメニューが表示されます。
診断ボタンをクリックして、フィールドバス診断機能を入力します。
フィールドバス診断機能は、フィールドバスで送受信される、送受信信号を監視できます。強制モードから情報を操作し、フレームの作成と送信をすることもできます。フィールドバス診断は次から使用できます。
コントローラ GUI
Web GUI
ToolsTalk
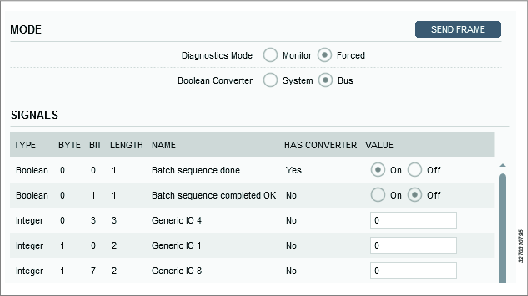
診断モード | 監視モードまたは強制モードを有効にします。 監視モード: 監視モードでは、フィールドバスで送受信される送受信フレームで構成されたすべてのフィールドの状態を見ることができます。受信フレームのビットに変更があれば、ビューが更新されます。 強制モード: 強制モードになると、データが現在の状態に固定され、フレームがロックされます。強制モードでは、信号を手動で有効化および無効化することも、値を入力して 1 つ以上の信号に強制することもできます。これは受信フレームまたは送信フレーム、またはその両方で可能です。 |
ブール値コンバーター | システムビューとバスビューの間のスイッチ。コンバーターは、フィールドバスで送受信される信号を反転できます。 |
タイプ | 信号のタイプ。 |
バイト | フレームの位置。 |
ビット | フレームの位置。 |
長さ | フレームの信号の長さ。 |
名前 | 信号の名前。 |
コンバーターあり | コンバーターが構成されている場合、コンバーターありははいになります。 はいの場合、信号を反転するためにコンバーターを使用できます。いいえの場合、コンバーターは適用されません。 |
値 | 値列は、信号とその値のリストを表示します。送受信フレームの各信号の値は、タイプに応じてブール値、整数、文字列のいずれかの形式で表示されます。値は強制モードで編集できます。単一の信号、同じフレームの複数の信号、またはすべての信号を変更することができます。 値を変更すると、フレームの送信ボタンをクリックして新しいフレームをコントローラにプッシュし、新しい値を適用します。 診断モードを終了すると、すべての値は、送受信信号の最後に保存されたフレームの値に戻ります。 |
同時に有効にできるのは 1 つの診断セッションのみです。診断がすでに使用されている場合は、情報メッセージが画面で表示されます。
仮想ステーションへのアクセサリの割り当て
このメニューは、携帯型ツールをサポートするコントローラ専用です。
コントローラは CAN バスから複数のアクセサリーに接続できます。各アクセサリーには、1 ~ 15 の範囲のバスに固有のアドレスが必要です。仮想ステーションに複数のアクセサリーを割り当てることができます。
アクセサリーに仮想ステーションを割り当てるには、アクセサリーにはアクセサリー構成が割り当てられている必要があります。
バーチャルステーションに現在割り当てられているアクセサリーを表示するには:
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
機能 | 説明 |
|---|---|
チェックボックス | 仮想ステーションから割り当て解除ができるアクセサリー構成を選択します。 |
名前 | アクセサリーに割り当てられている構成の名前。 |
タイプ | アクセサリーのタイプ。 |
CAN ノード | アクセサリーの CAN アドレス。 |
シリアル番号 | アクセサリーのシリアル番号。 |
ステータス | 次のいずれか。
|
CAN ノード列には、新しいアクセサリーの接続時に使用できない使用済みのアドレスが示されます。ソケットセレクタの割り当てには、複数のアドレスを含めることができます。
ソケットセレクタには、CAN ノードの順番が重要です。最初のソケットセレクタの最下位の位置が、最初に割り当てられます。
機能 | 説明 |
|---|---|
割り当て解除 | 選択されたアクセサリーが仮想ステーションから割り当て解除されます。アクセサリーはコントローラに接続されたままになります。 |
選択 | 新規アクセサリーを追加します。アクセサリーのポップアップウィンドウが開きます。 |
診断 | I/O 信号挙動を監視し、コントローラの内部論理とアクセサリー間で指定する状態に信号を強制することが可能です。 |
仮想ステーションへのアクセサリの追加
選択したアクセサリーには固有で有効な CAN バスアドレスが必要です。アクセサリー構成はアクセサリーに割り当てられ、アクセサリーは仮想ステーションに割り当てられます。
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
仮想ステーションにアクセサリーを割り当てるには:
アクセサリーメニューの選択ボタンをクリックし、アクセサリーポップアップウィンドウを開きます。
タブの 1 つでアクセサリーのタイプを選択します。
内部入出力
ソケットセレクタ
I/O 拡張器
オペレータパネル
スタックライト
スキャナー
Indicatorbox
- をクリックして構成のリストから構成を 1 つ選択します。
該当する場合は、
をクリックして使用可能な CAN ノードのリストからアドレスを 1 つオンにします。選択ボタンをクリックして、アクセサリー・オプションを一つ追加します。
仮想ステーションに割り当てる各アクセサリーに手順を繰り返す。
キャンセルボタンをクリックし、ポップアップウィンドウを閉じます。
アクセサリーメニューが更新され、新しく割り当てられた構成が表示されます。
アクセサリーアドレスは、アクセサリーの回転スイッチで設定されます。アクセサリーの詳細製品情報文書を参照してください。アクセサリーアドレスの範囲は、1~15 の範囲です。
仮想ステーションからアクセサリの割り当てを解除する
アクセサリ構成の割り当てを解除し、仮想ステーションへの接続を解除するには、次のステップに従います。
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
アクセサリメニューで、割り当てを解除するアクセサリ構成のチェックボックスをオンにします。
アクセサリーメニューで割り当て解除コマンドボタンを選択します。
変更を反映してコントローラを更新するには、変更のプッシュ配信 コマンドボタン
を選択します。
アクセサリメニューの一覧が更新されます。
一般仮想ステーション構成の割り当て
仮想ステーション構成への移動
プラント構造ワークスペース でコントローラ
を選択します。 仮想ステーション タブ
を選択します。
仮想ステーションの概要に、選択したコントローラの仮想ステーションのリストが表示されます。バーチャルステーションがまだ作成されていない場合は、リストは空です。仮想ステーションをダブルクリックして既存の構成を開くか、追加をクリックして新しい仮想ステーション構成を作成します。
仮想ステーションに一般構成を割り当てるには:
仮想ステーション構成ワークステーションで、一般エリアに移動します。
変更を選択します。ポップアップウィンドウに表示される一般構成は構成
に追加されているものです。一般構成を 1 つ選択して変更ボタンを選択します。
選択した一般構成で一般メニューが更新されます。
割り当てられていない一般仮想ステーション構成のみが削除できます。
コントローラ情報タブの操作
コントローラ情報  タブのメニューでは、単一の選択コントローラについての情報を示します。
タブのメニューでは、単一の選択コントローラについての情報を示します。
コントローラ情報メニューの表示:
プラント構造ワークスペース
でコントローラを選択します。[コントローラ
]タブに移動します。ワークスペースエリアにコントローラメニューが表示されます。
コントローラワークスペースに次のメニューが示されます。
メニュー | 機能 |
|---|---|
コントローラ情報 | コントローラと IAM モジュールの一般情報を示します。 |
ライセンス | コントローラに発行されたさまざまなライセンスタイプに関する情報を提供します。 |
ソフトウェア | コントローラのソフトウェア構成に関する情報を示します。 |
ハードウェア | PF6 コントローラのハードウェア構成に関する情報を示します。 |
エクスポート/インポート | コントローラの結果と構成のエクスポートと、コントローラ構成のインポート。ファイル位置のためのダイアログボックスが表示されます。 |
正常性 | 環境パラメータとシステムの正常性パラメータの監視と記録を行います。 |
表示される情報は情報を示すだけです。パラメータの設定はメニューではできません。
コントローラ情報と IAM メニュー
インテリジェントアプリケーションモジュール(IAM)は、コントローラドアの内側にあります。IAM にはコントローラプログラム、構成パラメータおよび保存結果が含まれています。
IAM モジュールは容易に取り外し、他のコントローラへ移動することができ、その後で前のコントローラと全く同じように機能します。
コントローラ情報メニューと現在の構成を表示するには:
プラント構造
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
メニュー | 機能 |
|---|---|
型式 | コントローラのタイプに関する一般情報を示します。 |
Serial number (シリアル番号) | コントローラのシリアル番号に関する情報を示します。 |
イーサネット用サービスポート | サービスポートの IP アドレスに関する情報を示します。このポートから、サービスエンジニアは工場ネットワークに接続することなく、コントローラにアクセスできます。 |
メニュー | 機能 |
|---|---|
タイプ | アトラスコプコは種々の機能を備えた異なる IAM タイプを提供しています。 |
顧客キー | アプリケーション特定、または顧客特定の構成のための識別子です。 |
Serial number (シリアル番号) | IAM モジュールのシリアル番号に関する情報を示します。 |
ソフトウェアメニュー
プラント構造ワークスペース
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
メニュー | 機能 |
|---|---|
現在のバージョン | 主要な有効で動作中のソフトウェア。 |
保存したバージョン | 保存されている無効なソフトウェア。 |
インストールされているソフトウェアのバージョンを切り替えることも可能ですが、これには次の 2 つの利点があります。
コントローラソフトウェアは通常作業と並行してコントローラにロードすることができる。いくつかのコントローラを更新する際にすべてのコントローラを同時にすばやく切り替えることができます。
ソフトウェアアップグレードが予期しない結果となった場合、以前のバージョンへ切り替えることで迅速にバックアップによる解決ができる。
ハードウェア構成
このメニューには、システムハードウェア構成に関する情報が示されます。
プラント構造ワークスペース
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
ハードウェアメニューには、コントローラを構成するさまざまなハードウェアモジュールが一覧表示されます。
各モジュールについて、次のデータが示されます。
Serial number (シリアル番号)
製品番号
ソフトウェアバージョン
エクスポートとインポート
エクスポートおよびインポートの機能を用いて、外部プログラムでの分析のために、結果メニューでアクセスできるイベントと締め付け結果をエクスポートするとともに、コントローラ間で締め付けプログラム、バッチ、およびコントローラ構成を転送します。
エクスポートコマンドは、次のために使用できます。
さらに処理するために締め付け結果やイベントをエクスポートする。
アトラスコプコのサービスエンジニアによるデバッグ作業のための、ログファイルのエクスポート。
別のコントローラに構成をコピーするために使用できるコントローラ構成全体のエクスポート。
違いを見るための、エクスポートされた 2 つの構成の比較。
プラント構造
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
エクスポートボタンをクリックして、次のいずれかをエクスポートします。
パラメータ
説明
Export (エクスポート)
すべてのコントローラ情報をエクスポートします。
構成のエクスポート
設定と構成をエクスポートします。
ツールログのエクスポート
接続されているツールからログ (締め付けおよびハードウェアの情報) をエクスポートします。SRB、TBP、STB に使用できます。
エクスポートは atlas_tool_i.zip と ExportInfo.txt から構成されます。
エクスポートファイルを保存する場所を選択して、OK をクリックします。
プラント構造
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
コントローラ構成をインポートするには、インポートコマンドボタンをクリックします。
ファイルを開くをクリックします。インポートするファイルを選択します。
インポートするファイルは事前にエクスポートされているファイルである必要があります。
インポート機能を使うと、締め付けプログラム、バッチ、アクセサリ、コントローラの設定はすべてインポートファイルの設定と置き換えられます。ただし、ネットワークの設定、PIN、結果およびイベントはインポートされません。
システム正常性モニター
機器の正常性モニターでは、パラメータを定期的に測定して、保存します。
プラント構造ワークスペース
でコントローラを選択します。コントローラ
に移動します。ワークスペースエリアにコントローラメニューが表示されます。
正常性メニューには環境データとシステム正常性情報が表示されます。
情報 | 値 | 説明 |
|---|---|---|
リフレッシュコマンドボタン | 摂氏または華氏 | コントローラから情報を読み取り、最新の結果を表示します。 |
コントローラー温度 | 摂氏または華氏 | 月/日/年 時:分:秒で表示される最新の温度記録値。 |
バッテリーステータス | OK/NOK | コントローラのコンピュータボードでメモリとリアルタイムクロックバッテリーを監視します。 ステータスメッセージの NOK は、データの喪失や間違った結果を避けるために、早急にバッテリーの充電が必要なことを意味します。 月/日/年 時:分:秒で表示される最新の記録値。 |
履歴コマンドボタン | モニター測定値のリストを示します。 |
[設定] タブの操作
プリファレンス
設定メニューにはプリファレンスセクションが含まれ、コントローラインターフェースの言語、トルク単位、PIN による保護の選択に使用できます。
コントローラプリファレンスを設定するには:
プラント構造
でコントローラを選択します。 設定
 に移動します。
に移動します。ワークスペースエリアに設定メニューが表示されます。
コントローラプリファレンスのパラメータ:
パラメータ | 説明 | 既定 |
|---|---|---|
トルク単位 | コントローラの GUI または Web GUI でこのコントローラに表示されるトルク測定結果の単位を選択します。 | Nm |
温度単位 | コントローラの GUI または Web GUI でこのコントローラに表示される温度測定結果の単位を選択します。 | 摂氏 |
言語 | コントローラの GUI または Web GUI でこのコントローラに表示されるコントローラの言語を選択します。 | 英語 |
工場出荷時ポート経由でのアクセス | オン/オフ。コントローラとの通信の有効化 (オン) または無効化 (オフ)。 | オン |
PIN の使用 | コントローラの GUI または WebHMI(工場ネットワーク)からアクセスすると、このコントローラの PIN を有効にできます。 PINは、GUIまたはWebHMIを介してコントローラにアクセスするユーザーにのみ適用されます。PINが有効化されているため、ユーザーは、ToolsTalk 2からロックアウトされたり、またはToolsTalk 2のコントローラの構成作業(構成および構成のプッシュ)からロックアウトされることはありません。 オン: コントローラにアクセスするユーザーは、コントローラへの書き込みアクセスを取得するためにPINコードを使用する必要があります。 オフ: ユーザーがコントローラへの書き込みアクセスを取得するためのPINコードは必要ありません。 | オフ |
サービスポートにPINを使用 | PINは、サービスポートを介してアクセスする際にコントローラで有効化することができます。 オン: コントローラにアクセスするユーザーは、コントローラへの書き込みアクセスを取得するためにPINコードを使用する必要があります。 オフ: ユーザーがコントローラへの書き込みアクセスを取得するためのPINコードは必要ありません。
| オフ |
PIN コード | 追加する各ユーザーをに、4 桁の PIN コードを選択します。ユーザー PIN の有効化/無効化。 | |
アイドル時間タイムアウト | コントローラ GUI または Web GUI が、アイドル時間タイムアウト後に自動的にロックされます。 | 120 秒 |
PIN 設定
PIN を使うことで、コントローラの不正利用や偶発的な変更を防ぐことができます。コントローラ には最大 10 人のユーザーを追加でき、それぞれには独自の PIN が割り当てられます。PIN はコントローラ構成にリンクされておらず、ログインのために主に使用されることにご注意ください。
PIN が変更された場合、またはコントローラ GUI または WebHMI で何らかの変更が行われた場合、変更を行ったユーザがログに記録されます。これは、 外部の変更通知ウィンドウ内で変更者欄に表示され、変更履歴に追加されます。
PIN が有効になると、次を介して コントローラにアクセスする際にPIN コードが 要となります:
コントローラ GUI から
Web GUI から
PIN のアクティブ化
設定メニューで、PIN の使用をオンにします。
[PINコード(暗証番号)] を選択します。
新規ユーザーのPINコードを追加する
[PINコード]ダイアログウィンドウで[追加]を選択します。
名前フィールドにユーザー名を入力します。
PIN の設定を選択して、ユーザーの PIN を設定します。PIN は 0000~9999 の範囲の4桁の数字でなければなりません。
開いた PINの設定 ダイアログウィンドウで、両方のフィールド(PINの設定とPIN の 繰り返し)のPINが一致する必要があります。
[OK] を選択します。
ユーザーのリストで、有効にするユーザー名の右にあるチェックボックスを選択します。
PIN が有効になると、構成したアイドル時間の後にコントローラが自動的にロックされます。
PIN を無効にするには、無効にするユーザー名の右にあるチェックボックスをクリアします。
ユーザー / PIN の削除
ユーザーのリストで、削除する各ユーザー PIN のチェックボックスをマークして、削除ボタンを選択します。
PIN でロックされている場合のコントローラへのアクセス
有効な PIN でコントローラーにアクセスすると、PIN を求めるプロンプトが表示されます。これは、Web GUI またはコントローラ GUI を介してコントローラにアクセスする場合です。
ツールサービスアラーム
設定メニューにはツールセクションがあり、サービスインジケータアラームと校正アラームを表示する、ツールアラームを選択するために使用されます
ツールアラームを設定するには:
プラント構造
でコントローラを選択します。 設定
に移動します。ワークスペースエリアに設定メニューが表示されます。
パラメータ | 説明 | デフォルト | 位置 |
|---|---|---|---|
点検インジケータアラーム | スイッチで選択されます。 アラームをオン、またはオフにします。サービス間隔に達するとアラームがトリガされます。 | オフ | |
較正アラームの表示 | スイッチで選択されます。 指定期間内にツールが較正されていない場合較正アラームがトリガされます。最終較正日はツールメニューで確認できます。デフォルト設定の間隔は 1 年ですが、コントローラ GUI または Web GUI から変更可能です。 | オフ |
サーバー接続
ToolsNet サーバーとのコントローラの通信
コントローラは常に締め付け結果をToolsTalk 2に送信します。コントローラは、さらに処理を行うために、ToolsNet に結果を送信することもできます。ToolsNet 8サーバに対するアドレスは、コントローラで構成する必要があります。
コントローラと ToolsNet サーバー間の通信を設定するには:
プラント構造
でコントローラを選択します。設定
に移動します。ワークスペースエリアに設定メニューが表示されます。
ToolsNet に移動して、ToolsNet サーバーとの通信を有効または無効にします。
通信を有効にする場合、サーバーの IP アドレスとポート番号を設定します。
パラメータ | 説明 | デフォルト | コメント |
|---|---|---|---|
ToolsNet が有効です | サーバーとの通信を有効/無効にします | オフ | |
サーバーホスト | ToolsNet サーバーの IP アドレス。 |
| 通信は有効化されています。 |
サーバーポート | ToolsNet サーバーポート。 |
| 通信は有効化されています。 |
コントローラの日時
各コントローラは、正確なレポート作成のためにその時刻と日付がプログラムされている必要があります。
プラント構造ワークスペース
でコントローラを選択します。[設定
]タブに移動します。ワークスペースエリアには、一般設定メニューが表示されます。
時間参照のソースを選択します。
選択した時間ソースに応じて、追加のパラメータを入力します。
タイムゾーンショートカットメニューから、コントローラのローカルタイムゾーンを選択します。
時間を最も正確にし、安定させるため、すべてのコントローラと通信できる NTP サーバーの使用を推奨します。
時間ソースはショートカットメニューから選択され、次のいずれかにできます。
コントローラに日時を手動で入力。これはすべての GUI インターフェースから可能です。
標準化されているネットワークタイムプロトコル (NTP) の使用。接続されているコントローラへのサーバー配信時間参照。2 つまでの異なる NTP サーバーに構成できます。
コントローラが接続され、ToolsNet サーバーにオンラインの場合の、時間参照としての ToolsNet サーバーの使用。ToolsNet を時間参照として使用する場合、サーバーとコントローラが異なるタイムゾーンにあっても、同じタイムゾーンに設定されていることが重要です。
日付と時間を追加して構成するには:
パラメータ | 状態 | 説明 |
|---|---|---|
ソース | ショートカットメニューから選択します。 コントローラの時間と日付を構成する方法を選択します。 | |
タイムゾーン | ショートカットメニューから選択します。 コントローラのあるタイムゾーンを選択します。 | |
Time (時間) | ソース = 手動 | 時間:分:秒の形式で時間を入力します。 |
Date (日付) | ソース = 手動 | カレンダーの記号から日付を入力します。 |
設定コマンドボタン | ソース = 手動 | 入力された日時をコントローラに送信します。このコマンドを実行するには、コントローラがオンラインである必要があります。 |
追加コマンドボタン | ソース = NTP | 追加 NTP サーバーアドレスを追加します。 |
削除コマンドボタン | ソース = NTP | 選択された NTP サーバーアドレスを削除します。 |
NTP サーバー | ソース = NTP | NTP サーバーの IP アドレスを入力します。 |
イベントメニュー
イベントは、オペレーターに報告されるエラーなど、操作の状態やその他の情報です。すべてのイベントは構成でき、異なる重要度を指定できます。
イベントタイプ | 機能 |
|---|---|
ディスプレイ | イベントには、情報を通知するものがあり、コントローラ画面に短時間表示されます。 |
ログ | イベントには、情報を通知するものがあり、コントローラ画面に短時間表示され、ログファイルに書き込まれます。これらは [イベント] |
確認 | イベントはオペレーターの確認を得る必要があります。イベントを確認するには、オペレーターはアクセサリーのボタンを押すか、コントローラのタッチ画面をタップするか、Web GUI からイベントを確認する必要があります。 |
イベント構成は、各イベント信号の取り扱い方法を決定します。
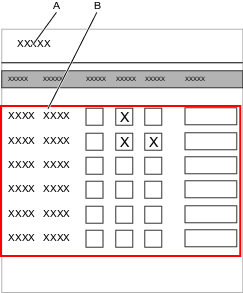
A | イベント検索ウィンドウ | B | イベントリスト |
すべての取得可能イベントはリファレンスの章で一覧にまとめられています。イベントには 2 つのカテゴリがあります。
アトラスコプコが定義する標準イベントは各成果物に取得可能です。
カスタムイベントは顧客要請があった際にアトラスコプコが実施し、特定の顧客に対してのみ有効かつ取得可能になっています。
イベント構成
プラント構造ワークスペース
でコントローラを選択します。[設定]
タブに移動し、[イベント] を選択します。検索ウィンドウを使用して特定のイベントを検索するか、セクションを選択して展開し、イベントをスクロールして目的のイベントコードを見つけます。
次の 1 つまたは複数を選択または選択解除します。
イベントが表示され、オペレーターによって確認されるようにするには、確認。
イベント
 が表示され、ログファイルに書き込まれるようにするには、ログ。
が表示され、ログファイルに書き込まれるようにするには、ログ。
イベントが画面に表示されるようにするには、表示。
詳細フィールドは、顧客を特定したコメントを書き込むのに使用できます。
準備が完了したら、変更を特定のコントローラにプッシュ配信します。
構成する各コントローラーごとにステップの 3 - 5 を繰り返します。
イベントコード番号 0000 ~ 7999 は標準イベントです。
イベントコード番号 8000 ~ 9999 は顧客特定のイベントです。
ライブラリへのイベント追加
設定
を選択し、イベント構成タブで 管理を選択します。ドロップダウンリストから ライブラリに追加を選択します。グローバル構成の作成 ダイアログボックスが開き、次の 2 つの構成オプションが表示されます。
自動で元に戻すが規定で設定されています。
リンク解除
作成 を選択すると、イベント設定がロックされ、グローバルイベントライブラリに表示されます。
アクション | 結果 |
|---|---|
自動で元に戻す | ToolsTalk 2でプログラムがグローバルイベントとしてマークされている場合、コントローラーの GUI または Web GUI を使用したイベントの更新は無視されます。 更新が行われ、ToolsTalk 2 に送り返されます。この場合、変更は認識されますが、承認されません。すると当初のグローバルイベントプログラムは、コントローラに即座にプッシュして返送されます。 |
リンク解除 | コントローラ GUI または Web GUI からイベントを更新すると、影響するコントローラのプログラムがグローバルイベントからローカルイベントに変わります。 更新が行われ、ToolsTalk 2 に送信され、変更が認識されます。その結果、イベントはコントローラへの配信リストから即座に削除されます。 |
グローバルイベントがコントローラに配信されるように構成されている場合には、自動で元に戻すことまたはリンク解除を選択する必要があります。後で選択を変更することはできません。
フィールドバス、SoftPLC、非周期データタブの操作
フィールドバス、非周期、SoftPLCは、プラント構造 で単一のコントローラが選択されている場合、フィールドバスとSoftPLC
タブにあります。
フィールドバスは、工場管理システム(フィールドバスマスター)とリモートノード(フィールドバスの下位)の間の通信リンクです。
フィールドバスとSoftPLCは4つのセクションに分かれています。
概要
フィールドバス
SoftPLC
非周期
フィールドバスの概要
フィールドバス通信を使用する一般的な工場管理制御システムがコントローラと通信する場合、次のようになります。
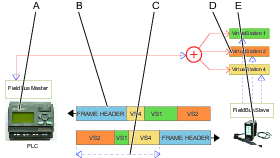
A | フィールドバスマスター (PLC) | B | フレームの見出し |
C | プロセスデータフレーム内の複数の仮想ステーションとのユーザーデータの送受信 | D | 仮想ステーション |
E | 複数の仮想ステーションを持つコントローラ |
通常 PLC であるフィールドバスマスターは、フィールドバス下位と呼ばれる多数のリモートノードと情報を交換します。マスターは、一度に 1 つの下位と通信します。マスターは下位にフレームを送信し、応答として別のフレームを受信します。
PLCはAnybusモジュールにデータを送信し、コントローラと通信します。コントローラには、識別データ、タスク選択情報、その他の信号が含まれます。
コントローラは、イベント信号、ステータス信号、締め付け結果、その他の信号を含む可能性のあるAnybusモジュールを介してPLCに応答を送信します。
プロセスデータの更新頻度は異なる場合があります。コントローラとAnybusモジュール間の更新周波数は約100Hzであり、AnybusモジュールとPLC間の更新周波数は約500Hzです。
物理的な伝送リンクは、選択されたフィールドバスタイプによって異なります。伝送は、アドレス情報を含むフレームの見出しと、すべてのデータを含むプロセスデータフレームで構成されます。
コントローラが仮想ステーションをサポートする場合、正しい情報を各仮想ステーションに指定することが重要です。プロセスデータフレームには、1 つ以上のフィールドバスマップ (各仮想ステーションに 1 つ) を含むことができます。
フィールドバス構成パラメータ
最下位ビットの位置を定義することで、項目はフィールドバスマップに配置されます。この位置はバイト番号とビット番号で識別されます。
情報 | 説明 |
|---|---|
開始バイト | 項目の最下位バイトがあるバイト番号。0 から、サイズマイナス1の数の範囲の数値。 番号は 0 から始まります。最下位バイトまたはビットは 0 です。 |
開始ビット | 項目の最下位ビットが配置されているビット番号。前に選択された開始バイトから始まります。0 から 7 の範囲の数値。 番号は 0 から始まります。最下位バイトまたはビットは 0 です。 |
長さ | 項目のビット数を表す数値。 |
範囲 | 情報のみ。選択した項目の最小の長さ、最大の長さ、デフォルトの長さの情報を示します。 |
コンバーター | 使用可能な信号コンバータのドロップダウンリスト。デジタル形式での項目の表示方法について、SoftPLC に要件がある場合に使用されます。 |
項目コンバーターは、異なるデータ型に項目を変換するのに使用されます。
情報 | 説明 |
|---|---|
ブール値反転 | 有効高 (1) から有効低 (0) にデジタル信号を反転させます。 |
固定小数点 |
|
フィールドバスの定義
項目はデジタル信号です。コトンローラの参照セクションでの説明どおり、信号などになります。
締め付け OK などの情報の信号ビット。
イベントコードなどの情報の数ビット。
項目は、コンバーター値、識別番号、締め付け結果を表す情報の数ビットになります。
項目は文字による文字列で指定できます。
情報 | 説明 |
|---|---|
フィールドバス項目 | ブール値: 信号はシンプルなブール値表現で、1 つの単一ビット位置を占めることができます。 例には、デジタル IO 信号があります。 |
整数: データは配列のデータの 1 ビット以上を占めます。 | |
文字または文字列: 信号は、英数字の文字による文字列で、1 バイト以上の位置を占めることができます。 |
情報 | 説明 |
|---|---|
フィールドバスマップ | データの配列。サイズはバイトの偶数で指定してください。フィールドバスマップは、フィールドバスメニューのフィールドバスウィンドウで作成されます。フィールドバス項目はフィールドバスマップに配置され、マスターと下位間の通信用の一意な配列を作成します。項目は、開始位置と長さをビット数で表して定義することによって配列に配置されます。 |
プロセスデータフレーム | データの配列。サイズは偶数のバイトで指定してください。プロセスデータフレームは、フィールドバスメニューのフィールドバス ウィンドウで作成されます。フィールドバスマップは、仮想ステーションに割り当てられると、プロセスデータフレームに配置されます。フレーム内のマップの位置は、オフセットで定義され、フレームの最初から計算されます。 |
フィールドバス構成 | フィールドバスマッピング構成は、フィールドバス メニューのフィールドバス ウィンドウで行われます。構成パラメータは一般的なパラメータとタイプ特有のパラメータの両方で構成されます。 パラメータ入力ボックスのリストは、フィールドバスタイプが選択されてから表示されます。 |
情報 | 説明 |
|---|---|
オフセット | ポインター変数。信号はシンプルなブール値表現で、1 つの単一ビット位置を占めることができます。 例には、デジタル IO 信号があります。 |
開始バイト | ポインター変数。項目の LSB を含むフィールドバスマップ内のバイトを指します。 |
開始ビット | ポインター変数。項目の LSB を含むフィールドバスマップ内の以前に定義されたバイトのビットを指します。 |
項目の長さ | ビット数で表すサイズ変数。 |
LSB | 最下位のビットまたはバイト。 |
名前 | 説明 |
|---|---|
フィールドバスの送信 | ネットワーク上で送信されるデータグラム。送信ノードは、アドレス情報を含むフレームの見出しを、ネットワークに送信されるプロセスデータフレームに組み合わせます。受信ノードは、フレームの見出しでそのアドレスを検出し、プロセスデータフレームを取得します。 |
フレームヘッダー | ネットワークでエラーのない送信を行うためのネットワークアドレス情報とその他のデータ |
フィールドバスマスター | 通常、フィールドバスの下位への通信を開始する PLC です。マスターはデータフレームを送信し、下位から別のフレームを受信します。 |
フィールドバスの下位 | フィールドバスマスターから送信に応答するリモートノード。下位が送信を検出すると、フレームを受信し、送信元への返信で別のフレームを送信して応答します。 |
フィールドバスのデータ型
各フィールドバスには、バスを介して転送できるデータ量に関する独自の容量があります。
周期データ: 周期データ(「暗黙的」または「重要」データとも呼ばれる)は、通常、 開始、 停止、 OK、 NG 信号などのPLCデータ/プロセスデータです。周期的なデータ転送は、マスターとコントローラのフィールドバス間で定期的に(たとえば、100ms)発生します。動作に重要なコマンドが含まれているため、できるだけ頻繁に更新する必要があります。
非周期データ: 非周期的データ(「情報」とも呼ばれます)は通常、締め付けデータです。非周期データは周期データフィールドバスマッピング外にあり、非周期データ転送はマスターからコントローラフィールドバスへの要求時にのみ行われます。
非同期データ:非同期データは、周期データ転送の一部であり、マッピングの一部である締め付けデータであり、非周期データ(CC Link)をサポートしないフィールドバスタイプ用データです。非同期データ機能を使用すると、パッケージ内の周期データを含む締め付け結果をフィールドバス経由でPLCに送信することができます。次に、PLC はすべてのパッケージを 1 つの締め付け結果にマージします。コントローラからの非同期データはPFからのフィールドバスAsyncData I/O信号と通信し、非同期データはPFへのフィールドバスAsyncData I/O信号と共にコントローラに伝達されます。これらの信号は、非周期データで行われるのと同じタイプのハンドシェイクである、非同期データハンドシェイクに使用されます。PFからのフィールドバスAsyncDataのサイズは、インスタンスサイズまたはレコードサイズと見なすことが可能です。各非同期データハンドシェイク要求ごとに転送されるデータのバイト数を示します。
たとえば、非周期データの合計構成が1024バイトで、 PFへのフィールドバスAsyncDataが64バイトに設定されている場合、非同期データの合計は、毎回16回 X 64バイト送信されます。つまり、PLCからの要求ごとに、コントローラは合計非同期データから得られた次の64バイトのデータをPFへのフィールドバスAsyncDataに書き込みます。
理論的には、 PFからのフィールドバスAsyncDataを2バイト長として定義すると、最大32Kバイトのデータを送信できます(16Kデータ要求が必要となります)。
フィールドバスサイズ
アイテム | DeviceNet | イーサネット/IP | Profinet I/O | Profibus DP-V1a | CC リンク | CC link IE | |
|---|---|---|---|---|---|---|---|
a Profibus DP-V1の場合のみ:非周期データの転送速度は~1 kB/sです。締め付けをトリガーする頻度に応じて、この速度は転送できる非周期データの量のボトルネックとなります。たとえば、3秒ごとに締め付けを実行する場合は、締め付け当たり3kBを超える転送を試みるべきではありません。 | |||||||
最大周期データ (読み取り + 書き込み) | 512 | 512 | 512 | 128(368) | 該当せず | 512 | |
最小周期データ(読み取り+書き込み) | 0 | 0 | 0 | 1 | 該当せず | 0 | |
最大周期データ (書き込み) | 256 | 256 | 256 | 128(244) | 該当せず | 256 | |
最小周期データ(書き込み) | 0 | 0 | 0 | 0 | 該当せず | 0 | |
最大周期データ (読み取り) | 256 | 256 | 256 | 128(244) | 該当せず | 256 | |
最小周期データ(読み取り) | 0 | 0 | 0 | 0 | 該当せず | 0 | |
最大非周期データ (読み取り + 書き込み) | 65535 | 65535 | 65535 | 65535 | 該当せず | 65535 | |
最小非周期データ(読み取り+書き込み) | 0 | 0 | 0 | 0 | 該当せず | 0 | |
最大非周期データ (書き込み) | 65535 | 65535 | 65535 | 65535 | 該当せず | 65535 | |
最小非周期データ(書き込み) | 0 | 0 | 0 | 0 | 該当せず | 0 | |
最大非周期データ (読み取り) | 65535 | 65535 | 65535 | 65535 | 該当せず | 65535 | |
最小非周期データ(読み取り) | 0 | 0 | 0 | 0 | 該当せず | 0 | |
CC Link バージョン 1
使用中のステーション | ビットポイント(ビット) | ワードポイント (ワード) | 合計(ビット + ワード、バイト単位) |
|---|---|---|---|
1 | 32 | 4 | 12 |
2 | 64 | 8 | 24 |
3 | 96 | 12 | 36 |
4 | 128 | 16 | 48 |
CC Link バージョン 2
使用中のステーション | 1 延長サイクル | 2 延長サイクル | 4 延長サイクル | 8 延長サイクル | ||||
ポイント | 合計 | ポイント | 合計 | ポイント | 合計 | ポイント | ポイント | |
1 | 32 ビット | 12 バイト | 32 ビット | 20 バイト | 64 ビット | 40 バイト | 128 ビット | 80 バイト |
4 ワード | 8 ワード | 16 ワード | 32 ワード | |||||
2 | 64 ビット | 24 バイト | 96 ビット | 44 バイト | 192 ビット | 88 バイト | 384 ビット | 176 バイト |
8 ワード | 16 ワード | 32 ワード | 64 ワード | |||||
3 | 96 ビット | 36 バイト | 160 ビット | 68 バイト | 320 ビット | 136 バイト | 640 ビット | 272 バイト |
12 ワード | 24 ワード | 48 ワード | 96 ワード | |||||
4 | 128 ビット | 48 バイト | 224 ビット | 92 バイト | 448 ビット | 184 バイト | 896 ビット | 368 バイト |
16 ワード | 32 ワード | 64 ワード | 128 ワード | |||||
概要構成タブ
フィールドバス設定
接続状態は、次のステータスメッセージを表示することがあります。
ステータス | 説明 |
|---|---|
Fieldbus_Online | フィールドバスモジュールはオンライン。コントローラとフィールドバスマスター間の通信は有効です。 |
Fieldbus_Offline | フィールドバスモジュールはオフライン。コントローラとフィールドバスマスター間の通信は無効です。 |
Fieldbus_NoModuleInstalled | コントローラにフィールドバスモジュールが検出されません。 |
Fieldbus_NotConfigured | フィールドバスモジュールがコントローラに検出されましたが、モジュールは構成されていません。 |
Fieldbus_Initializing | フィールドバス状態がリセット中であるか、グローバルパラメータが変更された結果です。定常状態が表示されるまでの一時的な状態です。 |
フィールドバス状態は次のエラーを示すこともあります。
エラーコード | 説明 | アクション |
|---|---|---|
Fieldbus_ModuleMismatch | サポートされているモジュール。パラメータの不一致が検出されました。 | エラーログを読むにはアトラスコプコに連絡してください。 |
Fieldbus_UnsupportedModuleInstalled | サポートされていないフィールドバスモジュール。 | エラーログを読むにはアトラスコプコに連絡してください。 |
Fieldbus_ConfiguredModuleNot Installed | 構成データが作成されました。モジュールが検出されませんでした。 | エラーログを読むにはアトラスコプコに連絡してください。 |
Fieldbus_Unexpectedconfigurationerror | コントローラと ToolsTalk 2間の不一致。 | エラーログを読むにはアトラスコプコに連絡してください。 |
フレームサイズやフィールドバスモジュールアドレスなどの一部のグローバルパラメータを変更すると、フィールドバスモジュールがリセットされます。
プラント構造ワークスペース
でコントローラを選択します。メニューバーの フィールドバスとSoftPLC
を選択し、概要サブタブを選択します。フィールドバスの設定で、ドロップダウンメニューから [フィールドバスの種類] を選択します。
送受信の両方向のフレームサイズ 全体のサイズをバイトで入力します。値は偶数の整数で指定します。
フィールドバスタイプに特定のパラメータを入力します。
フィールドバスパラメータ一般
フィールド | 説明 | デフォルト値 |
|---|---|---|
フィールドバスタイプ | ドロップダウンメニューからフィールドバスタイプを選択します:
| 未定義 |
更新間隔 | プロセスデータフレームが送信される頻度を設定します。値はミリ秒で表されます。最小値は 100 ミリ秒です。 |
|
フィールドバスがオフラインの場合はツールをロック | 選択スイッチのオン-オフ。フィールドバスモジュールでフィールドバスマスター (PLC) との通信が切断されると、コントローラによって行われる動作を決定します。 | オフ |
結果応答確認の読み取り | 選択スイッチのオン-オフ。オンにすると設定はすべての仮想ステーションに影響します。信号の結果応答確認の読み取りは、フィールドバス構成にマッピングされる必要があります。 確認する結果なしの場合の結果は、PLC に直ちに送信されます。 確認する結果はキューに入れられ、確認されるとクリアされ、キューの次の結果が送信されます。結果がクリアされてからキューの次の結果までの時間は、一般フィールドバス設定で設定されたフィールドバスのサイクル時間によって異なります。設定が変更されるか、仮想ステーションのフィールドバスマッピングが変更されると、キューにある結果はフラッシュされ、PLC には送信されません。 | オフ |
ネットワークで設定 | 選択スイッチのオン-オフ。フィールドバスモジュール通信の構成方法を決定します。
| オフ |
選択したタスクで同期 | オフ | |
バイト順の周期データ | 周期データに使用するバイトの順序を選択します。
| ネットワークで設定 |
バイト順の非周期データ | 非周期データに使用するバイトの順序を選択します。
| モトローラ(大) |
非同期データを自動的に読み込む | 選択スイッチのオン-オフ。オンにすると、非同期データの最初で唯一のパッケージが自動的にロードされます。 この機能を有効にする場合、フィールドバスマスターは、新しいサイクルを開始する前にデータの読み取りが完了していることを確認する必要があります。 | オフ |
ハンドシェイクプロトコルなしで締め付け結果を構成する
各スピンドルの最終角度と最終トルクで非周期構成を構成します。
信号「コントローラからのフィールドバスAsyncData」(送信元コントローラタブ内)でフィールドバス構成を構成します。
フィールドバス構成と非周期構成の両方を仮想ステーションにマッピングします。
一般フィールドバス構成で、[非同期データを自動的に読み込む] = [オン]を選択します。
締め付け後、ユーザーは信号、「コントローラからのフィールドバスAsyncData」結果を得ることができます。
DeviceNet のフィールドバスパラメータ
以下の表は、DeviceNetの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
フィールドバスノードアドレス |
|
|
ボーレート | 通信リンクの速度。ドロップダウンメニューから速度を選択します。 125 kbps、250 kbps、500 kbps、自動。 | 自動 |
接続モード | フィールドバスマスター (PLC) と下位コントローラ間の通信の種類を選択します。ドロップダウンメニューから選択します。
|
|
送信先コントローラ | 受信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの受信フレームを組み合わせたものです。サイズはバイト数で表します。 | |
送信元コントローラ | 送信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの送信フレームを組み合わせたものです。サイズはバイト数で表します。 |
EtherNet/IP のフィールドバスパラメータ
以下の表は、EtherNet/IPの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
フィールドバスノード IP アドレス | 0.0.0.0 の形式です。 |
|
サブネットマスク | 0.0.0.0 の形式です。 |
|
Gateway (ゲートウェイ) | 0.0.0.0 の形式です。 |
|
送信先コントローラ | 受信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの受信フレームを組み合わせたものです。サイズはバイト数で表します。 | |
送信元コントローラ | 送信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの送信フレームを組み合わせたものです。サイズはバイト数で表します。 |
ProfinetIO のフィールドバスパラメータ
以下の表は、ProfinetIOの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
デバイス名 | デバイスの名称 | |
フィールドバスノード IP アドレス | 0.0.0.0 の形式です。 |
|
サブネットマスク | 0.0.0.0 の形式です。 |
|
Gateway (ゲートウェイ) | 0.0.0.0 の形式です。 |
|
送信先コントローラ | 受信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの受信フレームを組み合わせたものです。サイズはバイト数で表します。 | |
送信元コントローラ | 送信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの送信フレームを組み合わせたものです。サイズはバイト数で表します。 |
デバイス名のパラメータは PROFINET のフィールドバスモジュールを識別し、RFC 5890 で説明されている構文を使用します。
Profibus のフィールドバスパラメータ
以下の表は、Profibusの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
選択したタスクで同期 | 有効な場合、フィールドバスフレームはタスクの変更時に再同期されます。 | |
拡張モード | 下位互換性のある152バイトのデータモードと368バイトのデータモードのどちらかを選択します:
| |
フィールドバスノードアドレス |
|
|
ADIの最大サイズ | 最大値として設定するさまざまなアプリケーションデータのインスタンスサイズから選択します。 データの整合性は、単一のADIにマップされたデータに対してのみ保証されます。つまり、送信されるデータが大きい場合、または2つのADIに分割された場合、データの整合性は保証されません。送信されたデータタイプのサイズと等しい最大ADIサイズを設定し、合計フレームサイズに正しくマッピングすると、データの整合性が保証されます。 周期データの送信に使用する最大データサイズ。フィールドバスマスターで使用されるデータサイズと一致する必要があります。最大ADIサイズは、そのサイズ未満のADIがマップに残るようになるまで使用されます。たとえば、最大ADIサイズが8バイトに設定されている場合、8バイト未満になるまでそのサイズがマッピングに使用され、残りのデータの転送には4、2、1バイトが使用されます。 | |
送信先コントローラ | 受信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの受信フレームを組み合わせたものです。サイズはバイト数で表します。 | |
送信元コントローラ | 送信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの送信フレームを組み合わせたものです。サイズはバイト数で表します。 |
CC リンクのフィールドバスパラメータ
以下の表は、CC Linkの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
ボーレート | 通信リンクの速度。ドロップダウンメニューから速度を選択します。 156 キロビット/秒、625 キロビット/秒、2500 キロビット/秒、5 メガビット/秒、10 メガビット/秒。 | 156 キロビット/秒 |
フィールドバスノードアドレス | ネットワーク内の各ユニット別の固有アドレス | |
バージョン | バージョン 1: 既定では、マッピングされたプロセスデータに基づいて、必要な占有ステーション数が自動的に計算されます。 バージョン 2: CC-Linkにネットワーク設定を実装することで、CC-Linkバージョン2の実装をカスタマイズし、拡張サイクルを通じてより大きなデータサイズを使用することができます。 | |
使用中のステーション | どのバージョンが選択されているかによって異なるパラメータ設定。これは、[拡張サイクル] パラメータと組み合わせて使用します。 | |
延長サイクル | 大きなデータサイズの送信に使用されるパラメータ設定。バージョンパラメータおよび使用中ステーションパラメータと組み合わせて使用されます。 | |
送信先コントローラ | 受信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの受信フレームを組み合わせたものです。サイズはバイト数で表します。 | |
送信元コントローラ | 送信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの送信フレームを組み合わせたものです。サイズはバイト数で表します。 |
CC Link IEのフィールドバスパラメータ
以下の表は、 CC Link IEの特定のパラメーターのみを一覧表示しています。一般的なパラメータについては、「フィールドバスパラメータ一般」を参照してください。
フィールド | 説明 | デフォルト値 |
|---|---|---|
ステーション番号 | ネットワーク上の各デバイスには、一意のステーション番号を割り当てる必要があります。 | |
ネットワーク番号 | ネットワークは、アドレス指定に使用される一意のネットワーク番号を持つ複数の部分に分割できます。 | |
送信先コントローラ | 受信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの受信フレームを組み合わせたものです。サイズはバイト数で表します。 | |
送信元コントローラ | 送信プロセスデータフレームの合計。フレームサイズは、すべての仮想ステーションの送信フレームを組み合わせたものです。サイズはバイト数で表します。 |
一般フィールドバス設定の非周期データ
データインスタンスサイズの追加
フィールドバス設定では、ユーザーはデータインスタンスサイズを設定できます。これは、サイズスパンの計算に使用される一般的な値です。インスタンスは、非周期データの最初のバイトを読み取る場所を定義します。
これは、次のフィールドバスタイプでのみ可能です。
EtherNet IP
DeviceNet
Profinet IO
Profibus
CC Link IE
プラント構造
でコントローラを選択します。 [フィールドバスとSoftPLC]タブ
に移動します。[概要]サブタブを選択します。
[データインスタンスサイズ]フィールドに値を入力します。
データインスタンスサイズの値は、インスタンスの大きさを定義します。これは、仮想ステーションを使用した非周期フィールドバスマッピングのすべてのインスタンスで一般的なものです。既定:64、最大:255(256バイト)。
CC Link のサイズスパン計算は自動的に行われます。
非周期フィールドバスマッピングの削除
[仮想ステーションマッピング構成]エリアで[コントローラから非周期]タブを選択します。
削除する必要があるフィールドバスマッピングのチェックボックスをオンにして、[削除]を選択します。
SoftPLC設定
サイズ
PLCのフィールドバスに割り当てられた受信および送信のサイズは、[送信先コントローラ]および[送信元コントローラ] のフィールドで設定できます。
PLCのフィールドバスが構成されていない場合、フレームサイズは受信サイズと送信サイズの両方で0と表示されます。
オフセット
フィールドバスマップ同士の順序は手動で変更でき、 フィールドバスマップ同士の間隔も制御できます。この 2 つの両方の機能は、オフセットパラメータで制御されます。この値は、プロセスデータフレーム配列のフィールドバスマップの開始位置を定義します。
オフセットの変更
送信先コントローラセクションで、プロセスデータフレーム内でフィールドバスマップのオフセットを入力します。
送信元コントローラセクションで、プロセスデータフレーム内でフィールドバスマップのオフセットを入力します。
検証は自動的に行われます。新しいオフセット値が受け付けられると、黒のテキストで表示されます。値が受け付けられない場合は、エラーメッセージが赤のテキストで表示され、違反したオフセット規則に関する情報が示されます。
開始アドレスは偶数で指定します。
仮想ステーションマッピング構成
コントローラの仮想ステーションとフィールドバスマスターは、相互にフィールドバスマップを交換して通信します。
1 つ以上のフィールドバスマップがプロセスデータフレームに組み合わされ、コントローラとフィールドバスマスター間の物理通信リンクに送信されます。
列 | 機能 |
|---|---|
チェックボックス | マッピングの選択または選択解除。 |
仮想ステーション | 仮想ステーションの名前。 |
フィールドバス構成 | フィールドバスマップ。 |
コントローラオフセット 送信先/送信元 | プロセスデータフレーム内のフィールドバスマップの開始点。 |
列 | 機能 |
|---|---|
チェックボックス | マッピングの選択または選択解除。 |
仮想ステーション | 仮想ステーションの名前。 |
非周期構成 | 非周期データマップ。 |
開始インスタンス | 非周期データの最初のインスタンス番号。デフォルト/最小インスタンス番号:2048. |
終了インスタンス | 非周期データの最後のインスタンス番号。最大インスタンス番号:65535. インスタンスの最大サイズは、フィールドバスの種類によって異なります。 |
インスタンス数 | 非周期データを送信するために必要なインスタンスの数。たとえば、 データインスタンスのサイズが64に設定されており、 開始インスタンスが2048で終了インスタンスが2060 の場合、インスタンス数は13で、非周期構成の最大サイズは832バイトになります。インスタンス数は、 開始インスタンスと終了インスタンスに基づいて自動的に生成されます。 |
バイト単位のサイズ | 選択したデータインスタンスサイズ 、 開始インスタンス 、および終了インスタンスに基づく非周期構成の最大サイズ。 |
非周期データの合計サイズは65536バイトを超えてはなりません。
仮想ステーションには、1つの非周期フィールドバス構成のみをマッピングできますが、非周期フィールドバス構成は多くの仮想ステーションにマッピングできます。
フィールドバスマッピングの追加
プラント構造
でコントローラを選択します。 フィールドバスとSoftPLC
に移動します。概要タブを選択します。
[送信先コントローラ]または[送信元コントローラ]を選択します。[仮想ステーションマッピング構成]フィールドで[追加]を選択して、コントローラへの、またはコントローラからのフィールドバスマッピングを追加します。
[フィールドバス] タブを選択し、ドロップダウンメニューから [仮想ステーション] と [フィールドバス構成] を選択します。
フィールドバス信号構成は、 フィールドバスサブタブで作成されます。
追加を選択します。
これで、フィールドバスのマッピングが [仮想ステーションマッピング構成]に表示されます。
非周期フィールドバスマッピングの追加
プラント構造
でコントローラを選択します。 フィールドバスとSoftPLC
に移動します。概要タブを選択します。
[コントローラから非周期]を選択し、 仮想ステーションのマッピング構成で[追加]を選択します。
[非周期フィールドバス] タブを選択し、ドロップダウンメニューから [仮想ステーション] と [非周期フィールドバス構成] を選択します。
非周期フィールドバス構成は、 非周期サブタブ内に作成されます。
追加を選択します。
フィールドバスマッピングは、[コントローラからの非周期]タブにある[仮想ステーションマッピング構成]領域に表示されます。
フィールドバスマップは、仮想ステーションに割り当てられた順番、またはフィールドバスマップが入る最下位の入力ポイントで、プロセスデータフレームに配置されます。
開始および終了インスタンスの編集
フィールドバスマッピングの開始インスタンスと終了インスタンスは編集できます。
開始インスタンスと終了インスタンスは、非周期フィールドバス構成の開始位置と終了位置を定義する固定位置です。正しい範囲を入力することが重要です。
[仮想ステーションマッピング設定] フィールドで、[コントローラからの周期] タブを選択します。
必要に応じて、開始インスタンスと終了インスタンスの値を編集します。
正しい値が入力されていない場合、「フィールドバスフレームは内容に適合する必要があります」という警告が表示されます。
最小/最初の非周期データインスタンス番号
フィールドバス | 送信先コントローラのインスタンス番号 | コントローラからのインスタンス番号 |
|---|---|---|
Profinet-IO | 1024 | 2048 |
Profibus-DP | 1024 | 2048 |
イーサネット/IP | 32768 | 4096 |
DeviceNet | 1024 | 2048 |
CC リンク | サポートされていません | サポートされていません |
CC-Link IE | 1024 | 2048 |
各締め付け後、構成されたアイテムの測定値は、PLCがシステムから読み取る非周期データとして利用できます。データは、締め付けのたびに新しい値で更新されます。
サイクル完了の信号を「高」に設定すると、データを読み取る準備が整います。データは、次の締め付けが開始されるまで、つまり入力信号開始が送信されるまで有効です。
PLCは一連の GET_RECORD コマンドを発行して、すべてのデータを収集します。
仮想ステーションに割り当てられたフィールドバスマップの表示
フィールドバスマップの仮想ステーションへの割り当て方法を表示するには:
プラント構造ワークスペース
でコントローラを選択します。 フィールドバスと SoftPLC
タブを選択し、概要サブタブを選択します。
フィールドバス仮想ステーションマッピング構成メニューに、フィールドバスマップのリストと、割り当てられている仮想ステーションが表示されます。コントローラーオフセット送信先列は、フィールドバスマップが開始されるプロセスデータフレームのアドレスをポイントします。
フィールドバス構成タブ
プラント構造ウィンドウ
でコントローラを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。[フィールドバス] サブタブを選択して、マップのリストを表示するか、新しいフィールドバスマップを作成します。
列 | 説明 |
|---|---|
| チェックボックス。 |
名前 | 名前: マップの名前を示します。名前は受信マップと送信マップで同一です。 |
送信先サイズ | 仮想ステーションに受信するマップのサイズ。値は偶数のバイト数である必要があります。 |
送信元サイズ | 仮想ステーションから送信するマップのサイズ。値は偶数のバイト数である必要があります。 |
ライブラリのリンク | グローバルライブラリへのリンクの有無。 |
最終変更 | ToolsTalk 2 時間で表される最終変更が行われた時刻。 |
変更者 | 最後に変更した人。 |
コントローラ更新 | コントローラ時間で表したコントローラ更新。 |
コントローラ更新者 | コントローラを更新したのが誰かを知るには。 |
フィールドバスマップの作成、インポート、削除
新しいフィールドバスマップの作成
プラント構造ウィンドウ
でコントローラを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
追加を選択して新しいフィールドバス設定を作成するか、ダブルクリックして既存のフィールドバス設定を編集します。
新しいフィールドバス構成の作成ダイアログウィンドウが開きます。
新規タブを選択します。
構成に名前を付けます。
送信先サイズコントローラパラメータを入力します。これは、バイト数で示される、仮想ステーションに受信するデータフレームのサイズです。値は偶数で指定します。
送信元サイズコントローラパラメータを入力します。これは、バイト数で示される、仮想ステーションから送信するデータフレームのサイズです。値は偶数で指定します。
送信フレームと受信フレームはサイズが異なる場合があります。
セットアップに項目を追加して構成を続行するには、追加を選択します。
入力されたマップサイズは、プロセスデータフレームより大きくできません。
フィールドバスマップのインポート
以前にエクスポートしたフィールドバスマップをテンプレートとして再利用し、コントローラにインポートすることができます。
プラント構造ウィンドウ
でコントローラを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
追加を選択します。
新しいフィールドバス構成の作成ダイアログウィンドウが開きます。
既存のマップを再利用するには、インポート タブを選択します。
ファイルを開く コマンドボタンを選択して、ブラウザウィンドウを開きます。
ファイルを選択します。ファイルの種類は JSON ファイルである必要があります。(*.json).
開くを選択します。ブラウザウィンドウが閉じます。
追加を選択してファイルをインポートします。この操作によってポップアップウィンドウが閉じ、マップのリストが更新されます。
フィールドバスマップの削除
プラント構造ウィンドウ
でコントローラを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
削除する各フィールドバスマップで、フィールドバスワークスペースの左端の列のチェックボックス
を選択します。管理 を選択し、次にドロップダウンリストから 削除 を選択します。
マップのリストが更新されます。
フィールドバス信号構成を作成するには
この領域では、コントローラから、またはコントローラへの新しいフィールドバス信号構成を作成できます。
プラント構造ウィンドウ
でコントローラを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
マップの名前をダブルクリックして表示するか、 追加を選択して新しいマップを作成します。
ワークスペースに構成メニューが表示されます。
フィールドバス構成メニューで送信先コントローラ タブまたは送信元コントローラ タブを選択します。
追加を選択します。
信号構成の作成ダイアログウィンドウが開きます。
リストで項目名を選択して、項目を選択します。
最下位ビットのある場所のバイト番号を入力して、項目の開始位置を設定します。
最下位ビットのある場所のビットを入力して、項目の開始位置を設定します。
項目の長さをビット数で設定します。
ドロップダウンメニューからオプションのコンバーター値を選択します。
追加を選択します。
追加する項目すべてにステップ 6 ~ 11 を繰り返します。
閉じるを選択して追加の操作を終了し、ダイアログウィンドウを閉じます。
項目がマップに手動で配置されない場合、ToolsTalk 2 は項目を最下位位置に配置しようとします。後でマップ内で項目を移動することができます。
フィールドバス構成パラメータ
最下位ビットの位置を定義することで、項目はフィールドバスマップに配置されます。この位置はバイト番号とビット番号で識別されます。
情報 | 説明 |
|---|---|
開始バイト | 項目の最下位バイトがあるバイト番号。0 から、サイズマイナス1の数の範囲の数値。 番号は 0 から始まります。最下位バイトまたはビットは 0 です。 |
開始ビット | 項目の最下位ビットが配置されているビット番号。前に選択された開始バイトから始まります。0 から 7 の範囲の数値。 番号は 0 から始まります。最下位バイトまたはビットは 0 です。 |
長さ | 項目のビット数を表す数値。 |
範囲 | 情報のみ。選択した項目の最小の長さ、最大の長さ、デフォルトの長さの情報を示します。 |
コンバーター | 使用可能な信号コンバータのドロップダウンリスト。デジタル形式での項目の表示方法について、SoftPLC に要件がある場合に使用されます。 |
項目コンバーターは、異なるデータ型に項目を変換するのに使用されます。
情報 | 説明 |
|---|---|
ブール値反転 | 有効高 (1) から有効低 (0) にデジタル信号を反転させます。 |
固定小数点 |
|
非同期データ
非同期データは、締め付け結果などの非周期データをプロセスデータで送信する必要がある場合に使用されます。
PFへのフィールドバスAsyncDataおよびPFからのフィールドバスAsyncDataの信号がフィールドバスマップに追加されて仮想ステーションにマッピングされると、AsyncDataが有効になります。非周期結果構成が同じ仮想ステーションにマッピングされると、結果はAsyncDataに出力され、非同期データには出力されません。
非同期データでの締め付け結果
次のセクションでは、I/O 信号 PF へのフィールドバス AsyncData およびPF からのフィールドバス AsyncDataが使用されている場合における、非同期データを使用したフィールドバス マスターとコントローラ間の通信の例を示します。
締め付けが完了すると、フィールドバスマスターはサイクル完了信号を受信し、締め付け後にサイクル完了信号を受信した際に締め付け結果を取得する準備が整います。
フィールドバスマスターは、I/O信号10077- PFへのフィールドバス AsyncDataを送信し、ここでコントローラによって読み取られる結果データの最初のパッケージを要求します。
コントローラは I/O 信号 107- PFからのフィールドバスAsyncData で締め付け結果のサブパッケージで応答します。
コントローラからの締め付け結果は、フィールドバスフレームの最大サイズより大きくすることは出来ません。
フィールドバスマスターが最初のパッケージの読み取りを完了すると、コマンドPFへのフィールドバスAsyncDataがゼロに設定され、最初のサブメッセージが受信されて読み取られたことを示します。
コントローラは、 PF からのフィールドバス AsyncData という確認メッセージで応答し、新しいサブパッケージの締付け結果を再度要求できます。
フィールドバスマスターはデータフレームを読み取り、シーケンス番号が否定されている場合は要求されたサブパッケージがキューの最後であることを示します。
フィールドバスマスターが締め付け結果を要求し、キューが空の場合、コントローラは空のデータフレームで応答します。
非同期データの構成
プラント構造ウィンドウ
でコントローラを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
マップの名前をダブルクリックして表示するか、 追加を選択して新しいマップを作成します。
ワークスペースに構成メニューが表示されます。
フィールドバス構成メニューで送信先コントローラ タブまたは送信元コントローラ タブを選択します。
追加を選択します。
信号構成の作成ダイアログウィンドウが開きます。
送信先コントローラタブが選択されている場合PFへのフィールドバスAsyncDataを選択します。または送信元コントローラタブが接続されているか場合、 PFからのフィールドバスAsyncData を選択します。
最下位のビットが配置されているバイト数を入力します。
最下位ビットのある場所のビットを入力して、項目の開始位置を設定します。
項目の長さをビット数で設定します。
閉じるを選択して追加の操作を終了し、ダイアログウィンドウを閉じます。
フィールドバス構成とフィールドバスマップを理解する
フィールドバス構成メニューでは、フィールドバスマップを編集できます。項目はマップ内で追加、削除、移動できます。
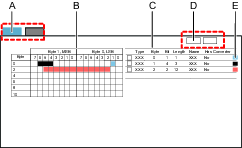
A | タブでは受信マップまたは送信マップを選択します | B | グラフィック表示で項目の配置方法を示すマップ |
C | 表で項目の配置方法を示すマップ | D | マップから項目を追加または削除するコマンドボタン |
E | 項目の配置の色分けされた例 |
リストで行が選択されると、項目がリストとマップでハイライト表示されます。
マップで項目が選択されると、リストとマップでハイライト表示されます。
項目は、単一ビットまたは複数ビットを占めることができます。項目の位置は、常に最下位ビットの開始位置で示されます。開始位置はバイトとビットで示されます。長さのパラメータは、項目の右から左への長さを示します。
項目はポップアップウィンドウで追加または編集されます。
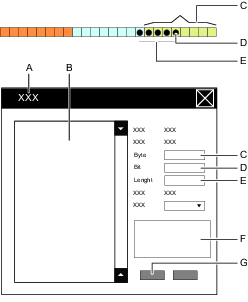
A | 項目の追加または項目の編集のポップアップウィンドウ | B | 使用できる項目のリスト |
C | バイト位置 | D | ビット位置 |
E | 項目の長さのパラメータフィールド | F | 項目情報フィールド |
G | コマンドボタン |
プロセスデータフレームにおけるフィールドバスマップの自動配置
フィールドバスマップは、仮想ステーションに割り当てられると、プロセスデータフレームに自動的に配置されます。フィールドバスとSoftPLC タブのフィールドバス仮想ステーションマッピング構成メニューでオフセット位置を編集すると、後で順序を変更できます。
次の方法が使用されます。
フィールドバスマップは、プロセスデータフレームに割り当てられた順序で配置されます。
各マップは、フレームの最初からのオフセット値で開始します。
マップは、前のマップのすぐ上、または最初のマップのオフセット 0 の、最下位の場所に配置されます。
マップがプロセスデータフレームから削除されると、ギャップができます。新しいマップが仮想ステーションに割り当てられると、配置規則がそのギャップを埋めようとします。
マップが既存のマップの間に収まらない場合、配列内の次の空き位置が試行されます。
オフセット値は、設定ウィンドウで手動で変更できます。フィールドバスマップが重ならないように気を付けてください。
ToolsTalk 2が配置規則の違反を検出すると、エラーインジケーター がオフセットパラメータの横に表示されます。これは、マップが重なっているか、マップが境界の外にあることを示します。オフセット値を変更して修正できます。
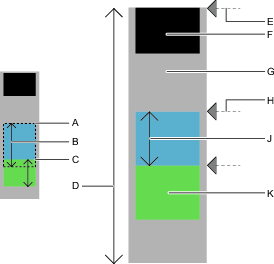
A | オフセット = 0 のプロセスデータフレームの最初のフィールドバスマップの開始位置 |
B | PDF の最初からのオフセットで表される、プロセスデータフレームのフィールドバスマップの開始位置 |
C | フィールドバスマップのサイズ |
D | フィールドバスマップ |
E | プロセスデータフレームのサイズ |
F | エラーの例: 青のマップが、「緑」のマップの開始位置に重なっている |
G | マップサイズ |
H | 「青」のマップの開始位置 |
J | プロセスデータフレーム |
K | オフセットアドレスが 0 の、プロセスデータフレームの最初のマップ |
フィールドバスマップでの項目の自動配置
項目はフィールドバスマップに自動的に配置されます。フィールドバスウィンドウを編集して、後で順序を変更できます。
次の方法が使用されます。
項目は、フィールドバスとSoftPLC
のフィールドバス仮想ステーションマッピング構成メニューにあるフィールドバスマップに追加された順番に配置されます。項目は、バイト、ビット、長さの位置に対して、最下位の場所に配置。
項目が既存の項目の間に収まらない場合は、配列内の次の空き位置に試行されます。
項目がフィールドバスマップから削除されると、ギャップができる。新しい項目が追加されると、配置アルゴリズムはその穴埋めを試行します。
ToolsTalk 2が配置規則の違反を検出した場合。エラーインジケーター
が表示され、エラーの場所を示す。エラーインジケータの上にマウスカーソルを合わせると、規則違反に関する詳細情報が表示されます。
フィールドバスマップの項目の編集または表示
プラント構造ウィンドウ
でコントローラを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
選択したマップの名前をダブルクリックします。
ワークスペースに構成メニューが表示されます。
フィールドバス構成メニューで送信先コントローラ タブまたは送信元コントローラ タブのいずれかを選択します。
フィールドバス構成メニューのマップ表で項目名をダブルクリックします。
項目の編集ダイアログボックスが開きます。
最下位ビットのある場所のバイト番号を入力して、項目の開始位置を編集します。
最下位ビットのある場所のビットを入力して、項目の開始位置を編集します。
項目の長さをビット数で編集します。
オプションのコンバーター値をドロップダウンメニューから編集します。
OK を選択して変更を確認し、ダイアログウィンドウを閉じます。
フィールドバス構成メニューがマップと表の両方で更新されます。
フィールドバスマップからの項目削除
プラント構造ウィンドウ
でコントローラを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、マップのリストを表示します。
選択したマップの名前をダブルクリックします。
ワークスペースに構成メニューが表示されます。
フィールドバス構成メニューで送信先コントローラ タブまたは送信元コントローラ タブを選択します。
マップから削除する各項目について、フィールドバス構成メニューの項目表の左端にあるチェックボックス
を選択します。削除を選択します。
フィールドバス構成メニューがマップと表の両方で更新されます。
フィールドバスマップのエクスポート
フィールドバスマップは、仮想ステーションとリモートの場所の間で使用される通信フレームに信号項目を配置する方法を定義します。このマップはテンプレートとしてエクスポートでき、別のコントローラにインポートし、再利用できます。
プラント構造ウィンドウ
でコントローラを選択します。メニューバーでフィールドバスと SoftPLC
タブを選択します。フィールドバスサブタブを選択して、ワークスペースとマップのリストを表示します。
フィールドバス ワークスペースの左端の列で、エクスポートするフィールドバスマップのチェックボックス
をオンにし、[管理]を選択し、ドロップダウンリストから[エクスポート]を選択します。目的の場所を参照し、保存を選択します。
マップは、JSON ファイル (*.json) として保存されます。エクスポートされるファイルは、別のコントローラにインポートできます。
非周期フィールドバス構成の使用
締め付け結果に含まれるデータの一部は、非周期データとして送信されます。IO信号 cycle_complete は、通常、非周期データをPLCプログラマーがフェッチする準備ができていることを示します。
以下のセクションでは、非周期データを構成する方法について説明します。
非周期データ構成の概要
非周期データ構成領域では、新しい非周期データ構成を追加することができます。一旦追加されると、異なる非周期データ構成がリストとして表示されます。
プラント構造
でコントローラを選択します。 [フィールドバスとSoftPLC] タブを選択します。
。非周期サブタブを選択します。
列には次の情報が含まれます。
列 | 説明 |
|---|---|
名前 | 仮想ステーションマッピングで選択可能な構成の名前です。 |
|
チャンネルの選択 | ボルトまたはチャンネル。この値は、各結果構成項目の識別子がボルトであるかチャンネルであるかを定義します。 |
データレイアウト | コンパクトまたは固定。 |
最終変更 | ToolsTalk 2時間で表されます。 |
最終変更者 | <ユーザー> によって最後に変更された構成データ。 |
コントローラ更新 | コントローラ時間で表します。 |
コントローラ更新者 | <ユーザー> によって更新されたコントローラ。 |
新規非周期データ構成の追加
プラント構造
でコントローラを選択します。 [フィールドバスとSoftPLC]タブ
に移動します。非周期サブタブを選択します。
[追加]を選択し、[新規非周期データ構成の作成]ウィンドウで[新規]を選択します。
非周期データ構成名を入力して、[追加]を選択します。
新しく作成された構成の[プロパティ]サブタブが開きます。
新しい非周期データ構成が可能な限り低い位置に追加され、リストが更新されます。
非周期データ構成メニュー
[非周期]タブで非周期データ構成をダブルクリックして、非周期データ構成メニューを開きます。
プロパティメニュー:
パラメーター名 | 説明 |
|---|---|
名前 | 仮想ステーションマッピングで選択可能な構成の名前です。 |
マップサイズ | この値は、仮想ステーションにマッピングされるまで手動で設定します。この値により、マッピングで選択したインスタンス内に構成が確実に収まるようになります。値は、データレコードサイズに応じて、必要なインスタンス数から計算されます。 |
最初のチャンネルまたはボルトオフセット | 最初のチャンネルまたはボルトオフセットのアドレス。これは、共通領域のサイズを定義します。 |
ボルトまたはチャンネル テンプレートのサイズ | ボルトまたはチャンネルのサイズ。 |
チャンネルの選択 | ボルトまたはチャンネル。この値は、各結果構成項目の識別子がボルトであるかチャンネルであるかを定義します。 |
データレイアウト | 次から選択します:
|
ヘッダーの追加 | チェックボックスを選択して、非周期構成結果にヘッダーを追加する必要があることを示します。チェックボックスがオンになっている場合、オフセットは使用状況に応じて6バイト低くまたは高く更新されます。これもグラフィック表示されます。ヘッダーは、使用可能なスペースがある場合にのみ追加できます。共通領域に項目が追加され、ヘッダー用のスペースがない場合、ヘッダーは無効になります。 コンパクトデータレイアウトを選択した場合、非同期データペイロードの長さを知るためにヘッダーを使用することを強くお勧めします。 |
存在しない値 | 構成が、締め付け結果またはマルチステージ構成に存在しないデータを必要とする場合、異なるデータ型の存在しない値が使用されます。 新しい非周期フィールドバスが作成されると、値はコントローラにより自動的に設定されます。 |
非同期データの構成
[非同期データの構成]領域には、最大サイズ、オフセット、およびテンプレートサイズによって設定された非同期構成を視覚化したものが表示されます。すべての構成はバイトレベルです。
項目が共通領域、ボルト領域、またはチャンネル領域に追加されると、左側に表示される非周期データフレームが変化します。
オフセットとテンプレートサイズの値がゼロの場合、共通、ボルト、またはチャンネルの領域はグレー表示され、編集できません。
共通領域のデータ
共通領域には、グローバルで、同じステーション内のすべてのスピンドルに適用可能なデータが含まれています。共通領域データは、ヘッダーの後、ボルト/チャンネルデータの前に表示されます。
ボルトまたはチャンネルデータ
ボルトまたはチャンネル領域のデータは、選択したボルトまたはチャンネルに対して一意であり、ボルトまたはチャンネル領域のデータのレイアウトは、選択したデータレイアウトによって異なります。
共通エリアの概要
最初の占有領域には、次の項目が含まれます。
複数の締め付け結果
バッチシーケンス結果
結果の通知
これらの項目は「共通」であり、ボルトまたはチャネルに固有のものではなく、次のパラメーターが含まれます。
パラメーター名 | 説明 |
|---|---|
タイプ | 各項目の値のタイプ。例:バッチシーケンスの結果値、結果の通知、または複数の締め付け結果値。 |
オフセット | 非周期データフレームを持つバイト配列内の項目の位置。バイト単位で定義されます。 |
サイズ | バイト単位でのサイズ。データ型が文字列の場合、これを手動で構成することができます。データ型が文字列でない場合、値はデータ型に基づいて自動的に設定されます。 |
データ型 | データ型の値。例:文字列、Int8、Int16 など。 |
名前 | 項目名。編集不可。 |
共通領域での非周期な結果構成の追加
共通エリアで追加を選択します。
[非周期結果の構成を作成]ウィンドウが開きます。
[複数の引き締め]、[結果の通知]、または[バッチシーケンス]ドロップダウンメニューからパラメーターを選択します。
出力データタイプを選択し、オフセット値を入力し、選択した出力データタイプが文字列の場合はサイズを入力します。
[追加] を選択し、[閉じる] を選択します。
共通領域での非周期な結果構成の削除
[共通] 領域で、削除する必要のある構成のチェックボックスを選択します。
削除を選択します。
ボルトまたはチャンネルエリアの概要
ボルトまたはチャネルの構成領域では、ボルトまたはチャネルに対して次のタイプの非周期データ項目を構成できます。
マルチステージ締め付け
プログラムモニター
プログラムの制限
ステップモニター
ステップ制限
パラメーター名 | 説明 |
|---|---|
タイプ | 各項目の値のタイプ。例:マルチステージの締め付け、プログラムモニター、プログラム制限、ステップモニターまたはステップ制限。 |
オフセット | 非周期データフレーム内の項目位置。バイト単位で定義されます。 |
サイズ | バイト単位でのサイズ。データ型が文字列の場合、これを手動で構成することができます。データ型が文字列でない場合、値はデータ型に基づいて自動的に設定されます。 |
データ型 | データ型の値。例:文字列、Int8、Int16 など。 |
名前 | 項目名。編集不可。 |
識別子 | 選択したボルトまたはチャンネルのIDを設定します。 |
ボルトまたはチャンネル領域での非周期な結果構成の追加
ボルトまたはチャンネル領域で追加を選択します。
[非周期結果の構成を作成]ウィンドウが開きます。
マルチステップの締め付け、プログラムモニター、プログラム制限、ステップモニター、またはステップ制限ドロップダウンメニューからパラメーターを選択します。
出力データタイプを選択し、オフセット値、識別子を入力し、選択した出力データタイプが文字列の場合はサイズを入力します。
ステップモニター と ステップ制限では、 ステップカテゴリ を選択し、 ソフトスタート、 ランダウン、 開始 、 最終のいずれかを選択します。
ステップ番号の代わりに、表示するステップカテゴリの結果を指定します。
同じステップカテゴリのステップが複数ある場合は、[ステップカテゴリの選択]ドロップダウンメニューで、 最後に実行されたステップまたはプログラムで最後のステップ(順序番号の大きいステップ)を表示するように選択できます。
[追加]、[閉じる]の順に選択します。
ボルトまたはチャンネル領域でコピーを作成する
ボルトまたはチャンネル領域の[コピーの作成]タブを使用して、一度に多数のボルトまたはチャンネルを追加することができます。
コピーする必要があるIDのチェックボックスを選択し、[コピーの作成]を選択します。
ボルトまたはチャンネルのコピーを作成ウィンドウが開きます。
[コピー数]フィールドにコピー数を入力します。
コピー用のスペースがない場合は、「コピー量は現在の構成内の残りのスペースに収まりません」という警告が表示されます。
[コピーを作成]を選択し、[閉じる]を選択します。
連続した識別子番号を持つコピーのリストが表示されるようになります。コピーされたIDの値は、常に既存の最大数に続く数となります。たとえば、IDの2、5、6がすでに存在し、値が2のIDがコピーされた場合、新しいIDの値は7となります。値の変更にはパラメータをダブルクリックします。
bnボルトまたはチャネル領域からの非周期的な結果設定の削除
IDのチェックボックスをオンにして、そのIDの下のすべての構成を削除します。または、構成を個別に削除するには、ボルトまたはチャネル領域でその構成の横にあるチェックボックスをオンにします。
削除を選択します。
締め付け結果の例
このフィールドバスマップでは、締め付け結果データはレコード番号2048から始まり、各レコードは64バイトです。ヘッダーを含む締め付けデータの最大サイズは、最大64チャンネルに適合するために646バイトとなります。
データ | データ型 | フレーム内の位置 | バイト | |
|---|---|---|---|---|
a データ部分の長さ、およびヘッダーからのシーケンスと長さ。つまりデータの長さ + 4バイト | ||||
ステータス | 整数 | ヘッダー | 0-1 | |
シーケンス | 整数 | ヘッダー | 2-3 | |
データ長a | 整数 | ヘッダー | 4-5 | |
ボルト番号チャンネル 1 | 整数 | データ | 6-7 | |
最終トルクチャンネル 1 | 実測 | データ | 8-11 | |
最終角度チャンネル 1 | 実測 | データ | 12-15 | |
ボルト番号チャンネル 2 | 整数 | データ | 16-17 | |
最終トルクチャンネル 2 | 実測 | データ | 18-21 | |
最終角度チャンネル 2 ....................................... | 実測 | データ | 22-25 | |
ボルト番号チャンネル 64 | 整数 | データ | 636-637 | |
最終トルクチャンネル 64 | 実測 | データ | 638-641 | |
最終角度チャンネル 64 | 実測 | データ | 642-654 | |
ヘッダーフィールドの機能
信号 | データ型 | 説明 |
|---|---|---|
ステータス | 整数 | 将来の使用のために追加されました。現時点では常に0x8100です。 |
シーケンス | 整数 | 常に-1になります |
データ長 | 整数 | データの長さ、およびヘッダーからのシーケンスと長さ。つまりデータの長さ + 4バイト |
データフィールドの機能
信号 | データ型 | 説明 |
|---|---|---|
ボルト番号チャンネル X | 整数 | 締め付けに使用される同期モードの構成に応じたチャンネルのボルト番号。締め付けに含まれていないチャンネルの場合、ボルト番号は0に設定されます |
最終トルクチャンネル X | 実測 | チャンネルの締め付け結果から得られた最終トルク値。値は常にNmで単位で送信されます。締め付けに含まれていない、または最終トルク値を生成しなかったチャンネルの場合、0x7F820000に設定されます。 |
最終角度チャンネル X | 実測 | チャンネルの締め付け結果から得られた最終角度値。値は、常に単位 deg で送信されます。締め付けに含まれていない、または最終トルク値を生成しなかったチャンネルの場合、0x7F820000に設定されます。 |
最終トルクと最終角度の値は、ISO/IEC/IEEE60559:2011 に従って浮動小数点のバイナリ32で送信されます。データはネットワーク順に送信されます(ビッグエンディアン)。値を送信できない場合、特別な値 0x7F820000 が送信されます。浮動小数点数として解釈される場合、NaN(非数)に対応します。
整数値は符号付き16ビット整数として送信されます。つまり、有効な範囲は -32768 から 32767 です。
たとえば、チャンネル1とチャンネル3で締め付けが行われ、次の締め付けデータが作成された場合:
チャンネル 1
ボルト番号 1
最終トルク 10.23 Nm
最終角度 341.4°
チャンネル 3
ボルト番号 5
最終トルク 10.32 Nm
最終角度は生成されませんでした
締め付けデータは、インスタンス番号 2048 で次のように送信されます:
バイト | フィールド | 値 | コメント |
|---|---|---|---|
0-1 | ステータス | 0X8100 | 常に 0X8100 になります |
2-3 | シーケンス | -1 | 常に-1になります |
4-5 | 長さ | 34 | 34バイト、3つのチャンネルのデータ + 長さおよびシーケンス番号 |
6-7 | ボルト番号チャンネル 1 | 1 | |
8 - 11 | 最終トルクチャンネル 1 | 10.23 | 10.23 Nm |
12-15 | 最終角度チャンネル 1 | 341.4 | 341.4° |
16-17 | ボルト番号チャンネル 2 | 0 | 締め付けには含まれません |
18-21 | 最終トルクチャンネル 2 | 0x7F820000 | 利用可能なトルク値がありません |
22-25 | 最終角度チャンネル 2 | 0x7F820000 | 利用可能な角度値がありません |
26-27 | ボルト番号チャンネル 3 | 5 | |
28-31 | 最終トルクチャンネル 3 | 10.32 | 10.32Nm |
32-35 | 最終角度チャンネル 3 | 0x7F820000 | 利用可能な角度値がありません |
SoftPLC構成タブ
SoftPLCの概要
SoftPLC は、PF6/PFFlex の動作をカスタマイズしたり、フィールドバスデータを送受信したり、外部 SoftPLC との間で I/O 信号を交換したりするために使用されます。外部 SoftPLCは、組立ライン上の機械の制御に使用されます。構成とプログラミングは、ToolsTalk 2と統合されたMultiProg と呼ばれるサードパーティのソフトウェアを介して行われますが、独自のプロセスで実行されます。SoftPLCはフィールドバスとSoftPLC タブ にあり、ライセンスまたは機能ごとに、この機能をサポートしているコントローラに表示されます。
低反力締め付け戦略や全コントローラーにわたる機能などのコントローラ機能は、機能管理システム(FMS)を介して配布されるライセンスを必要とします。特定のライセンスなしで機能の構成は可能であるのに対して、これらの機能の割り当てと使用には、コントローラに正しいライセンスがインストールされている必要があります。ライセンスの詳細については、ライセンス(FMS)を参照してください。
SoftPLC 信号構成の作成
アクセサリーと SoftPLC 間の操作は、I/O 信号を交換して行われます。
[SoftPLC 信号構成] フィールドで [追加] を選択すると、コントローラに接続されているサポートされているすべての I/O 信号がこのリストが表示されます。
関係ない信号をクリアして、SoftPLC 信号構成から除外します (デフォルトすべての信号が選択されています)。
信号構成リストに名前を付けます。
信号構成を仮想ステーションにマッピングする際、作成された信号構成が、ドロップダウンリストでの選択オプションとして使用可能になります。
信号構成に含まれていない(チェックマークがオンになっていない)信号は、引き続きSoftPLCコンフィギュレーターMultiprogに表示されますが、取り消し線が引かれています。
SoftPLC仮想ステーションマッピング構成
新規SoftPLCマッピングの作成
SoftPLC 仮想ステーションマッピング構成 で 追加 を選択します。
新規 SoftPLC マッピングの作成 ウィンドウで、ドロップダウンメニューから必要な 仮想ステーション と SoftPLC 信号構成 を選択します。
同じ SoftPLC 信号構成を複数の仮想ステーションに使用できます。
各仮想ステーションは、1つのSoftPLC 信号構成を使用できます。仮想ステーションが特定の信号構成でマッビングされると、新規SoftPLCマッピングを作成するときに、ドロップダウンメニューで仮想ステーションを使用できなくなります。使用可能にするには、その仮想ステーションの既存のマッピングを削除します。
SoftPLCインデックス:コントローラ上の特定の仮想ステーションを SoftPLC 環境の順序付きインデックスに接続します。たとえば、SoftPLCが仮想ステーション2を参照している場合、このマッピングはSoftPLCに現在どの仮想ステーションが現在番号2であるかを正確に通知します。
プロジェクトの仮想ステーションで更新を選択すると、SoftPLC プロジェクトの SoftPLC 信号構成または SoftPLC マッピングへに行われた変更が確認できます。ToolsTalk 2は、更新時にMultiprog SoftPLCプロジェクトの変数を削除しません。追加または変更のみが可能です。そのため、更新する前に MultiProg の仮想ステーションまたはフィールドバスのグローバル変数をクリアすることが推奨されます。
SoftPLC マッピングの削除
対応するチェックボックスをオンにして、仮想ステーション信号構成マッピングを選択します。削除を選択します。
新規SoftPLCプロジェクトの作成
新しいSoftPLC信号構成を作成します。
SoftPLC信号構成を仮想ステーションに割り当てます。
一般SoftPLC設定でSoftPLC ONを選択します。
[新規作成] を選択すると、新しい SoftPLC プロジェクトに対して自動的に Multiprog が開きます。
このプロジェクトは、基本的なテンプレートを使用し、このテンプレートには Multiprogで利用可能なすべての機能が含まれています。
作成され、編集されたプロジェクトは、プロジェクトが構築され、文書 > Mp Temp に保存されるとローカルディスクに継続的に保存されます。ToolsTalk 2 SoftPLC の起動時に開くを選択すると、SoftPLC プロジェクトが ToolsTalk 2 サーバーに保存されていない場合は、この保存されたデータプロジェクトがアップロードされます。
Multiprog で SoftPLC プログラムを編集し、ToolsTalk 2 でプロジェクトに名前と説明を指定します。
プロジェクトの仮想ステーションフィールドで更新を選択して、仮想ステーションマッピングに I/O 信号構成を追加します。
フィールドバスの SoftPLC フレームサイズフィールドで [更新] を選択して、フィールドバスデータを追加します。
フィールドバスのフレームサイズは、SoftPLC とフィールドバスデータを直接送受信できるようにする特殊な SoftPLC 入出力部分を含むように構成する必要があります。
[保存]を選択して、編集したプロジェクトをToolsTalk 2サーバーにチェックインします。
変更をコントローラにプッシュします。
SoftPLC プロジェクトの削除
プロジェクトの削除
プロジェクト領域で 削除を選択します。ダイアログウィンドウで[削除]を再度選択して確定します。
SoftPLCユーザーデータの作成
統合は、SoftPLC と OpenProtocol アダプタの間で共有メモリをマッピングし、最大で 6 つの仮想ステーションがサポートされるように実装されます。仮想ステーションには、SoftPLC へのデータに 100 バイト、SoftPLC からのデータに 100 バイトが割り当てられます。合計で 600 バイトが両方向にマッピングされます。
SoftPLC は、共有メモリの専用の部分を介してプロトコルアダプターと交信できます。
一般SoftPLC設定フィールドで追加を選択します。
SoftPLC ユーザーデータの作成 ウィンドウのドロップダウンから関連するプロトコルを選択します。
To SoftPLCおよびFrom SoftPLCアドレスフィールドの開始アドレスに0を、 終了アドレスに599を入力します。
追加を選択します。
MultiprogソフトウェアのGlobal_Variables *セクションには、次のアドレスを持つ各仮想ステーションの出力変数(opOUT_VSX)と入力変数(opIN_VSX)が含まれます。
仮想ステーション
SoftPLCへのオープンプロトコルユーザーデータ
SoftPLCからのオープンプロトコルユーザーデータ
仮想ステーション 1
%MB3.38400
%MB3.40448
仮想ステーション 2
%MB3.38500
%MB3.40548
仮想ステーション 3
%MB3.38600
%MB3.40648
仮想ステーション 4
%MB3.38700
%MB3.40748
仮想ステーション 5
%MB3.38800
%MB3.40848
仮想ステーション 6
%MB3.38900
%MB3.40948
上記のアドレスが設定されていないプロジェクトをインポートまたは更新する場合は、手動でMultiprogに追加する必要があります。
SoftPLCの オンまたはオフを選択します。
オン: SoftPLCプロセスが失われた場合、工具は締め付けを行わないようにロックされます。
オフ: SoftPLCプロセスが失われても、工具は引き締めを実行できます。
コントローラでオープンプロトコル操作を実行します。
変更をコントローラにプッシュします。
SoftPLC通信のセットアップ
オープンプロトコルクライアントにて、MID0241でユーザーデータを登録します。
コントローラは、MID0005をオープンプロトコルクライアントに送信することで、コマンドを受け入れます。
オープンプロトコルクライアントはMID0240を使用して、コントローラからユーザーデータをダウンロードします。
コントローラは、MID0005をオープンプロトコルクライアントに送信することで、コマンドを受け入れます。
コントローラはMID0242を使用して、データをオープンプロトコル クライアントに送信します。
オープンプロトコルクライアントは、MID0243でユーザーデータを受信したことを確認します。
詳細情報については、ドキュメント「OpenProtocol Appendix for PowerFocus 6000 SW1.5.docx」を参照してください。
SoftPLC プロジェクトテンプレートのインポート
新しい SoftPLC プロジェクトは既存のプロジェクトテンプレートから作成できます。テンプレートは、さらに調整が可能な基本的な提示として使用できます。選択したプロジェクトテンプレートは、元のプロジェクトを上書きしないように、コピーされます。
プロジェクトのインポートを選択して、既存の SoftPLC プロジェクトを選択します。
Multiprogで SoftPLC プロジェクトを編集します。
プロジェクトの仮想ステーションで更新を選択して、仮想ステーションマッピングに I/O 信号構成を追加します。
フィールドバスの SoftPLC フレームサイズで [更新] を選択して、フィールドバスデータを追加します。
[保存]を選択して、編集したプロジェクトをToolsTalk 2サーバーにチェックインします。
変更をコントローラにプッシュします。
プロジェクト内にまだ含まれていない場合、[プロジェクトの仮想ステーション] で [更新] を選択すると、SoftPLC 仮想ステーションのマッピングが SoftPLC プロジェクトに追加または更新されます。
[ライブラリ]タブでの作業
ライブラリタブ は、グローバル機能と共に左側のメニューバーにあり、次の機能を提供します。
ライブラリ | 機能 |
|---|---|
 | 締め付けプログラムのライブラリ ライブラリには、登録するコントローラに使用可能なすべてのグローバル締め付けプログラムが含まれます。グローバル締め付けプログラムは、あるコントローラからコピーするか、ライブラリで作成し、編集して 1 つ以上のコントローラに配信することができます。 |
 | 構成ライブラリ このライブラリには、登録するコントローラに使用可能なすべてのグローバル構成が含まれます。構成は、あるコントローラからコピーするか、ライブラリで作成し、編集して 1 つ以上のコントローラに配信することができます。 |
 | フィールドバス構成ライブラリ このライブラリには、登録するコントローラに使用可能なすべてのグローバルフィールドバス構成が含まれます。フィールドバス構成は、あるコントローラからコピーするか、ライブラリで作成し、編集して 1 つ以上のコントローラに配信することができます。 |
| 設定ライブラリ 他のコントローラに配布できるイベント構成用のライブラリー。イベントは、ここまたは 設定 |
| プログラムテンプレートライブラリ マルチステップ締め付けプログラムのテンプレートを作成します。新しいマルチステッププログラムを作成する際、テンプレートは挿入 (ドラッグアンドドロップ) でき、マルチステッププログラムを構築する基盤となります。 |
 | コントローラ構成ライブラリ コントローラ構成ライブラリは、コントローラ構成を作成および変更し、それを複数のコントローラに配信するのに使用できるコントローラテンプレートを含みます。ライブラリは、ToolsTalk 2 サーバーにアクセスすることなくステーションセットアップモードで構成をコピーし、展開するのにも非常に便利です。 |
ライブラリ - 配信リスト
配信リストは、登録リストと同様に機能します。グローバル構成のいずれかに変更を行う度に、変更はすべての登録先に反映されます。配信リストは登録を管理します。
左側のメニューバーでライブラリ
を選択します。 分布を表示するには、次のいずれかを選択します。
グローバル締め付けプログラム
。グローバル構成ライブラリ
 。
。グローバルフィールドバスライブラリ
 。
。グローバル設定ライブラリ
 。
。
選択したライブラリで 1 つ以上のチェックボックスを選択して、配信リストの内容を表示します。
配信リストは、現在選択している構成に登録しているすべてのコントローラを示します。
締め付けプログラムのライブラリ
締め付けプログラムのライブラリのはじめに
締め付け戦略の選択とパラメータ値の組み合わせで締め付けプログラムが形成され、これが締め付けプログラムの名前となります。締め付けプログラムはローカルかグローバルのどちらかになります。
ローカル締め付けプログラムは単一のコントローラに有効で、グローバル締め付けプログラムでは同じ締め付けプログラムに複数のコントローラが登録できます。
コントローラはグローバル締め付けプログラムに登録できます。プログラムが変更されると、変更は、プログラムに登録している ToolsTalk 2 のすべてのコントローラに反映されます。
締め付けプログラムライブラリは、グローバル締め付けプログラムと特定の締め付けプログラムに登録しているコントローラを管理します。
登録の更新は、ToolsTalk 2 アプリケーション内で行われます。影響するすべてのコントローラには、ライン構造ワークスペースにプッシュインジケーター が表示されます。
ToolsTalk 2 は、ローカル締め付けプログラムとグローバル締め付けプログラムを区別できますが、コントローラ自体は認識していません。したがって、コントローラGUIかウェブGUIのどちらかから締付けプログラムを変える場合、ToolsTalk 2でアクションを指定することが重要です。
締め付けプログラムのライブラリワークスペース
左側のメニューバーでライブラリ
を選択します。 締め付けプログラムライブラリ
に移動します。ワークスペースエリアが、グローバル締め付けプログラムのリストを表示します。
列 | 説明 |
|---|---|
チェックボックス | 構成を選択します。 |
名前 | 構成の名前を示します。プッシュインジケーター |
戦略 | 構成に選択されている締め付け戦略。 |
グローバル | 列にはいが表示される場合は、これがグローバル締め付けプログラムであることを示します。 |
ターゲット | 最終目標は、トルク値または角度値で表されます。 |
最終変更 | 最後の変更が行われたとき, ToolsTalk 2時間で表現されます。 |
変更者 | 最後に変更を加えたユーザーを示します。 |
バージョン | グローバル締め付けプログラムライブラリをサポートできるコントローラソフトウェアのバージョン。 |
| 実際の列ではありません。 構成のリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
コントローラータイプ | 締め付けプログラムのコントローラタイプを示します。 |

コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
1 つ以上のグローバル締め付けプログラムチェックボックスを選択して配信リストを表示します。配信リストは、選択したプログラムに現在登録しているすべてのコントローラを示します。
グローバル締め付けプログラムがない場合は、ワークスペースエリアは空白です。追加を選択して新しい締め付けプログラムを作成するか、既存のプログラムをダブルクリックしてパラメータを表示または編集します。
締め付けプログラムライブラリ - グローバル締め付けプログラムの追加
左側のメニューバーでライブラリ
を選択します。 締め付けプログラム
に移動します。ワークスペースエリアが、グローバル締め付けプログラムのリストを表示します。
追加を選択します。新しい締め付けプログラムを作成ダイアログ ウィンドウが開きます。
以下の表に記載のパラメータを入力します。
ダイアログウィンドウで追加を選択します。ウィンドウが閉じられ、ワークスペースに締め付けプログラムのメニューが表示されます。
パラメータ | 説明 |
|---|---|
コントローラータイプ | ショートカットメニューからコントローラのタイプを選択します。 |
コントローラのソフトウェア バージョン | ショートカットメニューからコントローラソフトウェアのバージョンを選択します。 |
名前 | パラメータ入力フィールドで、グローバル締め付けプログラムに名前を指定します。 |
戦略 | ショートカットメニューから締め付け戦略を選択します。 |
ターゲット | ショートカットメニューから目標タイプを選択します。 |
目標値 | パラメータ入力フィールドの最終ステップの目標値を数値で入力します。 |
締め付けプログラムライブラリ - グローバル締め付けプログラムの削除
左側のメニューバーでライブラリ
を選択します。 締め付けプログラム
に移動します。ワークスペースエリアが、グローバル締め付けプログラムのリストを表示します。
削除する各締め付けプログラムの、左端の列のチェックボックス
を選択します。管理を選択し、続いて削除を選択します。
グローバル締め付けプログラムが、ライブラリから削除され、リストが更新されます。
削除したプログラムに登録しているコントローラは、プログラムを失いません。削除された締め付けプログラムは、締め付けプログラムライブラリワークスペースのリストから削除されます。締め付けプログラムは、グローバル締め付けプログラムに登録されているコントローラの締め付けワークスペースのリストには残ります。目に見える変化は、締め付けプログラムがグローバル締め付けプログラムからローカル締め付けプログラムに変換されることです。(ライブラリリンク列の入力はクリアされます)。
締め付けプログラムライブラリ - グローバル締め付けプログラムの配信
締め付けプログラムライブラリ - 配信リスト
グローバル締め付けプログラムの配信リストは、登録リストと同様です。グローバル締め付けプログラムに変更を行うと、変更はすべての登録先に反映されます。配信リストは登録を管理します。
左側のメニューバーでライブラリ
を選択します。 締め付けプログラム
に移動します。ワークスペースエリアが、グローバル締め付けプログラムのリストを表示します。
グローバル締め付けプログラムライブラリで 1 つ以上のチェックボックスを選択して、配信リストの内容を表示します。
配信リストは、現在選択している締め付けプログラムに登録しているすべてのコントローラを示します。
締め付けプログラムライブラリ - グローバルプログラムの配信リストへの追加
左側のメニューバーでライブラリ
を選択します。 締め付けプログラム
に移動します。ワークスペースエリアが、グローバル締め付けプログラムのリストを表示します。
チェックボックス
を使用して、配信リストに追加するプログラムを選択します。管理を選択し、続いて配信を選択します。
グローバル構成の配信ダイアログウィンドウが開きます。
左側の列に選択したグローバル締め付けプログラムが示されます。
右側の列は選択したプログラムに対応し、配信リストに追加できるコントローラのリストを示します。
同じタイプかつ同じソフトウェアバージョンのコントローラ間でのみ配布できます。
チェックボックス
を使用して、右側の列でコントローラを選択します。コントローラが選択したグローバル締め付けプログラムにすでに登録している場合、右側の列には表示されません。
オプションのステップ: 下向きの矢印
 を選択して追加の構成を開きます。
を選択して追加の構成を開きます。オプションのステップ: グローバル締め付けプログラムがコントローラの GUI または Web GUI で変更される場合にToolsTalk 2で行われる操作を選択します。
追加を選択します。
ダイアログウィンドウが閉じます。
ToolsTalk 2 は、ローカル締め付けプログラムとグローバル締め付けプログラムを区別できますが、コントローラ自体は認識していません。したがって、コントローラGUIかウェブGUIのどちらかから締付けプログラムを変える場合、ToolsTalk 2でアクションを指定することが重要です。この操作は、締め付けプログラムライブラリのグローバル締め付けプログラムの配信で定義されています。
締め付けプログラムライブラリ - グローバルプログラム登録の配信リストからの削除
グローバル締め付けプログラムの配信リストは、登録リストと同様です。グローバル締め付けプログラムに変更を行うと、変更はすべての登録先に反映されます。配信リストは登録を管理します。
グローバル締め付けプログラムのチェックボックスを 1 つ選択して、配信リストの内容を表示します。配信リストは、選択したプログラムに登録しているすべてのコントローラを示します。
プラント構造ワークスペース
でコントローラを選択します。締め付けプログラム
に移動します。締め付けプログラムのワークスペースに、締め付けプログラムのリストが表示されます。
選択された締め付けプログラムには、ライブラリのリンク列のエントリにはいが示されます。
選択した締め付けプログラムのチェックボックス
を選択します。リンク解除を選択します。
選択された締め付けプログラムのライブラリのリンク列のエントリがクリアされます。
左側のメニューバーでライブラリ
を選択します。 締め付けプログラムライブラリ
に移動します。削除された締め付けプログラムのチェックボックス
を選択します。配信リストが更新され、コントローラ名がリストから削除されます。
締め付けプログラムライブラリ - グローバル締め付けプログラムの更新
左側のメニューバーでライブラリ
を選択します。 締め付けプログラム
に移動します。ワークスペースエリアが、グローバル締め付けプログラムのリストを表示します。
名前フィールドをダブルクリックして、締め付けメニューを編集可能にします。変更は締め付けプログラムに自動的に保存されます。
グローバル締め付けプログラムは、締め付けメニューがライブラリパスを介して開く場合にのみ、編集または更新できます。
登録の更新は、ToolsTalk 2 アプリケーション内で行われます。影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター が表示されます。
締め付けプログラムライブラリ - ローカル締め付けプログラムからグローバルプログラムへの変換
1 つのコントローラで開発されているローカル締め付けプログラムをグローバル締め付けプログラムに変換できます。この締め付けプログラムは、選択したコントローラに配信できます。
プラント構造
からコントローラを選択し、締め付けプログラムを選択します。締め付けプログラムライブラリに追加するプログラムのチェックボックスをオンにします。
ドロップダウンリストから 管理、続いてライブラリに追加を選択します。グローバル構成の作成ダイアログウィンドウが開きます。
作成を選択します。締付けプログラムライブラリのリストにプログラムが追加されます
。
ToolsTalk 2 は、ローカル締め付けプログラムとグローバル締め付けプログラムを区別できますが、コントローラ自体は認識していません。したがって、コントローラGUIかウェブGUIのどちらかから締付けプログラムを変える場合、ToolsTalk 2でアクションを指定することが重要です。
グローバル構成ライブラリ
構成ライブラリのはじめに
構成はローカルかグローバルのどちらかになります。
ローカル構成は、単一のコントローラに有効で、グローバル構成は複数の選択されたコントローラに有効です。
コントローラはグローバル構成に登録できます。構成が変更されると、変更は、構成に登録している ToolsTalk 2 のすべてのコントローラに反映されます。
グローバル構成ライブラリは、グローバル構成と構成に登録しているコントローラを管理します。
ToolsTalk 2 ではローカルとグローバルの構成を区別できます。コントローラ自体は、ローカルとグローバルの構成を区別しません。そのため、デバイスの構成がコントローラ GUI または Web GUI のいずれかから変更される場合は、ToolsTalk 2 で操作を指定することが重要です。
グローバル構成ワークスペース
左側のメニューバーでライブラリ
を選択します。 構成ライブラリ
に移動します。ワークスペースエリアに、グローバル構成のリストが表示されます。
列 | 説明 |
|---|---|
チェックボックス | 構成を選択します。 |
名前 | 構成の名前を示します。プッシュインジケーター |
タイプ | 構成タイプ |
最終変更 | 最後の変更が行われたとき, ToolsTalk 2時間で表現されます。 |
変更者 | 最後に変更を加えたユーザーを示します。 |
バージョン | グローバル構成をサポートしているコントローラソフトウェアのバージョン。 |
| 実際の列ではありません。 構成のリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
コントローラータイプ | 構成の対象コントローラタイプを示します。 |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
1 つ以上のグローバル構成チェックボックスを選択して配信リストを表示します。配信リストは、選択した構成に現在登録しているすべてのコントローラを示します。
グローバル構成がない場合は、ワークスペースエリアは空です。追加を選択して新しい構成を作成するか、既存の構成をダブルクリックしてパラメータを表示または編集します。
グローバル構成ライブラリ - グローバル構成の作成またはインポート
グローバル構成の作成:
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーの構成ライブラリ
に移動します。ワークスペースに、グローバル構成のリストが表示されます。
追加を選択します。
新しい構成の作成ダイアログ ウィンドウが表示されます。
次のパラメータを入力します。
適用する構成について、追加する構成のタイプ、コントローラタイプ、コントローラのソフトウェアバージョンを選択します。
ショートカットウィンドウで追加を選択します。
選択した構成タイプの構成ウィンドウが表示されます。
構成は、構成ライブラリに自動的に保存されます。
既存のグローバル構成のインポート:
左側のメニューバーでライブラリ
を選択します。 構成ライブラリ
に移動します。ワークスペースに、構成のリストが表示されます。
リストに新しい構成を追加するには、追加を選択します。
新しい構成の作成ポップアップウィンドウが表示されます。
インポートタブを選択します。
ファイルを開くを選択します。
インポートファイルを読み取るための参照ウィンドウが開きます。
必要なインポートファイルを選択します。ファイルは <controller_name>.json の形式である必要があります。開くを選択します。
ショートカットウィンドウで追加を選択します。
インポートした構成の構成ウィンドウが表示されます。
構成は、構成ライブラリに自動的に保存されます。
グローバル構成ライブラリ - グローバル構成の削除
左側のメニューバーでライブラリ
を選択します。 構成ライブラリ
に移動します。ワークスペースに、グローバル構成のリストが表示されます。
削除する各構成に、左端の列のチェックボックス
を選択します。管理を選択し、続いて削除を選択します。
グローバル構成が、ライブラリから削除され、リストが更新されます。
削除した構成に登録しているコントローラは、構成を失いません。削除されたグローバル構成は、構成ライブラリワークスペースのリストから削除されます。構成は、グローバル構成に登録している構成の構成ワークスペースのリストにはまだあります。目に見える変化は、構成がグローバル構成からローカル構成に変換されることです。(ライブラリリンク列の入力はクリアされます)。
グローバル構成ライブラリ - 既存の構成からのグローバル構成の作成
プラント構造
で対象の構成を含むコントローラを選択します。メニューバーで構成
に移動します。1 つ以上の構成を選択して、ライブラリに追加し、管理をクリックして、ライブラリに追加を選択します。
選択したローカル構成がグローバル構成になり、グローバル構成ライブラリに保存されます。
ローカルの変更がコントローラまたは Web インターフェースに行われる場合、2 つのオプションがあります。
自動で元に戻す: コントローラへの変更は、グローバル構成には適用されず、グローバル構成が適用を続けます。
リンク解除: コントローラへの変更がコントローラの構成に適用され、グローバル構成へのリンクが切断されます。その結果、グローバル構成はコントローラへの配信リストから即座に削除されます。
[ライブラリ]
を選択します。 上部のメニューバーでグローバル構成
を選択します。ワークスペースには、グローバル構成のリストが表示され、新しく追加された構成がリストに表示されるようになります。
グローバル構成ライブラリ - グローバル構成の配信
左側のメニューバーでライブラリ
を選択します。 構成ライブラリ
に移動します。ワークスペースに、グローバル構成のリストが表示されます。
構成チェックボックス
を選択します。管理を選択し、続いて配信を選択します。同じタイプかつ同じソフトウェアバージョンのコントローラ間でのみ配布できます。
チェックボックス
で、配信に含める各構成を選択します。ダイアログウィンドウの右側で 1 つ以上のコントローラを選択します。ダイアログウィンドウで追加を選択します。
グローバル構成への更新によって、配信されたコピーが更新されます。グローバル構成の変更は選択されたコントローラに適用されます。
ローカルの変更がコントローラまたは Web GUI に行われる場合、2 つのオプションがあります。
自動で元に戻す: コントローラへの変更は、構成には適用されず、グローバル構成がまだ有効です。
リンク解除: コントローラへの変更が構成に適用され、グローバル構成へのリンクが切断されます。その結果、グローバル構成はコントローラへの配信リストから即座に削除されます。
変更は、グローバル構成ライブラリに自動的に保存されます。
影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター が表示されます。
グローバル構成ライブラリ - グローバル構成の編集
左側のメニューバーでライブラリ
を選択します。 グローバルライブラリ
を選択します。ワークスペースに、グローバル構成のリストが表示されます。
編集する構成をダブルクリックします。選択した構成タイプの構成ウィンドウが表示されます。
変更は、グローバル構成ライブラリに自動的に保存されます。
影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター が表示されます。
グローバル構成ライブラリ - 配信リストからグローバル構成サブスクリプションを削除
グローバル構成の配信リストは、登録リストと同様です。グローバル構成に変更を行うと、変更はすべての登録先に反映されます。配信リストは登録を管理します。
グローバル構成のチェックボックスを 1 つ選択して、配信リストの内容を表示します。配信リストは、選択した構成に登録しているすべてのコントローラを示します。
1 つのコントローラからグローバル構成の登録を削除するには:
プラント構造ワークスペース
でコントローラを選択します。構成
に移動します。構成ワークスペースに、締め付けプログラムのリストが表示されます。
配信された構成には、ライブラリのリンク列のエントリにはいが示されます。
選択した締め付けプログラムのチェックボックス
を選択します。管理を選択した後、リンク解除をドロップダウンメニューを選択します。
選択された構成のライブラリのリンク列のエントリがクリアされます。
左側のメニューバーでライブラリ
を選択します。 構成ライブラリ
に移動します。削除された構成のチェックボックス
を選択します。配信リストが更新され、コントローラ名がリストから削除されます。
フィールドバス構成ライブラリ
フィールドバス構成はローカルかグローバルのどちらかになります。
ローカルフィールドバス構成は、単一のコントローラに有効で、グローバルフィールドバス構成は複数の選択されたコントローラに有効です。
コントローラはグローバルフィールドバス構成に登録できます。構成が変更されると、変更は、構成に登録している ToolsTalk 2 のすべてのコントローラに反映されます。
グローバルフィールドバス構成ライブラリは、グローバルフィールドバス構成と構成に登録しているコントローラを管理します。
登録の更新は、ToolsTalk 2 アプリケーション内で行われます。影響するすべてのコントローラには、ライン構造ワークスペースにプッシュインジケーター が表示されます。
ToolsTalk 2 は、ローカルとグローバルのフィールドバス構成を区別できますが、コントローラ自体はこれを認識していません。したがって、コントローラGUIかウェブGUIのどちらかからフィールドバス構成を変える場合、ToolsTalk 2でアクションを指定することが重要です。
フィールドバス構成ワークスペース
左側のメニューバーでライブラリ
を選択します。 フィールドバスライブラリ
に移動します。ワークスペースエリアに、グローバルフィールドバス構成のリストが表示されます。
列 | 説明 |
|---|---|
チェックボックス | フィールドバス構成を選択します。 |
名前 | フィールドバス構成の名前を示します。プッシュインジケーター |
コントローラへのサイズ | データフレームの受信サイズが表示されます。 |
コントローラからのサイズ | データフレームの送信サイズが表示されます。 |
最終変更 | 最後の変更が行われたとき, ToolsTalk 2時間で表現されます。 |
変更者 | 最後に変更を加えたユーザーを示します。 |
バージョン | グローバルフィールドバス構成をサポートしているコントローラソフトウェアのバージョン。 |
| 実際の列ではありません。 構成のリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
コントローラータイプ | フィールドバス構成の対象コントローラタイプを示します。 |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
1 つ以上のグローバルフィールドバス構成チェックボックスを選択して配信リストを表示します。配信リストは、選択したフィールドバス構成に現在登録しているすべてのコントローラを示します。
グローバルフィールドバス構成がない場合は、ワークスペースエリアは空です。追加をクリックして新しいフィールドバス構成を作成するか、既存の構成をダブルクリックしてパラメータを表示または編集します。
フィールドバス構成ライブラリ - グローバルフィールドバス構成の作成またはインポート
フィールドバス構成を作成するには:
左側のメニューバーでライブラリ
を選択します。 フィールドバスライブラリ
に移動します。ワークスペースに、フィールドバス構成のリストが表示されます。
リストに新しいフィールドバス構成を追加するには、追加を選択します。
新しいフィールドバス構成の作成 ダイアログボックスが表示されます。
次のパラメータを入力して、新しいフィールドバスマップを追加します。
名前を入力します。
コントローラへのサイズとコントローラからのサイズを入力します。
ショートカットメニューから、デバイスのコントローラタイプとコントローラソフトウェアバージョンを選択します。
ショートカットウィンドウで追加を選択します。
追加したフィールドバス構成の構成ウィンドウが表示されます。
フィールドバス構成は、フィールドバスライブラリに自動的に保存されます。
既存のフィールドバス構成をインポートするには:
左側のメニューバーでライブラリ
を選択します。 フィールドバスライブラリ
に移動します。ワークスペースに、フィールドバス構成のリストが表示されます。
リストに新しい構成を追加するには、追加を選択します。
新しいフィールドバス構成の作成 ダイアログボックスが表示されます。
インポートタブを選択します。
ファイルを開くを選択します。
インポートファイルを読み取るための参照ウィンドウが開きます。
必要なインポートファイルを選択します。ファイルは <fieldbus_configuration_name>.json の形式である必要があります。開くを選択します。
ショートカットウィンドウで追加を選択します。
追加したフィールドバス構成の構成ウィンドウが表示されます。
フィールドバス構成は、フィールドバスライブラリに自動的に保存されます。
フィールドバス構成ライブラリ - グローバルフィールドバス構成の削除
左側のメニューバーでライブラリ
を選択します。 フィールドバス構成ライブラリ
に移動します。ワークスペースは、グローバルフィールドバス構成のリストを表示します。
フィールドバス構成を削除するには、左端の列のチェックボックス
をオンにし、削除 を選択します。 グローバルフィールドバス構成が、ライブラリから削除され、リストが更新されます。
削除した構成に登録しているコントローラは、構成を失いません。削除されたグローバルフィールドバス構成は、フィールドバス構成ライブラリワークスペースのリストから削除されます。フィールドバス構成は、グローバルフィールドバス構成に登録されているフィールドバスのフィールドバスワークスペースのリストには残ります。目に見える変化は、フィールドバス構成がグローバルフィールドバス構成からローカルフィールドバス構成に変換されることです。(ライブラリリンク列の入力はクリアされます)。
フィールドバス構成ライブラリ - 既存のフィールドバス構成からのグローバルフィールドバス構成の作成
プラント構造ワークスペース
で (対象のフィールドバス構成を含む) コントローラを選択します。メニューバーでフィールドバス& SoftPLC
を選択します。フィールドバスメニューから、ライブラリに追加する 1 つ以上のフィールドバス信号構成を選択します。ドロップダウンメニューから 管理、ライブラリに追加の順に選択します。
グローバル構成の作成ダイアログウィンドウが開きます。作成を選択します。
選択したローカル構成がグローバル構成になり、グローバルフィールドバス構成ライブラリに保存されます。
ローカルの変更がコントローラまたは Web GUI に行われた場合、以下の 2 つのオプションがあります:
自動で元に戻す: コントローラへの変更は、グローバルフィールドバス構成には適用されず、グローバル構成が適用を続けます。
リンク解除: コントローラへの変更がコントローラのフィールドバス構成に適用され、グローバル構成へのリンクが切断されます。その結果、グローバルフィールドバス構成はコントローラへの配信リストから即座に削除されます。
左側のメニューバーでライブラリ
を選択します。 グローバルフィールドバスライブラリ
に移動します。ワークスペースには、グローバルフィールドバス構成のリストが表示され、新しく追加されたフィールドバス構成がリストに表示されるようになります。
フィールドバス構成ライブラリ - グローバルフィールドバス構成の配信
左側のメニューバーでライブラリ
を選択します。 グローバルフィールドバスライブラリ
に移動します。ワークスペースは、グローバルフィールドバス構成のリストを表示します。
配信するフィールドバス構成のチェックボックス
を選択します。管理 を選択し、ドロップダウンメニューから配信 を選択します。同じタイプかつ同じソフトウェアバージョンのコントローラ間でのみ配布できます。
グローバル構成の配信ダイアログウィンドウが開きます。
ダイアログウィンドウの右側で 1 つ以上のコントローラを選択します。追加を選択します。
グローバル構成への更新によって、配信されたコピーが更新されます。グローバル構成の変更は選択されたコントローラに適用されます。
ローカルの変更がコントローラまたは Web GUI に行われた場合、以下の 2 つのオプションがあります:
自動で元に戻す: コントローラへの変更は、グローバルフィールドバス構成には適用されず、グローバル構成がまだ有効です。
リンク解除: コントローラへの変更がコントローラのフィールドバス構成に適用され、グローバル構成へのリンクが切断されます。その結果、グローバル構成はコントローラへの配信リストから即座に削除されます。
変更は、グローバルフィールドバス構成ライブラリに自動的に保存されます。
影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター が表示されます。
フィールドバス構成ライブラリ - グローバルフィールドバス構成の編集
左側のメニューバーでライブラリ
を選択します。 グローバルフィールドバスライブラリ
に移動します。ワークスペースは、グローバルフィールドバス構成のリストを表示します。
編集するフィールドバス構成をダブルクリックします。
選択したフィールドバス構成の構成ウィンドウが表示されます。
フィールドバス構成は、グローバルフィールドバス構成ライブラリに自動的に保存されます。
影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター が表示されます。
フィールドバス構成ライブラリ - グローバルフィールドバス構成のエクスポート
左側のメニューバーでライブラリ
を選択します。 グローバルフィールドバス構成ライブラリ
に移動します。ワークスペースは、グローバルフィールドバス構成のリストを表示します。
エクスポートするグローバルフィールドバス構成のチェックボックス
を選択します。エクスポートを選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
デフォルトのファイル名は configuration>.json です。保存をクリックします。
フィールドバス構成ライブラリ - 配信リストからフィールドバス構成サブスクリプションを削除
グローバルフィールドバス構成の配信リストは、登録リストと同様です。グローバルフィールドバス構成に変更を行うと、変更はすべての登録先に反映されます。配信リストは登録を管理します。
グローバルフィールドバス構成のチェックボックスを 1 つ選択して、配信リストの内容を表示します。配信リストは、選択した構成に登録しているすべてのコントローラを示します。
1 つのコントローラからグローバルフィールドバス構成の登録を削除するには:
プラント構造ワークスペース
でコントローラを選択します。フィールドバス & SoftPLC
に移動します。フィールドバスワークスペースに、締め付けプログラムのリストが表示されます。
配信されたフィールドバス構成には、ライブラリのリンク列のエントリにはいが示されます。
選択したフィールドバス構成のチェックボックス
を選択します。管理を選択した後、リンク解除をドロップダウンメニューを選択します。
選択されたフィールドバス構成のライブラリのリンク列のエントリがクリアされます。
左側のメニューバーでライブラリ
を選択します。 フィールドバス構成ライブラリ
に移動します。削除されたフィールドバス構成のチェックボックス を選択します。
配信リストが更新され、コントローラ名がリストから削除されます。
グローバル設定ライブラリ - グローバルイベント構成の削除
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーから設定
ライブラリタブを選択します。ワークスペースは、グローバル設定構成のリストを表示します。
削除する各構成に、左端の列のチェックボックス
を選択します。管理 を選択し、次にドロップダウンメニューから 削除 を選択します。
グローバル設定構成が、ライブラリから削除され、リストが更新されます。
削除した構成に登録しているコントローラは、構成を失いません。削除されたグローバル構成は、設定ライブラリワークスペースのリストから削除されます。構成は、グローバル構成に登録している構成のイベント構成ワークスペースのリストにはまだあります。目に見える変更は、構成がグローバルなイベント構成からローカルのイベント構成に変換されることです(設定のイベントの下にあるライブラリリンクもクリアされます)。
グローバル設定ライブラリ
パラメータ | 説明 |
|---|---|
チェックボックス | イベント構成テンプレートを選択します。 |
名前 | イベント構成テンプレートの名前を示します。 |
最終変更 | ToolsTalk 2 時間で表される最終変更。 |
変更者 | 最終変更の変更者。 |
バージョン | イベント構成テンプレートでサポートされているコントローラソフトウェアのバージョン。 |
| 実際の列ではありません。 構成のリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
コントローラタイプ | イベント構成の対象コントローラタイプを示します。 |
顧客キー | 新しいグローバルイベント構成を作成する場合の既定値はなしです。既存のコントローラからグローバルイベント設定を作成するときに、コントローラの Iam.CustomerKey から取得した値。 |
構成のコマンドボタン設定
コマンド | 説明 |
|---|---|
| |
追加 |
|
管理 |
|
以前のイベント構成テンプレートが存在しない場合、作業スペース領域は空になります。追加を選択して新しいイベント構成テンプレートを作成するか、既存のテンプレートをダブルクリックしてパラメータを表示または編集します。
グローバル設定ライブラリ - グローバルイベント構成の作成または読み込み
グローバルイベント構成の作成:
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーから設定
ライブラリタブを選択します。ワークスペースは、グローバルイベント構成のリストを表示します。
追加を選択します。
新しいイベント構成の作成 ダイアログボックスが表示されます。
次のパラメータを入力します。
構成に名前を付けます。
コントローラータイプをドロップダウンリストから選択します。
構成に使用するコントローラソフトウェアのバージョンを選択します。
ダイアログウィンドウで追加を選択します。
イベント構成ウィンドウが表示されます。各セクションを展開して、特定のパラメータを設定します。
新しい構成は、グローバル設定ライブラリに自動的に保存されます。
既存のグローバルイベント構成のインポート:
左側のメニューバーでライブラリ
を選択します。 グローバル設定ライブラリ
に移動します。ワークスペースは、グローバルイベント構成のリストを表示します。
リストに新しい構成を追加するには、追加を選択します。
新しいイベント構成の作成 ダイアログウィンドウが表示されます。
インポートタブを選択します。
ファイルを開くを選択します。
インポートファイルを読み取るための参照ウィンドウが開きます。
必要なインポートファイルを選択します。ファイルは <controller_name>.json の形式である必要があります。開くを選択します。
ショートカットウィンドウで追加を選択します。
インポートした構成のイベント構成ウィンドウが表示されます。
構成は、イベント構成ライブラリに自動的に保存されます。
グローバル設定ライブラリ - グローバルイベント構成の削除
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーから設定
ライブラリタブを選択します。ワークスペースは、グローバル設定構成のリストを表示します。
削除する各構成に、左端の列のチェックボックス
を選択します。管理 を選択し、次にドロップダウンメニューから 削除 を選択します。
グローバル設定構成が、ライブラリから削除され、リストが更新されます。
削除した構成に登録しているコントローラは、構成を失いません。削除されたグローバル構成は、設定ライブラリワークスペースのリストから削除されます。構成は、グローバル構成に登録している構成のイベント構成ワークスペースのリストにはまだあります。目に見える変更は、構成がグローバルなイベント構成からローカルのイベント構成に変換されることです(設定のイベントの下にあるライブラリリンクもクリアされます)。
グローバル設定ライブラリ - グローバル構成の配信
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーから設定
ライブラリタブを選択します。ワークスペースは、グローバルイベント構成のリストを表示します。
配信するグローバルイベントのチェックボックス
を選択します。管理 を選択し、ドロップダウンメニューから配信 を選択します。
同じタイプかつ同じソフトウェアバージョンのコントローラ間でのみ配布できます。
グローバル構成の配信ダイアログウィンドウが開きます。
配信に含める各構成のチェックボックス
を選択します。構成タイプは個別に選択できます。構成間には特定の依存関係があります。グローバル構成の配信を選択すると、追加の構成がデフォルトで選択される場合があります。
ダイアログウィンドウの右側で 1 つ以上のコントローラを選択します。
ダイアログウィンドウで追加を選択します。
ダイアログウィンドウが閉じ、コントローラが 配信先 のリストに追加されます。設定 のイベント メニューに新しい [ライブラリ] リンクが追加されます。
選択された構成は、ToolsTalk 2.のコントローラのみに配信されます。
新しい構成を配布すると、既存の構成が削除され、ライブラリテンプレートの構成に置き換えられます。
グローバル設定ライブラリ - 配信リストからグローバルプログラム サブスクリプションを削除
コントローラから [グローバル設定] リンクを削除します。
プラント構造ワークスペース
でコントローラを選択します。設定
に移動します。「イベント」ワークスペースに、リンクされたグローバル設定が表示されます。
管理を選択した後、リンク解除をドロップダウンメニューから選択します。
左側のメニューバーでライブラリ
を選択します。 グローバル設定ライブラリ
に移動します。削除された設定のチェックボックス
をオンにします。配信リストが更新され、コントローラ名がリストから削除されます。
グローバル設定ライブラリ - グローバルイベント構成の編集
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーから設定
ライブラリタブを選択します。ワークスペースは、グローバルイベント構成のリストを表示します。
編集する構成をダブルクリックします。選択した構成タイプの構成ウィンドウが表示されます。
変更は、グローバル設定構成ライブラリに自動的に保存されます。
影響するすべてのコントローラには、プラント構造ワークスペースにプッシュインジケーター が表示されます。
グローバル設定ライブラリ - グローバルイベント構成のエクスポート
グローバルイベントテンプレートは、エクスポートして、別の ToolsTalk 2のインストールまたはToolsTalk 2 ステーションセットアップのインストールで再利用 (インポート) できます。
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーから設定
ライブラリタブを選択します。ワークスペースは、グローバルイベント構成のリストを表示します。
エクスポートするコントローラテンプレートのチェックボックス
を選択します。エクスポートを選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
既定ファイル名は <Configuration>.json です。保存を選択します。
エクスポートされたファイルには、*.json 拡張子で任意の名前が指定できます。
エクスポートされた *.json ファイル内で、コントローラテンプレートには、コントローラ列の名前が指定されます。コントローラテンプレートがインポートされると、コントローラテンプレートに指定された名前は、ファイル名に関係なく *.json ファイル内のこのフィールドから取られます。つまり、インポートしたコントローラテンプレートはインポートしたファイル名と名前が異なる場合があります。
コントローラテンプレートに同一の名前が付くことを回避するため、エクスポートする前にテンプレートに固有な名前を指定して、ファイル名を変更しないことを推奨します。
プログラムテンプレート

ライブラリ > プログラムテンプレート
マルチステップ締め付けプログラムのテンプレートを作成します。新しいマルチステッププログラムを作成する際、テンプレートは、マルチステッププログラムを構築する基盤として使用できます。
追加をクリックして新しいテンプレートを作成します。
プログラムテンプレートリストのテンプレートをダブルクリックして、既存のテンプレートを変更します。テンプレートはプログラムにリンクされるのではなく、コピーされるので、そのテンプレートに基づくマルチステッププログラムには影響しません。
プログラムテンプレートワークスペース
左側のメニューバーでライブラリ
を選択します。 プログラムテンプレートライブラリ
に移動します。ワークスペースエリアが、グローバル締め付けプログラムテンプレートのリストを表示します。
列 | 説明 |
|---|---|
チェックボックス | 締め付けプログラムテンプレートを選択します。 |
名前 | 締め付けプログラムテンプレートの名前が表示されます。プッシュインジケーター |
戦略 | 締め付けプログラムテンプレートに選択されている締め付け戦略。 |
ターゲット | 最終目標は、トルク値または角度値で表されます。 |
最終変更 | 最後の変更が行われたとき, ToolsTalk 2時間で表現されます。 |
変更者 | 最後に変更を加えたユーザーを示します。 |
バージョン | グローバル締め付けプログラムテンプレートをサポートできるコントローラソフトウェアのバージョン。 |
| 実際の列ではありません。 締め付けプログラムテンプレートのリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
コントローラータイプ | 締め付けプログラムテンプレートのコントローラタイプを示します。 |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
1 つ以上のグローバル締め付けプログラムテンプレートチェックボックスを選択して配信リストを表示します。配信リストは、選択したプログラムテンプレートに現在登録しているすべてのコントローラを示します。
グローバル締め付けプログラムテンプレートがない場合は、ワークスペースエリアは空白です。追加を選択して新しい締め付けプログラムテンプレートを作成するか、既存の締め付けプログラムテンプレートをダブルクリックしてパラメータを表示または編集します。
締め付けプログラムテンプレートのインポート
事前にエクスポートされた締め付けプログラムテンプレートは、ToolsTalk 2のインストールまたはToolsTalk 2 ステーションセットアップのインストールにインポートできます。
左側のメニューバーでライブラリ
を選択します。 プログラムテンプレート
に移動します。ワークスペースは、締め付けプログラムテンプレートのリストを表示します。
追加を選択し、新しい締付けプログラムの作成 テンプレートの インポート タブを選択します。
ファイルを開く を選択し、目的のインポートファイルを選択します。ファイルは <tightening_program_template_name>.json の形式である必要があります。開くを選択します。
ワークスペースは、締め付けプログラムテンプレートの更新ずみのリストを表示します。
エクスポートされたファイルには、*.json 拡張子で任意の名前が指定できます。*.json ファイルには、締め付けプログラムテンプレートのリストに示されている締め付けプログラムテンプレート名が含まれます。締め付けプログラムテンプレートがインポートされると、締め付けプログラムテンプレートに指定された名前は、ファイル名に関係なく *.json ファイル内から取られます。つまり、インポートした締め付けプログラムテンプレートはインポートしたファイル名と名前が異なる場合があります。締め付けプログラムテンプレートに同一の名前が付くことを回避するため、エクスポートする前にテンプレートに固有な名前を指定して、ファイル名を変更しないことを推奨します。
コントローラ構成ライブラリ
コントローラライブラリのはじめに
コントローラテンプレートは、仮想コントローラ全体です。ユーザーは、物理的コントローラにアクセスする必要なく、すべてのコントローラ構成を作成、編集、分析できます。コントローラテンプレートは、すべて空のパラメータ値で最初から作成できます。コントローラテンプレートは、有効な構成とパラメータで既存のコントローラをコピーして作成できます。
コントローラテンプレートは、ツールが接続されていないので、ツールの情報は表示しません。ハードウェアに関する情報と構成は使用できません。さまざまなサーバーなど、サポートしている機能の構成はテンプレートから使用できません。テンプレートがコントローラに配信される際、これらのパラメータは確認または追加される必要があります。
コントローラライブラリワークスペース
パラメータ | 説明 |
|---|---|
チェックボックス | コントローラテンプレートを選択します。 |
コントローラ | コントローラテンプレートの名前を示します。 |
最終変更 | ToolsTalk 2時間で表される最終変更。 |
変更者 | 最終変更の変更者。 |
バージョン | コントローラテンプレートでサポートされているコントローラソフトウェアのバージョン。 |
| 実際の列ではありません。 構成のリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
コントローラータイプ | 構成の対象コントローラタイプを示します。 |
コマンド | 説明 |
|---|---|
追加 |
|
管理 |
|
コントローラテンプレートがない場合は、ワークスペースエリアは空白です。追加をクリックして新しいコントローラテンプレートを作成するか、既存のテンプレートをダブルクリックしてパラメータを表示または編集します。
コントローラー構成ライブラリ - 新規コントローラーテンプレートの作成
コントローラテンプレートは、仮想コントローラ全体です。ユーザーは、物理的コントローラにアクセスする必要なく、すべてのコントローラ構成を作成、編集、分析できます。コントローラテンプレートは、すべて空のパラメータ値で最初から作成できます。コントローラテンプレートは、有効な構成とパラメータで既存のコントローラをコピーして作成できます。
コントローラテンプレートは、ツールが接続されていないので、ツールの情報は表示しません。ハードウェアに関する情報と構成は使用できません。さまざまなサーバーなど、サポートしている機能の構成はテンプレートから使用できません。テンプレートがコントローラに配信される際、これらのパラメータは確認または追加される必要があります。
左側のメニューバーでライブラリ
を選択します。 コントローラ構成
に移動します。ワークスペースは、コントローラテンプレートのリストを表示します。
追加を選択します。
新しいコントローラーテンプレートの作成 ダイアログボックスが表示されます。
次のパラメータを入力します。
コントローラテンプレートに名前を付けます。
コントローラータイプをドロップダウンメニューから選択します。
ドロップダウンメニューからコントローラソフトウェアのバージョンを選択します。
追加を選択します。
ダイアログウィンドウが閉じ、コントローラテンプレートが更新されます。
正しいコントローラソフトウェアのバージョンを選択することが重要です。テンプレートは、同じソフトウェアバージョンを持つコントローラにしか配信できません。
コントローラ構成ライブラリ -コントローラーテンプレートの削除
左側のメニューバーでライブラリ
を選択します。 コントローラ構成
を選択します。ワークスペースは、コントローラテンプレートのリストを表示します。
削除するコントローラテンプレートのチェックボックスを選択します。
管理 を選択し、ドロップダウンメニューから削除 を選択します。テンプレートがリストから削除されます。
コントローラ構成ライブラリ - 既存のコントローラからのテンプレートの作成
コントローラテンプレートは、仮想コントローラ全体です。ユーザーは、物理的コントローラにアクセスする必要なく、すべてのコントローラ構成を作成、編集、分析できます。コントローラテンプレートは、すべて空のパラメータ値で最初から作成できます。コントローラテンプレートは、有効な構成とパラメータで既存のコントローラをコピーして作成できます。
コントローラテンプレートは、ツールが接続されていないので、ツールの情報は表示しません。ハードウェアに関する情報と構成は使用できません。さまざまなサーバーなど、サポートしている機能の構成はテンプレートから使用できません。テンプレートがコントローラに配信される際、これらのパラメータは確認または追加される必要があります。
プラント構造ワークスペース
でコントローラを選択します。ドロップダウンメニューから 管理、ライブラリに追加を選択します。
ハードウェアとツールに依存するものを除く、すべてのコントローラ構成は、コントローラ構成ライブラリにコピーされます。
左側のメニューバーでライブラリ
を選択します。 ワークスペースウィンドウの上部にあるメニューバーからコントローラーの構成
を選択します。ワークスペースにコントローラ構成のリストが表示され、テンプレートとして使用できる新しく作成されたコントローラ構成がリストに表示されます。
コントローラテンプレートの名前はソースコントローラ名からコピーされます。
コントローラテンプレートには、ライブラリで一意の名前を付けることを推奨します。
コントローラ構成ライブラリ - コントローラーテンプレートの配信
コントローラテンプレートは、仮想コントローラ全体です。ユーザーは、物理的コントローラにアクセスする必要なく、すべてのコントローラ構成を作成、編集、分析できます。コントローラテンプレートは、すべて空のパラメータ値で最初から作成できます。コントローラテンプレートは、有効な構成とパラメータで既存のコントローラをコピーして作成できます。
コントローラテンプレートは、ツールが接続されていないので、ツールの情報は表示しません。ハードウェアに関する情報と構成は使用できません。さまざまなサーバーなど、サポートしている機能の構成はテンプレートから使用できません。テンプレートがコントローラに配信される際、これらのパラメータは確認または追加される必要があります。
コントローラテンプレートまたはその一部は、1 つ以上のコントローラに配信できます。配信とは、構成がテンプレートからコピーされ、配信先のコントローラで許可されている場合に、構成を上書きすることです。
コントローラテンプレートソフトウェアのバージョンは、配信先のコントローラソフトウェアのバージョンと同じでなければなりません。一致しない場合、配信はできません
左側のメニューバーでライブラリ
を選択します。 コントローラ構成
に移動します。ワークスペースは、コントローラテンプレートのリストを表示します。
配信するコントローラテンプレートのチェックボックスを選択します。
管理 を選択し、ドロップダウンメニューから配信 を選択します。
同じタイプかつ同じソフトウェアバージョンのコントローラ間でのみ配布できます。
コントローラテンプレートの配信ダイアログウィンドウが開きます。
配信に含める各構成のチェックボックス
を選択します。構成タイプは個別に選択できます。構成間には特定の依存関係があります。テンプレート構成を配信することを選択すると、追加の構成がデフォルトで選択される場合があります。
ダイアログウィンドウの右側で 1 つ以上のコントローラを選択します。
ダイアログウィンドウで配信をクリックします。
ダイアログウィンドウが閉じます。
選択された構成は、ToolsTalk 2.のコントローラのみに配信されます。
配信に選択された構成によって、既存の構成が削除され、テンプレートからのコントローラ構成で代替されます。
コントローラー構成ライブラリ - コントローラーテンプレートの編集または構成
コントローラテンプレートの編集は、通常のコントローラ構成と同様です。ほとんどのメニューアイコンとパラメータ設定は、ToolsTalk 2GUI の実際のコントローラの場合と同一です。
左側のメニューバーでライブラリ
を選択します。 コントローラ構成
に移動します。ワークスペースは、コントローラテンプレートのリストを表示します。
コントローラテンプレートのリストの名前フィールドをダブルクリックします。
コントローラワークスペースは実際のコントローラと同一です。これがコントローラテンプレートであることを示すため、コントローラメニューの背景色は、濃い灰色ではなくで薄い灰色になっています。
コントローラ構成ライブラリ - コントローラテンプレートのエクスポート
コントローラテンプレートは、仮想コントローラ全体です。ユーザーは、物理的コントローラにアクセスする必要なく、すべてのコントローラ構成を作成、編集、分析できます。コントローラテンプレートは、すべて空のパラメータ値で最初から作成できます。コントローラテンプレートは、有効な構成とパラメータで既存のコントローラをコピーして作成できます。
コントローラテンプレートは、ツールが接続されていないので、ツールの情報は表示しません。ハードウェアに関する情報と構成は使用できません。さまざまなサーバーなど、サポートしている機能の構成はテンプレートから使用できません。テンプレートがコントローラに配信される際、これらのパラメータは確認または追加される必要があります。
コントローラーテンプレートは、エクスポートして、別の ToolsTalk 2のインストールまたはToolsTalk 2 ステーションセットアップのインストールで再利用 (インポート) できます。
左側のメニューバーでライブラリ
を選択します。 コントローラ構成
に移動します。ワークスペースは、コントローラテンプレートのリストを表示します。
エクスポートするコントローラテンプレートのチェックボックスを選択します。
管理 を選択し、ドロップダウンメニューからエクスポート を選択します。
エクスポートファイルを保存するための参照ウィンドウが開きます。
デフォルトのファイル名は <controller_template_name>.json です。保存を選択します。
エクスポートされたファイルには、*.json 拡張子で任意の名前が指定できます。
エクスポートされた *.json ファイル内で、コントローラテンプレートには、コントローラ列の名前が指定されます。コントローラテンプレートがインポートされると、コントローラテンプレートに指定された名前は、ファイル名に関係なく *.json ファイル内のこのフィールドから取られます。つまり、インポートしたコントローラテンプレートはインポートしたファイル名と名前が異なる場合があります。
コントローラテンプレートに同一の名前が付くことを回避するため、エクスポートする前にテンプレートに固有な名前を指定して、ファイル名を変更しないことを推奨します。
コントローラ構成ライブラリ - コントローラテンプレートのインポート
コントローラテンプレートは、仮想コントローラ全体です。ユーザーは、物理的コントローラにアクセスする必要なく、すべてのコントローラ構成を作成、編集、分析できます。コントローラテンプレートは、すべて空のパラメータ値で最初から作成できます。コントローラテンプレートは、有効な構成とパラメータで既存のコントローラをコピーして作成できます。
コントローラテンプレートは、ツールが接続されていないので、ツールの情報は表示しません。ハードウェアに関する情報と構成は使用できません。さまざまなサーバーなど、サポートしている機能の構成はテンプレートから使用できません。テンプレートがコントローラに配信される際、これらのパラメータは確認または追加される必要があります。
事前にエクスポートされたコントローラーテンプレートは、ToolsTalk 2のインストールまたはToolsTalk 2 ステーションセットアップのインストールにインポートできます。
左側のメニューバーでライブラリ
を選択します。 コントローラ構成
に移動します。ワークスペースは、コントローラテンプレートのリストを表示します。
追加を選択し、新しいコントローラテンプレートの作成 ウィンドウの インポート タブを選択します。
ファイルを開く を選択し、目的のインポートファイルを選択します。ファイルは <controller_template_name>.json の形式である必要があります。開くを選択します。
ワークスペースは、コントローラテンプレートの更新されたリストを表示します。
エクスポートされたファイルには、*.json 拡張子で任意の名前が指定できます。*.json ファイルには、コントローラテンプレートのリストに示されているコントローラテンプレート名が含まれます。コントローラテンプレートがインポートされると、コントローラテンプレートに指定された名前は、ファイル名に関係なく *.json ファイル内から取られます。つまり、インポートしたコントローラテンプレートはインポートしたファイル名と名前が異なる場合があります。コントローラテンプレートに同一の名前が付くことを回避するため、エクスポートする前にテンプレートに固有な名前を指定して、ファイル名を変更しないことを推奨します。
[システム管理] タブでの作業
ToolsTalk 2のシステム管理タブ は、左側のメニューバーにあり、次の機能を提供します。
システム管理タブ | 説明 |
|---|---|
| コントローラソフトウェアとデータ管理 すべてのコントローラへのソフトウェア更新を管理します。カスタム・セクションにコントローラを体系づけてください。 |
| スケジュールされたタスク コントローラ構成は、スケジュールした間隔でエクスポートとインポートができます。 |
| 構成の比較 エクスポートされた 2 つのファイルを横に並べて比較します。 |
| 機能管理システム (FMS) 選択されたコントローラ間でライセンスされる機能の配信を管理します。 |
| ユーザーグループ ToolsTalk 2の情報を表示または編集するための異なる権限を、異なるユーザーグループに指定できます。 |
コントローラソフトウェアとデータ管理
コントローラの結果と設定のエクスポート。
コントローラ設定のインポート。
新しいコントローラソフトウェアの読み込み。
コントローラソフトウェア間の切り替え。
レポートの生成。
カスタム・セクションにコントローラを体系づけてください。
コントローラ構成パラメータをエクスポートし、コントローラ・プログラムをそのまま(変化なし)にしておいてください。
コントローラー構成をインポートします。
ソフトウェアの更新は、コントローラのソフトウェアを変更します。コントローラ名、IP アドレス、サーバー接続は、手作業で有力可能です。
スケジュールされたタスク
コントローラの結果と設定のエクスポート。
コントローラ設定のインポート。
選択したコントローラへのエクスポートとインポートタスクのスケジュール。
データベースのメンテナンス
コントローラー構成を押します。
エクスポート/インポートはコントローラの構成パラメータを変更し、コントローラのプログラムは変更しません。コントローラ名、IP アドレス、サーバー接続は、この操作では影響されません。
機能管理システム(FMS)
コントローラへのライセンスされた機能の追加。
コントローラからのライセンスされた機能の削除。
ライセンスされた機能のプールの管理。
必要に応じたアトラスコプコからの追加機能の読み込みと、不要になった場合の機能の返却。
ユーザーグループ
異なるユーザーグループの作成。
フォルダと個別コントローラを閲覧する権利を管理します。
ToolsTalk 2機能の構成権限の管理。
コントローラパラメータと機能の構成権限の管理。
コントローラソフトウェアとデータ管理
コントローラソフトウェアとデータ管理のはじめに
システム管理 に移動し、コントローラソフトウェアとデータ管理 を選択します。
コントローラの結果、構成、設定のエクスポート。
コントローラ設定のインポート。
新しいコントローラソフトウェアの読み込み。
コントローラソフトウェア間の切り替え。
レポートの生成。
カスタム・セクションにコントローラを体系づけてください。
コントローラを検索します。
エクスポート/インポート: コントローラの構成パラメータを変更し、コントローラのソフトウェアプログラムは変更しません。
ソフトウェア更新: コントローラのソフトウェアを変更し、コントローラの構成のパラメータは変更しません。
コントローラ名、IP アドレス、サーバー接続は、この操作では影響されません。
列 | 説明 |
|---|---|
コントローラ | コントローラ名。 |
コントローラータイプ | 適用されるコントローラの種類。 |
工場ポート | オン: 工場出荷時ポート経由で有効な通信を使用するコントローラ用。 接続が無効になると (コントローラ設定でオフに設定)、テキストは表示されません。 |
現在のバージョン | 現在のソフトウェアバージョン。 赤: ソフトウェアは承認済みのソフトウェアリストにありません。リストに追加するには、追加コマンドボタンをクリックして、現在のソフトウェアバージョンを入力します。 黒: ソフトウェアは承認済みのソフトウェアリストにあります。 |
保存したバージョン | 保存された非アクティブなソフトウェアバージョン。 |
操作 | 以下の様な、継続中の作業を示します。 インポートおよびエクスポートの間のタスク状態と結果および、ソフトウェア更新のタスク状態と結果。 |
コントローラ名の左側にあるボックスを選択して、次の表に示すオプションを有効にします。
ボタン | 説明 |
|---|---|
再起動 | 選択したコントローラを再起動するには |
レポートの生成 | SoftwareVersionReportcsv.csv ファイルを生成して、保存の選択のためのダイアログポップアップウィンドウを開きます。 |
ソフトウェア |
|
エクスポート/インポート |
|
ボタン | 説明 |
|---|---|
編集 | カスタム・セクションを体系化する為に、編集モードをアクティベートおよび非アクティベートします。 |
+ | カスタム・セクションのフォルダー(またはサブフォルダ)を追加します。編集モード以外のときには見えません。 |
- | カスタム・セクションのフォルダー(またはサブフォルダ)を削除します。編集モード以外のときには見えません。 |
エクスポートとインポートの機能は、コントローラ構成 とスケジュールしたエクスポートとインポート にもあります。ファイルの形式と結果は同じです。
ワークスペースウィンドウの右側には、コントローラでの実行が許可されている承認済みのソフトウェアのリストがあります。承認されていないソフトウェアには、現在のバージョン列に赤のマークが付いています。
コマンド | 説明 |
|---|---|
追加 | ショートカットメニューを開いて、リストに新しいソフトウェアバージョンを入力します。 |
削除 | 1 つ以上の選択したソフトウェアバージョンをリストから削除します。 |
レポートの生成では、列に次の情報の行列を含む SoftwareVersionReportcsv.csvファイルを作成します。
コントローラ名。
現在のソフトウェアバージョン。
保存されたソフトウェアバージョン。
現在のソフトウェアが承認されているかどうかの表示。
プラント構造のコントローラを体系付け、以下のショートカット・オプションにアクセスする為に、コントローラ名をクリックしてください。コントローラ名の背景色は、水色に変化します。
いかなる時も、20個を上限にコントローラを選ぶことができます。
コントローラーを右クリックすると、以下のオプションが表示されます。
ショートカット・メニュー | 説明 |
|---|---|
新しいコントローラーの追加 | プラント構造コントローラ・リストに、新しいコントローラを追加します。 |
コントローラーの接続 | コントローラの状態をオンラインに設定します。 |
コントローラーの切断 | コントローラの状態をオフラインに設定します。コントローラ名は、抹消されます。 |
稼働状態をリセットします。 | コントローラの状態を強制的にリセットします。現在の状態をクリアーし、アイドル状態にリセットします。これは、開始したプロセスを中断することはありません。そして、接続が切れた場合でもフェールセーフの役割を果たします。 |
削除 | プラント構造コントローラ・リストからコントローラを削除します。 コントローラが全てのコントローラフォルダから削除されたなら、それは永久に削除されたことを意味します。 |
コントローラの検索
[コントローラソフトウェアとデータ管理] ワークスペースには、2 つの検索フィールドがあります。1つのフィールドは、カスタムセクションにおけるコントローラを検索するだけです。そして、もう一つが、コントローラリストにおける全てのコントローラを検索します。
検索フィールドに、コントローラ名の2個以上の文字を入力してください。
コントローラ名またはコントローラのタイプを利用して、検索することが可能です。メインのコントローラリストで、ソフトウエアバージョンを検索することも可能です(現在のバージョン)。
コントローラ構成とツールログのエクスポートとインポート
エクスポート/インポートの機能を用いて、外部プログラムでの分析のために、結果メニューでアクセスできるイベントと締め付け結果をエクスポートするとともに、コントローラ間で締め付けプログラム、バッチ、およびコントローラ構成を転送します。
エクスポート/インポートコマンドは、次のために使用できます:
さらに処理するために締め付け結果やイベントをエクスポートする。
アトラスコプコのサービスエンジニアによるデバッグ作業のための、ログファイルのエクスポート。
別のコントローラに構成をコピーするために使用できるコントローラ構成全体のエクスポート。
違いを見るための、エクスポートされた 2 つの構成の比較。
コントローラー構成のインポート。
エクスポート中
システム管理 タブ
 を選択します。
を選択します。コントローラソフトウェアとデータ管理
 に移動します。
に移動します。コントローラのチェックボックス
を選択します。コントローラがオンラインの場合にのみ、コントローラ構成のエクスポートができます。エクスポート/インポートを選択して、次のいずれかをエクスポートします。
パラメータ
説明
エクスポート
すべてのコントローラ情報をエクスポートします。
エクスポートされたファイルのファイル名と拡張子は、<Filename>.tar.gz のようになります。
構成のエクスポート
設定と構成をエクスポートします。
エクスポートされたファイルのファイル名と拡張子は、<Filename>.tar.gz のようになります。
ツールログのエクスポート
接続されているツールからログ (締め付けおよびハードウェアの情報) をエクスポートします。SRB、TBP、STB に使用できます。
エクスポートは atlas_tool_i.zip と ExportInfo.txt から構成されます。
エクスポートファイルを保存する場所を選択して、OK を選択します。
ファイル名は、コントローラを識別する部分とタイムスタンプの部分で構成されます。
コントローラー構成のインポート
インポートコマンドの目的は、コントローラ設定をコピーして、以前にエクスポートしたソースファイルを再利用し、<Filename>.tar.gz のようなファイル名と拡張子を持つことです。
左側のメニューバーでシステム管理
を選択します。ワークスペースウィンドウの上部にあるメニューバーからコントローラソフトウェアとデータ管理
を選択します。コントローラのチェックボックス
を選択します。コントローラがオンラインの場合にのみ、コントローラ構成のインポートができます。エクスポート/インポートを選択します。
選択ファイルにインポートのダイアログウィンドウが開きます。
ファイルを開くを選択して、選択したファイルを参照します。
ファイルを選択して開くを選択します。
ファイルパスが示され、インポートボタンが有効になります。インポートを選択します。
再起動後、インポートしたファイルが新しい構成設定で使用されます。
ファイルのインポートによって、コントローラのプログラムが変更されることはありません。工場出荷時の IP アドレス以外のすべての設定と構成が変更されます。
コントローラーソフトウェアの更新
コントローラソフトウェアの更新と切り替えは、緊密に接続されている 2 つの異なるタスクです。コントローラは、アクティブなバージョンとパッシブなバージョンの、2 つの異なるソフトウェアバージョンをインストールできます。2 つのバージョン間の切り替えは簡単です。コントローラソフトウェアの切り替えでは、アクティブなソフトウェアとパッシブなソフトウェアを切り替えます。
新しいソフトウェアをコントローラに読み込むには:
システム管理 タブ
を選択します。コントローラソフトウェアとデータ管理
に移動します。コントローラのチェックボックス
を選択します。コントローラがオンラインの場合にのみ、コントローラソフトウェアの更新ができます。ソフトウェア を選択し、次にドロップダウンメニューから ソフトウェア更新 を選択します。
ソフトウェア更新のダイアログウィンドウが開きます。
ファイルを開くを選択して、選択したファイルを参照します。
ファイル名は -px2it.zip で終わるようにします。
ファイルをマークして開くを選択します。
ファイルパスが示され、ソフトウェア更新ボタンが有効になります。ボタンを選択してソフトウェアの読み込みを始めます。
コントローラーソフトウェアの切り替え
コントローラソフトウェアの更新と切り替えは、緊密に接続されている 2 つの異なるタスクです。コントローラは、アクティブなバージョンとパッシブなバージョンの、2 つの異なるソフトウェアバージョンをインストールできます。2 つのバージョン間の切り替えは簡単です。コントローラソフトウェアの切り替えでは、アクティブなソフトウェアとパッシブなソフトウェアを切り替えます。
コントローラに保存されているソフトウェアを有効にするには:
左側にあるメニューバーでシステム管理タブ
を選択します。コントローラソフトウェアとデータ管理
 に移動します。
に移動します。コントローラのチェックボックス
を選択します。コントローラがオンラインの場合にのみ、コマンドが実行できます。ソフトウェア を選択し、次にドロップダウンメニューから 保存済みソフトウェアの有効化 を選択します。
ワークスペースのソフトウェア更新列に、次のメッセージが示されます。
保存されたソフトウェアのアクティブ化。
保存されたソフトウェアがアクティブ化されました。コントローラーの再起動中。
コントローラソフトウェアレポートの生成
コントローラ更新ワークスペースには、すべてのコントローラと現在実行中のソフトウェアと保存されているソフトウェアの両方が表示されます。
ファイルのリストを生成するには:
左側にあるメニューバーでシステム管理タブ
を選択します。コントローラソフトウェアとデータ管理
に移動します。レポートの生成を選択します。
ブラウザダイアログウィンドウが開きます。
ファイルの場所を選択して、保存を選択します。
SoftwareVersionResultcsv.csv ファイルが選択された場所に書き込まれます。
カスタムセクションの管理
システム管理タブ
に移動し、コントローラソフトウェアとデータ管理 を選択します。カスタム・セクションで、 編集
 を選択して、編集モードに入ります。編集モードに入ると、色が水色に変わりますが、それは選択されたことを示します。+ と -の新しい2つのボタンが現れます
を選択して、編集モードに入ります。編集モードに入ると、色が水色に変わりますが、それは選択されたことを示します。+ と -の新しい2つのボタンが現れます 。
。
編集モードでは、以下の体系化オプションが利用可能です:
新しいフォルダの作成
新しいサブフォルダの作成
フォルダまたはサブフォルダの削除
コントローラのフォルダへのコピー
フォルダおよびコントローラの表示順序の変更
編集モードから退出するには:
編集をクリックして、編集モードを終了します。編集 モードから出ると、色が変わり、 +と-のボタンが消えます。
新規フォルダの作成
編集ボタンの左側にある + ボタンを選択します。
または
フォルダー領域のどこでも良いので右クリックし、ショートカット・メニューにあるフォルダーを追加を選択します。
新しいフォルダが作成され、リストに追加されます。
[新しいフォルダ] を選択します。色が水色に変わり、選択されたことを示します。
F2を押し、 フォルダーに名前を付けなおして、エンターを押します。
新しいサブフォルダの作成
フォルダ名の右にある+ ボタンをクリックします。
または
既存のフォルダー上で右クリックし、ショートカットメニューにあるフォルダーを追加を選択します。
新しいフォルダが作成され、リストに追加されます。
[新規フォルダ] を選択します。色が水色に変わり、選択されたことを示します。
F2を押し、 フォルダーに名前を付けなおして、エンターを押します。
フォルダまたはサブフォルダの削除
フォルダ名の右にある- ボタンを選択します。
または
既存のフォルダー上で右クリックし、ショートカットメニューの削除をクリックします。
フォルダは削除され、そして、コントローラのコピーは取り外されます。
サブフォルダを含むフォルダーが削除される場合、全てのサブフォルダ―も削除されます。
コントローラのフォルダへのコピー
全てのコントローラを選択します。または、コントローラリストの上にあるドロップダウン・メニューから、適切なカスタム・セクションを選択します。
コントローラを選択します。色が水色に変わり、選択されていることが示されます。
コントローラは、一つでも複数でも、選択可能です。
Ctrl+ Left click を押し、選択するコントローラーを追加します。
Ctrl+ Left click を押し、一度に選択するコントローラーを複数追加します。
選択したコントローラをコピー先のフォルダにドラッグします。
フォルダおよびコントローラの順序の変更
選択したフォルダまたはコントローラを新しい位置にドラッグします。
スケジュールされたタスク
[システム管理] タブに移動し、[スケジュールされたタスク] を選択します。ワークスペースには、次の情報が表示されます。
を選択します。ワークスペースには、次の情報が表示されます。
列 | 説明 |
|---|---|
チェックボックス | チェックボックスを使用してタスクを選択します。 |
名前 | タスクの種類。 |
最終変更 | 最新の変更のタイムスタンプ。 |
変更者 | タスクの変更者。 |
最新の実行 | タスクが最後に実行された時。 |
動作中 | 現在動作中のタスクの状態情報。 |
コマンド | 説明 |
|---|---|
今すぐ実行 | 1 つ以上のタスクを選択して、設定されているスケジュール日時まで待つことなく、即座に実行を強制します。「今すぐ実行」を動作させるには、バックアップの場所設定が定義されている必要があります。 |
追加 | 新しいタスクを作成します。タスクタイプを選択します。 |
削除 | タスク表から 1 つ以上のタスクを削除します。 |
右側のコントローラのリストには、スケジュールされたタスクによって影響されるコントローラが表示されます。タスクが 1 つ以上選択されている場合にのみ、リストが自動表示されます。
スケジュールされたタスクの管理
システム管理
に移動します。スケジュールされたタスク
に移動します。
既存のタスクをダブルクリックして、構成を表示します。
メニュー | 説明 |
|---|---|
プロパティ | タスクに名前と説明を指定します。 |
スケジュール | タスクの時間と間隔の設定。 |
コントローラ | タスクによって影響されるコントローラを選択します。 |
結果 | タスクの結果。 |
ファイルのインポート | タスクのタイプがコントローラー構成のインポートの場合にのみ表示されます。 |
バックアップの場所 | タスクのタイプがコントローラー構成のエクスポートの場合にのみ表示されます。 |
新しくスケジュールされたタスクの追加
追加を選択します。
スケジュールされたタスクの種類を選択します。
コントローラー構成のエクスポート
コントローラー構成のインポート
データベースメンテナンス
コントローラー構成のプッシュ
ライセンス配布のエクスポート
今すぐ実行
対応するチェックボックスをオンにして、タスクを選択します。
今すぐ実行を選択して、タスクを即座に実行します。
スケジュールされたタスクの削除
該当するチェックボックスを選択タスクを選択し、削除を選択して選択したタスクを削除します。
削除されたタスクは、スケジュールされたタスクのリストから削除されます。
スケジュールされたタスクの編集
編集するタスクをダブルクリックします。
スケジュールされたタスクを編集します。
変更は自動的に保存され、プッシュは必要ありません。
エクスポートとインポートの機能は、コントローラ構成 とコントローラソフトウェアとデータ管理 にもあります。ファイルの形式と結果はどちらも同じです。
コントローラの選択
インポート、エクスポートを有効化し、コントローラ構成タスク・スケジュールを押します。
スケジュールされているタスクを実行するコントローラを選択します。
パラメータ | 説明 |
|---|---|
すべてのコントローラーをスケジュール | はいに設定すると、スケジュールされているタスクは、ToolsTalk 2 に接続され、プラント構造 はいに設定されている場合、コントローラ・リストは見えません。 いいえに設定されている場合、コントローラ・リストは見え、個々の選択が可能です。 |
全てにチェックを入れる | すべてのコントローラに自動的にマークが入り、タスクはすべてのコントローラで実行されます。 個別のコントローラの選択を解除することが可能です。 |
| スケジュールされているタスクを実行するコントローラを選択します。タスクは、選択したコントローラのみに影響します。 |
全てにチェックを入れることとすべてのコントローラーをスケジュールすることとの、重要な違い:
全てにチェックを入れる |
|---|
個別のコントローラが簡単に選択または選択解除できます。 静的リスト。新しいコントローラが追加されても、自動的には含められません。 |
すべてのコントローラーをスケジュール |
|---|
接続されているコントローラの構造の変更は、スケジュールされているタスクを変更しません。 動的リスト、すべてのコントローラに影響します。 |
重要:
インポートが同じインポートファイルを使用して複数のコントローラに行われる場合、コントローラ名フィールドが、インポートされたファイルのコントローラで上書きされます。全てのコントローラが同じ名前を持つ結果になります。
名前が認識されなくなるので、名前の指定されたコントローラで行う、その後のインポートまたはエクスポートは失敗します。
この問題の解決策の 1 つは、すべてのコントローラーをスケジュールするをはいに設定することです。
コントローラー構成のエクスポート
このメニューでは、スケジュールされたタスクの種類がコントローラー構成のエクスポートに表示されます。
パラメータ | 説明 |
|---|---|
バックアップの場所 | エクスポートファイルが書き込まれる場所への有効なパスを入力します。デフォルト値はエラーインジケーター スケジュールされているタスクが実行されるには、パスが有効である必要があります。 |
ファイル名 | エクスポートされるファイルの形式: *.tar.gz 後で構成をコントローラにインポートしたり、デバッグや障害の分析のためにアトラスコプコに送信するために使用できます。 デフォルトのファイル名は、PFExport_<controller-name>_<Date-code>.tar.gz のようになります。 区別するためと固有なファイル名を作成するために、システム変数が使用できます。 |
コントローラー毎のフォルダ | はいに設定すると、各エクスポートは個別のサブフォルダに保存されます。 いいえに設定すると、エクスポートは場所の保存フォルダに保存されます。 |
フォルダ名 | 区別のためと固有なフォルダ名を作成するために、システム変数が使用できます。 |
エクスポートするファイル名とフォルダ名を指定するために、システム変数を使用できます。ファイル名またはフォルダに実行時に追加され、固有なエクスポートファイルまたは場所を作成します。
システム変数はカッコ内に書き込まれ、次が使用できます。
[ControllerName]
[IpAddress]
[ControllerSerialNumber]
テキストとシステム変数を組み合わせることができます。例: Station_3_[ControllerName]_[IpAddress]。コントローラ名が ABC で IP アドレスが 10.25.25.180 の場合、実行時にできるファイル名は Station_3_ABC_10.25.25.180.tar.gz になります。
スケジュールされたファイルのエクスポートは、コントローラがエクスポート時にオンラインで、エクスポートパスが有効である場合にのみ行われます。
パラメータ | 説明 |
|---|---|
有効化 | はいに設定すると、スケジュールされているタスクはスケジュールされている構成に従って実行されます。 いいえ設定すると、スケジュールされているタスクは実行されません。 |
平日 | タスクを実行する平日を 1 つ以上マークします。 |
時間 | ドロップダウンメニューから実行時間を選択します。 |
開始日 | カレンダーアイコンから実行時間の開始日を選択します。 |
終了日の選択 | はいに設定すると、スケジュールされているタスクは、終了日までスケジュールに従って実行されます。 いいえに設定すると、スケジュールされているタスクは、開始日からスケジュールに従って実行されます。 |
タスクの実行後、結果は結果メニューに表示されます。
パラメータ | 説明 |
|---|---|
ステータス | タスク実行後のスケジュールされているタスクの状態は、OK または NOK で示されます。 |
コントローラ | タスクで使用可能な場合に表示されます。 |
最新の実行 | スケジュールされているタスクが実行される日時。 |
エラー | ステータスがNGの場合のエラーコードの例。
|
コントローラー構成のインポート
このメニューでは、スケジュールされたタスクの種類がコントローラー構成のインポートに表示されます。
メニュー項目 | 説明 |
|---|---|
ファイル名 | ファイルと名前は事前にエクスポートされている構成ファイルです。次の形式にします。*.tar.gz |
参照 | このコマンドで、インポートするファイルを検索する参照ウィンドウが開きます。 |
ファイルが ToolsTalk 2に読み込まれ、スケジュールされたタスクがスケジュールされた時間に実行されます。
ファイルのインポートによって、コントローラのプログラムが変更されることはありません。工場出荷時の IP アドレス以外のすべての設定と構成が変更されます。
スケジュールされたファイルのインポートは、コントローラがインポート時にオンラインである場合にのみ行われます。
パラメータ | 説明 |
|---|---|
有効化 | はいに設定すると、スケジュールされているタスクはスケジュールされている構成に従って実行されます。 いいえ設定すると、スケジュールされているタスクは実行されません。 |
平日 | タスクを実行する平日を 1 つ以上マークします。 |
時間 | ドロップダウンメニューから実行時間を選択します。 |
開始日 | カレンダーアイコンから実行時間の開始日を選択します。 |
終了日の選択 | はいに設定すると、スケジュールされているタスクは、終了日までスケジュールに従って実行されます。 いいえに設定すると、スケジュールされているタスクは、開始日からスケジュールに従って実行されます。 |
タスクの実行後、結果は結果メニューに表示されます。
パラメータ | 説明 |
|---|---|
ステータス | タスク実行後のスケジュールされているタスクの状態は、OK または NOK で示されます。 |
コントローラ | タスクで使用可能な場合に表示されます。 |
最新の実行 | スケジュールされているタスクが実行される日時。 |
エラー | ステータスがNGの場合のエラーコードの例。
|
データベースメンテナンス
コントローラー構成、ライブラリ、締め付けプログラム、装置設定、結果などのイベントが、データベースに以前保存されていたイベントに自動的に追加されます。容量を節約し、システムをより効率的にするためにデータベースをクリアするには、履歴データをを削除し、すべてのイベントの最新の結果のみを保持することができます。データベースメンテナンス機能では、すべてのイベントの最新結果の「スナップショット」を撮ることをスケジュールできます。
データのアーカイブ:はいを選択すると、データベースの履歴データを保存(アーカイブ)します。いいえを選択すると、スナップショットを撮るたびに履歴データが削除されます。撮影されたスナップショットの結果は毎回保存されます。
一度に定義できるデータベースメンテナンスタスクタイプのインスタンスは1つのみです。
パラメータ | 説明 |
|---|---|
有効化 | はいに設定すると、スケジュールされているタスクはスケジュールされている構成に従って実行されます。 いいえ設定すると、スケジュールされているタスクは実行されません。 |
平日 | タスクを実行する平日を 1 つ以上マークします。 |
時間 | ドロップダウンメニューから実行時間を選択します。 |
開始日 | カレンダーアイコンから実行時間の開始日を選択します。 |
終了日の選択 | はいに設定すると、スケジュールされているタスクは、終了日までスケジュールに従って実行されます。 いいえに設定すると、スケジュールされているタスクは、開始日からスケジュールに従って実行されます。 |
タスクの実行後、結果は結果メニューに表示されます。
パラメータ | 説明 |
|---|---|
ステータス | タスク実行後のスケジュールされているタスクの状態は、OK または NOK で示されます。 |
コントローラ | タスクで使用可能な場合に表示されます。 |
最新の実行 | スケジュールされているタスクが実行される日時。 |
エラー | ステータスがNGの場合のエラーコードの例。
|
コントローラー構成のプッシュ
スケジュールされたタスクの種類がプッシュ・コントローラ構成に設定されている場合、メニューは目に見えます。
パラメータ | 説明 |
|---|---|
有効化 | はいに設定すると、スケジュールされているタスクはスケジュールされている構成に従って実行されます。 いいえ設定すると、スケジュールされているタスクは実行されません。 |
平日 | タスクを実行する平日を 1 つ以上マークします。 |
時間 | ドロップダウンメニューから実行時間を選択します。 |
開始日 | カレンダーアイコンから実行時間の開始日を選択します。 |
終了日の選択 | はいに設定すると、スケジュールされているタスクは、終了日までスケジュールに従って実行されます。 いいえに設定すると、スケジュールされているタスクは、開始日からスケジュールに従って実行されます。 |
タスクの実行後、結果は結果メニューに表示されます。
パラメータ | 説明 |
|---|---|
ステータス | タスク実行後のスケジュールされているタスクの状態は、OK または NOK で示されます。 |
コントローラ | タスクで使用可能な場合に表示されます。 |
最新の実行 | スケジュールされているタスクが実行される日時。 |
エラー | ステータスがNGの場合のエラーコードの例。
|
バックアップライセンスの配布
このスケジュールされたタスクは、定期的にライセンス配布のバックアップを作成するために使用されます。バックアップはToolsTalk2サーバーに保存され、ToolsTalk 2ライセンスのダウングレードが発生した場合、バックアップを使用して、予約されたライセンスでコントローラーを再度復元できます。
一度に定義できるバックアップライセンス配布タスクタイプのインスタンスは1つだけです。
ライセンス配布のバックアップタスクの設定
プロパティ
名前
バックアップの名を入力します。
説明
バックアップの説明を入力します。
スケジュール
有効化
はいに設定すると、スケジュールされているタスクはスケジュールされている構成に従って実行されます。
いいえ設定すると、スケジュールされているタスクは実行されません。
平日
タスクを実行する平日を 1 つ以上マークします。
時間
ドロップダウンメニューから実行時間を選択します。
開始日
カレンダーアイコンから実行時間の開始日を選択します。
終了日の選択
はいに設定すると、スケジュールされているタスクは、終了日までスケジュールに従って実行されます。
いいえに設定すると、スケジュールされているタスクは、開始日からスケジュールに従って実行されます。
バックアップの場所
ファイル名
バックアップのファイル名を入力します。
結果
ステータス
タスク実行後のスケジュールされているタスクの状態は、OK または NOK で示されます。
最新の実行
スケジュールされているタスクが実行される日時。
エラー
NoWriteAccessToStorage
ExportFailed
TimedOut
バックアップからのライセンス配布の復元
ToolsTalk2 ライセンスのダウングレードが発生した場合、ライセンス配布バックアップを使用して、ライセンス配布をコントローラに再度復元できます。復元は、最初にライセンス配布バックアップをダウンロードし、次にダウンロードしたバックアップをインポートすることによって実行されます。
ライセンス配布バックアップのダウンロード
[システム管理] タブ
を選択し、[スケジュールされたタスク] タブに移動します。ワークスペースで、[ライセンス配布のバックアップ] タスクをダブルクリックします。
[結果] で、復元するライセンス配布の、バックアップのダウンロードを選択します。
[名前を付けて保存]ダイアログで、ダウンロードの場所を参照し、[保存]を選択します。
ライセンス配布バックアップのインポート
ダウンロードしたファイルは、ライセンス配布のインポート機能を使用して、[機能管理システム] タブ からインポートできるようになります。
からインポートできるようになります。
機能管理システム (FMS)
機能管理システムの導入
機能管理システム(FMS)を使用すると、アトラスコプコのお客様は、必要なときに動的なライセンススキームを通じて、必要な追加機能を使用できるようになります。
発注書を受け取った後24 時間以内に、アトラスコプコライセンスポータル(ACLP)のお客様のアカウントに購入された機能が自動的に届きます。これらの機能は、ライセンスファイルとしてダウンロードできます。
(使用許諾契約書に含まれる)この機能ファイルは、デコードされ配布できるローカルライセンスサーバー(LLS)にロードされます。
機能のプールが作成され、複数のコントローラー間で使用できます。所望する機能項目は、必要の際にコントローラーにアップロードでき、必要なくなった場合は、プールに戻すことができます。
アトラスコプコライセンスポータル(ACLP)で、すべての機能のあるアカウントを管理し、ライセンスサーバーへのライセンス付与、ライセンス返却が可能になります。
ACLP における顧客アカウントの作成と管理は、このマニュアルで扱っていません。
機能管理システムの定義
ライセンスの配信 | 機能 |
|---|---|
ローカルライセンスサーバー (LLS) | 機能項目のプールを持ち、機能項目をコントローラのライセンスマネージャに配信できるユニット。 |
アトラスコプコのライセンスポータル (ACLP) | 希望する機能項目すべてを含むライセンスファイルを顧客に送信できるユニット。 |
ライセンス | 機能項目へのアクセス権限。ライセンスは、機能項目の使用方法の条件を示します。 |
ライセンスマネージャ | 機能項目を読み込み、管理し、返すコントローラの機能。 |
バーチャルステーションタイプ | バンドルされた機能の固定コレクションのライセンス。仮想ステーションに全体を割り当てることができます。 |
バーチャルステーション機能 | TurboTight や TrueAngle など、個々のコントローラ機能のライセンス。 |
コントローラ機能 | コントローラ全体の機能 (Step Sync や Soft PLCなど) のライセンス。これらはコントローラごとに割り当てられ、そのコントローラ上の仮想ステーションに限定されません。 |
機能項目 | 追加機能を提供するために、コントローラに読み込むことができるソフトウェアコード。使用条件はライセンス契約に示されています。 |
インテリジェントアプリケーションモジュール (IAM) | すべてのコントローラのプログラム、構成、結果が含まれるストレージモジュール。特定のモジュールは、追加で読み込まれた機能項目も含む場合があります。 |
予約リスト | 配信サーバーには機能項目のプールがあります。その一部は、コントローラに割り当てられ、一部は自由に配信できます。予約リストは、機能項目の配信方法に関する情報を含みます。 |
猶予時間 | ネットワーク接続されている配信環境で適用できます。コントローラは LLS で定期的に確認し、機能項目を予約リストと同期する必要があります。 |
期限切れライセンス | コントローラ構成またはプログラムが変更されている可能性があり、読み込まれた機能項目と予約リストの内容の間に不一致が発生する可能性があります。その場合、コントローラで期限が切れている機能項目が使用されていると、エラーイベントが表示されます。 |
機能ファイル | ACLP からダウンロードされるバイナリファイル。有効なすべての機能項目が含まれます。復号され、サーバーに保存されると、機能項目のプールはコントローラに配信できるようになります。 |
ライセンスの種類と機能の配布の編集
使用可能なライセンスの種類と機能は、コントローラーから追加または削除できます。
システム管理 タブ
を選択します。[機能管理システム] タブ
を選択すると、コントローラのライセンス配布の概要が表示されます。特定のコントローラの 編集ボタン
 を選択します。使用可能なライセンスの種類と機能を示すダイアログウィンドウが開きます。
を選択します。使用可能なライセンスの種類と機能を示すダイアログウィンドウが開きます。各タブを選択して、コントローラで使用できるライセンスタイプまたは機能の数を入力します。
OKを選択して保存し、続行します。
ライセンス配布の管理
ToolsTalk2 サーバーは、最後に成功したライセンス配布状態の内部バックアップを自動的に保存します。このバックアップは、システムからエクスポートできます。
ToolsTalk2ライセンスがダウングレードされた場合で、ホストされているFlexeraライセンスサービスデータベースがリセット(削除)された場合、アトラスコプコのカスタマーライセンスポータル(ACLP)から新しいライセンスファイルを生成し、機能管理システムタブからToolsTalk2にアップロードする必要があります。データベースをリセットすると、ライセンス配布もリセットされるため、復元する必要があります。エクスポート/インポートライセンスの配布を使用して、復元を実行します。
[システム管理] タブ
を選択し、[機能管理システム] タブを選択します。[管理]ボタンを選択し、リストから[ライセンス配布...]を選択します。
エクスポートタブを選択します。
エクスポートする場所を指定し、[エクスポート] を選択します。
ライセンス配布をインポートするには、ライセンスファイルが最初にアップロードされている必要があります。これにより、配布可能なライセンス数がシステムによって認識されます。
[システム管理] タブ
を選択し、[機能管理システム] タブを選択します。[管理]ボタンを選択し、リストから[ライセンス配布...]を選択します。
インポートタブを選択します。
インポートファイルの場所を参照し、[インポート] を選択します。
 警告!この操作により、既存の予約が削除され、ライセンス配布がインポートされたファイルの状態に復元されます。
警告!この操作により、既存の予約が削除され、ライセンス配布がインポートされたファイルの状態に復元されます。
機能項目の配布
機能管理システム(FMS)ワークスペースでは、ユーザーはローカルライセンスサーバー(LLS)に接続されToolsTalk 2 サーバーでオンラインのすべてのコントローラのラインセンスを管理できます。
システム管理 タブ
を選択します。[機能管理システム] タブ
を選択すると、コントローラのライセンス配布の概要が表示されます。
次のビューと情報では、機能ファイルがアトラスコプコから受信され、LLS に読み込まれていることを仮定しています。
ライセンス配布の概要
ライセンス配布の概要は、いくつかのサブタブで構成されています。これらについては以下で説明します。
コントローラ
[コントローラ] サブタブには、コントローラに分散されたライセンス済み機能項目のプールが表示されます。より詳細な概要については、特定の行を選択して展開し、コントローラの現在の機能を表示します。
列 | 機能 |
|---|---|
編集 | コントローラに配布されるライセンスの数を編集します。 |
コントローラ | コントローラに発行された名前。 |
仮想ステーションの種類 | タイプごとの、各コントローラに配布されるライセンスの数量。 |
仮想ステーション機能 | 各仮想ステーションに存在する機能。 |
コントローラ機能 | 各コントローラに存在する機能。 |
仮想ステーションの種類
[仮想ステーションの種類]サブタブには、コントローラ間で分散されているライセンス済み仮想ステーション機能タイプのプールが表示されます。
列 | 機能 |
|---|---|
仮想ステーションの種類 | ライセンスのタイプ。 |
コントローラ名 | コントローラに発行された名前。 |
カウント | コントローラに配布されるライセンス機能タイプの数量。 |
利用可能 | コントローラに配布できるライセンス済み機能タイプの数量。 |
コントローラ上 | ライセンス機能タイプがアクティブになっているコントローラの数。 |
予約済み: | ライセンス機能タイプが予約されているコントローラの数。 ToolsTalk 2からコントローラにライセンスが割り当てられると、割り当てられたライセンスは、ライセンスサーバーでそのコントローラ用に予約されます。コントローラがライセンスサーバに接続して同期すると、ライセンスは [予約済み] と [コントローラオン] の両方の状態になります。 |
合計 | 使用可能なライセンス機能タイプの合計。 |
仮想ステーション機能
[仮想ステーション機能] サブタブには、コントローラ間で分散されたライセンス仮想ステーション機能アイテムのプールが表示されます。
列 | 機能 |
|---|---|
仮想ステーション機能 | 機能の種類 |
コントローラ名 | コントローラに発行された名前。 |
カウント | コントローラに配布されるライセンス済み機能項目の数量。 |
利用可能 | コントローラに配布できるライセンス済み機能項目の数量。 |
コントローラ上 | ライセンス済み機能項目が有効化されているコントローラの数。 |
予約済み: | ライセンス機能タイプが予約されているコントローラの数。 ToolsTalk 2からコントローラにライセンスが割り当てられると、割り当てられたライセンスは、ライセンスサーバーでそのコントローラ用に予約されます。コントローラがライセンスサーバに接続して同期すると、ライセンスは [予約済み] と [コントローラオン] の両方の状態になります。 |
合計 | 使用可能なライセンス済み機能項目の合計数。 |
コントローラ機能
[コントローラ機能] のサブタブには、コントローラ間で配布されるライセンス済みコントローラ機能項目のプールが表示されます。これらはツールライセンスによって規定されます。
列 | 機能 |
|---|---|
コントローラ機能 | 機能の種類 |
コントローラ名 | コントローラに発行された名前。 |
カウント | コントローラに配布されるライセンス済み機能項目の数量。 |
利用可能 | コントローラに配布できるライセンス済み機能項目の数量。 |
コントローラ上 | ライセンス済み機能項目が有効化されているコントローラの数。 |
予約済み: | ライセンス機能タイプが予約されているコントローラの数。 ToolsTalk 2からコントローラにライセンスが割り当てられると、割り当てられたライセンスは、ライセンスサーバーでそのコントローラ用に予約されます。コントローラがライセンスサーバに接続して同期すると、ライセンスは [予約済み] と [コントローラオン] の両方の状態になります。 |
合計 | 使用可能なライセンス済み機能項目の合計数。 |
FMSポータブル
[FMS ポータブル] サブタブには、コントローラ間で分散している FMS ポータブルデバイスの数量が表示されます。
列 | 機能 |
|---|---|
FMSポータブル | FMSポータブルデバイスのID番号。 |
コントローラ名 | コントローラに発行された名前。 |
FMSワークスペースの機能
コマンドボタン
コマンドボタン | 機能 |
|---|---|
管理 |
|
機能ファイルは、ライセンス項目を含むバイナリファイルです。ファイルはアトラスコプコのライセンスポータル (ACLP) で作成され、顧客側でダウンロードされます。配信サーバーに復号されると、機能のプールが作成され、次の 2 通りの方法でコントローラに配信されます。
ToolsTalk 2 ユーザーインターフェースで制御される、機能管理システムサーバーを使用するネットワーク接続されている配信システム。
各コントローラに挿入され、コントローラのユーザーインターフェースで管理される、セキュアな USB フラッシュドライブを使用する手動配信システム。詳細は、コントローラのマニュアルを参照してください。
一般情報
列 | 機能 |
|---|---|
ホスト ID | 機能ファイルが読み込まれる配信サーバーの固有の ID。 |
ToolsTalk2ライセンス | 現在の機能レベルの名称 |
ToolsTalk2 仮想ステーション | 構成済み仮想ステーションの数/構成に使用可能な仮想ステーションの総数 |
ライセンスの種類と機能の配布の編集
使用可能なライセンスの種類と機能は、コントローラーから追加または削除できます。
システム管理 タブ
を選択します。[機能管理システム] タブ
を選択すると、コントローラのライセンス配布の概要が表示されます。特定のコントローラの 編集ボタン
を選択します。使用可能なライセンスの種類と機能を示すダイアログウィンドウが開きます。各タブを選択して、コントローラで使用できるライセンスタイプまたは機能の数を入力します。
OKを選択して保存し、続行します。
構成の比較
比較する構成ファイルをアップロードして、2 つの構成をすばやく比較することができます。ファイルは最初にエクスポートする必要があります。構成のエクスポートは、次のいずれかで行います。
システム管理
セクションの、コントローラソフトウェアとデータ管理 。または
コントローラセクション
。
2 つの構成を比較するには:
システム管理 タブ
に移動して、構成の比較  をクリックします。
をクリックします。参照ボタンを選択して、ファイルを探してアップロードします。
エクスポートされたファイルのファイル名と拡張子は、<Filename>.tar.gz のようになります。
2 つめの参照ボタンを選択して、最初のファイルと比較するファイルを探します。
比較 を選択します。
ワークスペースに、選択した 2 つの構成のパラメータのリストが表示されます。両方の構成で同一のパラメータは表示されますが、ハイライト表示はされません。他方のファイルと比較して異なるパラメータは黄色でハイライト表示されます。
ユーザーグループ
ユーザーグループの概要
この機能は、ToolsTalk 2 で管理者のユーザー権限を持つユーザーにのみ表示されます。
ToolsTalk 2 のユーザーグループ機能は、次の機能を提供します。
ユーザーグループの作成または削除。
フォルダとコントローラへのユーザーアクセス権限の割り当て。
コントローラ構成とパラメータ設定を変更するためのユーザー権限の割り当て。
ライブラリ機能を複数のコントローラと ToolsTalk 2 管理タスクに配信するためのユーザー権限の割り当て。
ユーザーグループを表示するには:
左のメニューバーでシステム管理
を選択します。上のメニューバーでユーザーグループ
 を選択します。
を選択します。
ワークスペースの表の各行は、異なるユーザー権限を指定できるユーザーグループを表します。
列には、左から右に、次の見出しがあります。
列 | 説明 |
|---|---|
チェックボックス | ユーザーグループの選択または選択解除。 |
名前 | ユーザーグループの名前。 |
説明 | オプションのフィールド。 |
AD グループ | Active Directory グループ名。IT 部門によって作成されます。 |
| 実際の列ではありません。 構成のリストは、昇順または降順のアルファベット、数字、時間の順番に並べ替えることができます。表見出し行をクリックして矢印を表示させ、矢印をクリックして現在の並べ替え順を変更します。一度に 1 つの矢印が表示されます。 |
表の一番上の行には管理者という名前が指定されています。このユーザーグループは削除できません。
コマンド | 説明 |
|---|---|
追加 | 新しいユーザーグループを作成します。ダイアログウィンドウが開きます。 |
Delete (削除) | グループ表から 1 つ以上のユーザーグループを削除します。 |
ユーザーグループの前提条件
ToolsTalk 2 では複数のユーザーグループを作成できます。各ユーザーグループに、ToolsTalk 2 でパラメータ、構成、フォルダを作成、読み取り、更新、削除するための異なるユーザー権限を指定できます。
会社の IT 分門のネットワーク管理者が 1 つ以上の Active Directory (AD) グループを作成する必要があります。AD グループは ToolsTalk 2 の 1 つのユーザーグループに割り当てることができます。ToolsTalk 2の各ユーザーグループには、固有のユーザー権限のセットが指定できます。
そのため、 ToolsTalk 2ユーザー権限のそれぞれの組み合わせに、1 つの AD グループを作成する必要があります。個別のユーザーは 1 つ以上の AD グループに割り当てられます。ユーザーグループのすべてのメンバーは、ToolsTalk 2 の同じユーザー権限を持ちます。
例えば、次の 4 つのグループを作成します。
-
ライン 1 のオペレーター。
-
ライン 1 のラインマネージャ。
-
工場生産エンジニア。
-
製品品質マネージャ。
個々のユーザーは 1 つ以上のグループに割り当てられます。
ToolsTalk 2 に 4 つのユーザーグループも作成します (同じグループ名を使用)。各ユーザーグループに 1 つの AD グループが割り当てられます。次のユーザー権限を作成します。
-
ライン 1 のオペレーター: ライン 1 からの締め付け結果のみを見ることができ、構成パラメータは変更できません。
-
ライン 1 のラインマネージャ: すべてのコントローラを見ることができ、ライン 1 のコントローラの構成パラメータを変更する追加のユーザー権限を持ちます。
-
工場生産エンジニア: ライン 1 とライン 2 の構成パラメータを変更できますが、すべての締め付け結果を見ることはできません。
-
製品品質マネージャ: 工場全体のすべての締め付け結果とイベントログを見ることができます。
ユーザーグループの作成、削除、編集
左のメニューバーでシステム管理アイコン
を選択します。上のメニューバーでユーザーグループアイコン
を選択します。ワークスペースウィンドウにユーザーグループの表が表示されます。
ユーザーグループを削除するには、チェックボックスを選択し
、削除をクリックします。ユーザーグループのユーザー権限を編集するには、表の行をダブルクリックします。ワークスペースに構成メニューが表示されます。
新しいユーザーグループを追加するには、追加をクリックします。グループの作成ポップアップウィンドウが表示され、次のパラメータを入力する必要があります。
ユーザーグループの名前。
オプションのユーザーグループの説明。
既存の AD グループの名前。
追加を選択して保存して、ウィンドウを閉じます。
ワークスペースウィンドウにユーザーグループの更新された表が表示されます。
列 | 説明 |
|---|---|
名前 | ユーザーグループのToolsTalk 2名。 |
説明 | オプションの情報フィールド。 |
AD グループ | Active Directory グループ名で、IT 部門で作成されます。ToolsTalk 2サーバーにアクセスするためのユーザー権限が必要な個別のユーザーを含みます。 |
有効 はい/いいえ | スーパー管理者の資格情報に対してのみ有効です。 この機能は、ユーザーグループを削除するのではなく、ダウングレード中にユーザーグループを無効にします。
アップグレード後に [有効] が [はい] に設定されていない場合、そのグループ内の特定のユーザーに対してクライアントは起動せず、「アプリケーションへのアクセス権がありません」という警告が表示されます。 |
ユーザーグループの権限メニュー
左のメニューバーでシステム管理アイコン
を選択します。上のメニューバーでユーザーグループアイコン
を選択します。ワークスペースウィンドウにユーザーグループの表が表示されます。
表の行の 1 つをダブルクリックして、ユーザーグループを編集可能にします。
グループ権限メニューには、ユーザー権限を設定する 3 つのタブがあります。
列 | 説明 |
|---|---|
フォルダ | プラント構造のフォルダにアクセスし、変更するユーザー権限を割り当てます。 |
コントローラ | 選択したフォルダのコントローラにアクセスし、変更するユーザー権限を割り当てます。 |
グローバル機能 | ToolsTalk 2 のシステム管理者タスクとグローバルライブラリ機能を行うユーザー権限を割り当てます。 |
フォルダタブを選択し、ユーザーグループがアクセスできるフォルダを選択します。
フォルダが表示されていない場合、フォルダに含まれるコントローラにはアクセスできません。
コントローラタブを選択して、グループのコントローラに対するユーザー権限を選択します。
コントローラが表示されている場合、すべての構成とパラメータを読み取ることができます。
グローバル機能タブを選択し、ユーザーグループがアクセスできる ToolsTalk 2 のグローバル機能を選択します。
フォルダーのユーザー権限
ユーザー権限の最初のステップは、プラント構造 内のアクセスできるフォルダを割り当てることです。
左のメニューバーでシステム管理アイコン
を選択します。上のメニューバーでユーザーグループアイコン
を選択します。ワークスペースウィンドウにユーザーグループの表が表示されます。
表の行の 1 つをダブルクリックして、編集用のメニューを表示します。
グループ権限メニューで必要なタブをクリックします。
選択したユーザーグループに必要なユーザー権限を設定します。選択されたチェックボックス
は有効な機能を示します。可能性のある組み合わせが表に説明されます。
変更内容は自動的に保存されます。
プラント構造にはすべてのコントローラという名前のフォルダがあります。このフォルダには、ToolsTalk 2 サーバーに接続されているすべてのコントローラがあります。
カスタマイズされているフォルダとサブフォルダを作成して、見やすくしたり、コントローラを論理的にグループ分けすることができます。
パラメータ | 説明 | 状態 |
|---|---|---|
すべてのフォルダで同じ権限 | ラジオボタン マークすると、選択されたユーザー権がプラント構造のすべてのフォルダ (新しいフォルダを含む) に適用可能になります。 | マークしない場合: プラント構造が変更されると、特定のフォルダのユーザー権限を更新する必要が生じる場合があります。 |
各フォルダに手動で権限を設定 | マークすると、選択されたユーザー権限がプラント構造の選択したフォルダのみに適用可能になります。 | |
読む | チェックボックス ユーザーグループはフォルダとその内容を見ることができます。 | マークしない場合: フォルダとその内容が、ユーザーグループに表示されません。 |
更新 | チェックボックス ユーザーグループは、コントローラとフォルダの間で移動、コピー、削除できます。 | |
作成 & 削除 | チェックボックス フォルダの作成 & 削除権限があると、ユーザーはフォルダ内にサブフォルダを作成し、削除できます。 すべてのコントローラフォルダの作成 & 削除権限があると、ユーザーは ToolsTalk 2 からコントローラを削除することもできます。 すべてのフォルダの作成 & 削除権限 (新しいフォルダを含む) があると、ユーザーは主要なフォルダを削除することもできます。 |
ユーザー権限のマークされていないフォルダは、プラント構造 のユーザーグループには表示されません。
フォルダの最小ユーザー権限は読み取りです。このレベルでは、フォルダが表示され、そのサブフォルダの内容とコントローラも表示されます。
コントローラが表示されている場合、少なくともその構成とパラメータを読み取ることができます。ユーザーグループに追加のユーザー権限を割り当てることができます。
コントローラのユーザー権限
ユーザー権限の 2 番目のステップは、プラント構造 でアクセス可能な選択されたコントローラに対するグループの権限を割り当てることです。
コントローラが表示されている場合、構成とパラメータを読み取ることができます。ユーザーグループに追加のユーザー権限を割り当てることができます。
左のメニューバーでシステム管理アイコン
を選択します。上のメニューバーでユーザーグループアイコン
を選択します。ワークスペースウィンドウにユーザーグループの表が表示されます。
表の行の 1 つをダブルクリックして、編集用のメニューを表示します。
グループ権限メニューで必要なタブをクリックします。
選択したユーザーグループに必要なユーザー権限を設定します。選択されたチェックボックス
は有効な機能を示します。可能性のある組み合わせが表に説明されます。
変更内容は自動的に保存されます。
パラメータ | 説明 | 状態 |
|---|---|---|
すべてのコントローラーで同じ権限(新しいコントローラーを含む) | ラジオボタン マークすると、選択されたユーザー権限がプラント構造のすべての表示されるコントローラ (新しいコントローラを含む) に適用可能になります。 | マークしない場合: 新しいコントローラが追加される場合など、プラント構造が変更されると、そのコントローラのユーザー権限を更新する必要があります。 |
各コントローラーに手動で権限を設定 | ラジオボタン マークすると、選択されたユーザー権限がプラント構造の選択したコントローラのみに適用可能になります。 | |
更新 | チェックボックス ユーザーグループのメンバーは、次が可能です。
| |
作成 & 削除 | チェックボックス 作成 & 削除ユーザーグループのメンバーの権限:
| |
| フォルダを開き、コンテンツを表示。 | |
 | フォルダを閉じ、コンテンツを非表示。 | |
(X/Y) | マークされているフォルダの合計 Y 個のコントローラのうち、X 個のコントローラが選択されている権限を持つ |
ユーザー権限のマークされていないフォルダは、プラント構造 のユーザーグループには表示されません。
フォルダの最小ユーザー権限は読み取りです。このレベルでは、フォルダが表示され、そのサブフォルダの内容とコントローラも表示されます。
コントローラが表示されている場合、少なくともその構成とパラメータを読み取ることができます。ユーザーグループに追加のユーザー権限を割り当てることができます。
グローバル関数のユーザー権限
ユーザー権限の 3 番目のステップは、ToolsTalk 2のアクセスできるグローバル機能を割り当てることです。
左のメニューバーでシステム管理アイコン
を選択します。上のメニューバーでユーザーグループアイコン
を選択します。ワークスペースウィンドウにユーザーグループの表が表示されます。
表の行の 1 つをダブルクリックして、編集用のメニューを表示します。
グループ権限メニューで必要なタブをクリックします。
選択したユーザーグループに必要なユーザー権限を設定します。選択されたチェックボックス
は有効な機能を示します。可能性のある組み合わせが表に説明されます。
変更内容は自動的に保存されます。
ユーザーグループにコントローラの作成 & 削除ユーザー権限レベルがある場合、すべてのコントローラ構成を作成し、編集することができます。
グローバル機能は ToolsTalk 2 の管理機能とライブラリ機能のグループで、左側のメニューにアイコンがあります。ユーザーグループには、グローバル機能の異なるユーザー権限を指定できます。
ある機能にユーザー権限が許可されていない場合、その機能にはユーザーはアクセスできず、アイコンはユーザーには表示されません。
機能 | 選択 | 説明 |
|---|---|---|
グローバル機能: レポート  | ||
結果  | 有効化 | マークすると、選択したコントローラの結果ワークスペースがユーザーグループに表示されます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
イベント | 有効化 | マークすると、選択したコントローラのイベントワークスペースがユーザーグループに表示されます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
機能 | 選択 | 説明 |
|---|---|---|
グローバル機能: システム管理  | ||
エクスポートとインポートのスケジュール | 有効化 | マークすると、ユーザーグループは、構成とパラメータのエクスポートとインポートをスケジュールするパラメータを表示し、構成することができます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
コントローラソフトウェアとデータ管理 | 有効化 | マークすると、ユーザーグループは、選択したコントローラのソフトウェア更新を表示し、構成できます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
機能管理システム | 有効化 | マークすると、ユーザーグループはライセンスされた機能を管理し、選択されたコントローラからの機能の読み込みと削除ができます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
ユーザーグループ管理 | 有効化 | マークすると、ユーザーグループは、ユーザーグループのユーザー権限の表示と構成ができます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
プログラムの承認
| 有効化 | マークされている場合、ユーザーグループは承認のためにプログラムを送信したり、プログラムを承認または拒否したりできます。 マークされていない場合、アイコンはToolsTalk 2に表示されません。 |
機能 | 選択 | 説明 |
|---|---|---|
グローバル機能: ライブラリ  | ||
コントローラ構成ライブラリ プログラムライブラリ 構成ライブラリ フィールドバスライブラリ | 読む | マークすると、ユーザーグループは、ライブラリのパラメータの表示と構成ができます。 マークしない場合、アイコンはToolsTalk 2に表示されません |
コントローラ構成ライブラリ プログラムライブラリ 構成ライブラリ フィールドバスライブラリ | 更新 | マークすると、ユーザーグループは、ライブラリのパラメータの表示と編集ができます。ライブラリに登録しているコントローラは、自動的に更新されます。 |
コントローラ構成ライブラリ プログラムライブラリ 構成ライブラリ フィールドバスライブラリ | 作成 & 削除 | マークすると、ユーザーグループは、ライブラリの構成の作成、編集、削除ができます。ライブラリに登録しているコントローラは、自動的に更新されます。 |
コントローラ構成ライブラリ プログラムライブラリ 構成ライブラリ フィールドバスライブラリ | 分配 | マークすると、ユーザーグループは、ライブラリの構成の作成、編集、削除ができます。ライブラリに登録しているコントローラは、自動的に更新されます。 また、配信ユーザー権限のあるユーザーグループは、ライブラリ構成に登録されていないコントローラにグローバル構成を配信できます。 グローバル構成は、該当するコントローラで作成されます。 |
プログラムの承認
このセクションでは、プログラムの締め付けまたは緩めの承認プロセスについて説明します。プログラムの承認は、承認特権を持つユーザーによって管理され、Power Focus 6000、PF6 FlexSystem、およびStepSyncコントローラーに適用されます。
承認のためのプログラムの送信
プラント構造ワークスペース
でコントローラを選択します。ツールバーで、締め付けプログラム
を選択します。締め付けプログラムの概要に、締め付けプログラムのリストが表示されます。
承認のために送信する必要があるプログラムのチェックボックスをオンにします。
承認のために送信できるのは、コントローラにプッシュされたプログラムのみです。
[管理] を選択し、[承認のために送信] を選択します。
これで、プログラムが [プログラムの承認] タブ
 に表示され、承認または却下される準備が整いました。
に表示され、承認または却下される準備が整いました。
締め付けプログラムをコピーして貼り付けると、承認ステータスはコピーされません。コピーされたプログラムのステータスは未定義になります。
プログラム承認ワークスペース
システム管理
に移動して、プログラムの承認 を選択します。プログラム承認の概要には、プログラムの承認が保留されているコントローラのリストが表示されます。
展開するコントローラを選択し、プログラムの一覧を表示します。
列 | 説明 |
|---|---|
チェックボックス | チェックボックスをオンにして、プログラムを選択します。 |
名前 | 締め付けまたは緩めプログラムの名前。 |
最終変更 | ToolsTalk 2時間で表される最終変更。 |
変更者 | どのユーザーが最後に変更を加えたかを示します。 |
最終承認 | コントローラー時間で表される、プログラムに対する最後の承認。 |
最終承認者 | プログラムを最後に承認したユーザーを示します。 |
承認ステータス | プログラムの承認ステータス。 |
承認ステータス
ステータス | 説明 |
|---|---|
未定義 | ToolsTalk 2ソフトウェアおよびコントローラーで作成されたすべての新しいプログラムのステータスは未定義となります。 |
承認待ち | プログラムは承認のために送信済みです。 |
承認済み | このプログラムは承認されており、コントローラーで使用できます。 |
未承認 | プログラムは変更中/最適化中。確定後、プログラムは承認のために送信できます。 |
拒否済み | プログラムは承認者によって拒否され、修正が必要です。 |
すべてのプログラムは、承認ステータスに関係なく使用できます。承認ステータスは、プログラムの動作機能に影響を及ぼしません。
プログラムが承認ワークフローに入ると、ステータスが必ず設定されます。承認のために送信されたことがないプログラムのみがステータス 「未定義」 となります。
プログラムの承認または拒否
プログラム承認のユーザー権限を持つユーザーのみが、承認のために送信されたプログラムを承認または却下できます。この機能は、ライセンスレベルのラインマネージャーでのみ使用できます。
システム管理
に移動して、プログラムの承認 を選択します。プログラム承認の概要には、プログラムの承認が保留されているコントローラのリストが表示されます。
展開するコントローラを選択し、プログラムの一覧を表示します。
承認/拒否するプログラムのチェックボックスをオンにします。
[管理]を選択し、[承認]または[拒否]を選択します。
構成変更プッシュ配信の使用
ToolsTalk 2 には、ToolsTalk 2サーバーに接続されている各コントローラのミラーリングされたデータがあります。コントローラまたは Web インターフェースでの最初の接続時、再接続時、または構成時に、データはコントローラから ToolsTalk 2 に自動的にコピーされます。
データは、ToolsTalk 2からコントローラへ自動的に送信されません。変更を適用するには、オペレーターがデータをコントローラにプッシュする必要があります。
オフラインのコントローラは、ToolsTalk 2 アプリケーションによって構成設定またはパラメータ値が変更でき、データは保存され、後でプッシュできます。
ToolsTalk 2 で構成設定が変更されると、構造リストのコントローラ名の横と、変更されている締め付けプログラムの横にプッシュインジケーター が表示されます。
コントローラがオンラインかオフラインかに関係なく、構成は ToolsTalk 2 インターフェースで作成できます。
構成は、オンライン状態のコントローラのみにプッシュできます。コントローラがオフラインの場合、コマンドは無視されます。
プッシュは複数のコントローラに同時に行うことができます。
プッシュコマンドが正しく実行されると同時に、インジケーター
が消えます。
コントローラへの構成のプッシュ
変更をコントローラにプッシュ配信する方法はいくつかあります。
コントローラーリストのコントローラー名の横にあるプッシュ配信インジケーターアイコン
を選択します。
タブメニューの 管理 ボタンを選択し、ドロップダウンリストから 変更のプッシュ配信を選択します。
上部の情報バーの 変更のプッシュ配信ボタンを選択します。
選択すると、プッシュ配信するコントローラ ダイアログウィンドウが表示されます。
次のような、構成をプッシュする方法があります:

A
すべての設定を一度にプッシュするには、このチェックボックスをオンにします。これは、リストの全コントローラに適用されます。
B
選択したコントローラのすべての構成がプッシュされます。該当するチェックボックスにマークを付けてコントローラを選択します。
C
コントローラの構成リストを展開して、プッシュする構成を手動で選択します。残りの構成は、選択した構成のプッシュ後リストに残ります。
プッシュコマンドボタン(D)を選択します。
[キャンセル]を選択するか、ウィンドウを閉じて終了します。
コントローラ構成を元に戻す
ToolsTalk 2 アプリケーションへの変更は、自動的に保存されます。プッシュ記号 は、コントローラに変更が加えられているが、まだプッシュされていないことを示します。
[管理] ボタンを選択し、続いてドロップダウンメニューから [元に戻す] を選択します。
[コントローラを元に戻す]警告 ダイアログで、[OK] を選択してコントローラ設定を元に戻すか、または [キャンセル] を選択して元に戻すプロセスをキャンセルします。
元に戻す操作では、選択したコントローラの ToolsTalk 2 に保存されているすべての構成が削除されます。また、選択したコントローラのブロックも削除します。コントローラまたは Web インターフェースで行った変更は、通常通りデータベースにコピーされます。
レポート
このセクションでは、使用可能なレポートについて学習できます。
結果とイベント
ToolsTalk 2では、コントローラ GUI の小さな画面より詳細な締め付け結果を表示できます。
コントローラからの締め付け結果は、締め付けが終了すると同時にコントローラから ToolsTalk 2に自動的に送信されます。
コントローラには、締め付け結果をさらに処理し、統計分析するために ToolsNet 8 に送信するオプションもあります。
ToolsTalk 2 では、結果を表示して、一度に 1 つのコントローラからレポートを作成できます。各タスクは 1 つの結果として表示されます。単一の締め付けには、主要なパラメータを示す表、または締め付けグラフに結果が表示されます。バッチシーケンスは、実行された順番に個別の締め付けをすべて示します。
統計分析、結果のフィルタリング、締め付け分析は、ToolsNet 8 を使用して実行できます。この詳細については、ToolsNet 8 のマニュアルを参照してください。
アイコン | 説明 |
|---|---|
 | ワークスペースエリアに、選択されたコントローラの締め付け結果が表示されます。結果は表形式またはグラフィカルトレースで表示されます。 |
 | コントローライベントは、設定 |
[結果]タブでの作業
締め付け結果は、さらに分析するために個別またはまとめて選択できる縮小版リストに表示されます。
NG ステータスの結果のみを表示するには、各ページの下部で NG 結果のみ表示を選択します。
締め付け結果
GUIパーツ | 説明 |
|---|---|
ピンを押さえる | 固定ピンアイコンを選択して、結果をピン留めタブに固定します。 |
トレースアイコン | トレースアイコンを選択して、 トレースワークスペースに結果のグラフィック表示を表示します。 |
保存アイコン | このコマンドは、結果データを含む zip ファイルを作成します。指定する場所でファイルを保存するためのポップアップダイアログウィンドウが開きます。 |
シャント校正 | シャント校正が表示されている場合に表示されます。 |
全体的なステータス | 締め付けの合計ステータス、OK または NG。 |
タイプ | |
仮想ステーション名 | 仮想ステーションの名前。 |
Sync Modeのインデックスと名前 | 締め付けに使用されるSync Modeのインデックスと名前。 |
タイムスタンプ | 時間と日付の締め付けのタイムスタンプ。 |

チャンネル結果
各チャンネルについて、全体的な結果が次の内容で報告されます。
GUIパーツ | 説明 |
|---|---|
トレース | トレースアイコンを選択して、 トレースワークスペースに結果のグラフィック表示を表示します。 |
保存 | このコマンドは、結果データを含む csv ファイルを作成します。指定する場所でファイルを保存するためのポップアップダイアログウィンドウが開きます。 |
ボルト名 | ボルトの番号と名前。Sync Mode >「Sync Mode名」> ボルトの構成 > ボルトとボルト名 で設定します。 |
ステータス | 締め付けの合計ステータス、OK または NG。 |
マルチステップ名 | 締め付けプログラムの名前。締め付けとマルチステッププログラム >「締め付けプログラム名」> 基本設定 > 名前 で設定します。 |
チャンネル | チャネル番号。 |
目標角度 | [目標角度] には、締め付け方法用に構成された [目標角度] の値が表示されます。この値は、締め付けを実行するために使用されます。 |
最終角度 | 最後の締め付けステップの実際の測定角度です。この角度は、このパラメータを報告する最後の締め付けステップにあるステップモニタのピーク角度です。 |
最終トルク | 締め付けのための最終トルク。このパラメータを報告するのは、最後の締め付けステップにあるステップモニタのピークトルク です。 |
目標トルク | 目標トルク。 |
経過時間 | 締め付けの開始から終了までの時間。 |
シャント校正 | シャント校正データを表示するには、このアイコンを選択します。 |
ステップ結果
マルチステップ締め付けプログラムの各ステップはデータを報告します。このほとんどは、ステップ中に有効なモニターと制限からのデータなので、正しいタイプのモニターまたは制限が構成されている場合にのみデータが報告されます。
ステップ結果パラメータ | 説明 |
|---|---|
ステップ | ステップ数。 |
ステータス | ステップのステータス、OK または NG。 |
ステップタイプ | マルチステッププログラムのステップタイプ。 |
パス | プログラム内のどこにステップがあるかを示します。つまり、ステップが締め付けパス、修復、または中止パスのいずれにあるかを示します。 |
ピークトルク (Nm) | 内部破断時に発生するトルクを含む測定された最終トルク。通常、ピークトルクはシャットオフトルクよりも高くなります。 |
経過時間 | 締め付けの開始から終了までの時間。 |
角度 |
|
結果レポーター
リストには、結果レポーターから得られた値が表示されます。プログラムのモニター/制限に対して定義された結果レポーターがある場合、そのモニター/制限からの値が報告されます。プログラムモニター/制限に対して定義された結果レポーターがない場合、メインパスで最後に実行された結果レポーターからの値が報告されます。
同じタイプの複数のレポーターがプログラムで定義されている場合の評価順序:
プログラムモニター/プログラム制限に関する結果レポーター。
メインパスで最後に実行されたステップの監視/制限に関する結果レポーター。
対応する結果レポーターによって設定されたマルチステップ結果の最高レベルの値:
結果レポーターの最終角度によって設定された最終角度
結果レポーター最終トルクによって設定された最終トルク
結果レポーター電流によって設定された電流
トレース
結果で、有効になっている場合はトレースアイコンをクリックします。 。次に結果グラフが表示されます。複数のトレースを選択して、同時に表示できます。
。次に結果グラフが表示されます。複数のトレースを選択して、同時に表示できます。
トレース ワークスペースには、1 つ以上の締め付け結果の詳細なグラフィック情報が表示されます。
ワークスペースで、マウスホイールを使用して拡大または縮小します。ズームインするエリアを選択することもできます。トレース領域をダブルクリックして戻ります。
例:
拡大する領域の選択:
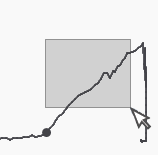
トレースを移動するには、マウスのホイールボタンを押します。

トレースグラフでは、選択した軸タイプに基づくデルタ情報を表示できます。比較する 2 つの点を右クリックして、それらの間のデルタを表示します。ポイントをドラッグしてターゲットを変更します。
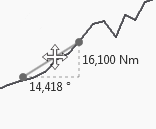
デルタをドラッグして移動するか、削除キーを押して削除します。
トレース設定/プリファレンス | 説明 |
|---|---|
制限の表示 | 1つの曲線が表示されている場合、このボックスをオンにすると、締め付けプログラムで使用されている場合は限界値を表示できます。 |
最小/最大の表示 | 最小または最大の測定値を表示します。 |
ピーク同期 | 異なる曲線が同じように見える場合がありますが、グラフでは配置が異なります。 このオプションでは、曲線のオーバーレイを作成し、ピーク値を同期します。 |
| X軸| | X 軸の絶対値を表示します。 |
Y1 | Y1 軸に表示する情報を選択します。
|
Y2 | Y2 軸に表示する情報を選択します。
|
Y3 | Y3 軸に表示する情報を選択します。
|
X | どの情報をX軸に表示するかを選択します。
|
すべてのΔを削除 | すべてのデルタを削除します。 |
保存... | このコマンドでは、グラフィックエリアの画像を作成します。指定する場所でファイルを保存するためのポップアップダイアログウィンドウが開きます。デフォルトのファイル名は export.png です。 |
すべて削除 | このボタンはトレースプロットエリアをクリアします。 トレースは結果に残り、「有効な結果」ワークスペースで再度アクセスできます。 |
シャント較正
結果のシャント校正アイコン
 をクリックして、シャント校正パラメータを取得します。
をクリックして、シャント校正パラメータを取得します。
締め付けの前に、各ツールはシャント校正とゼロオフセット補償を行います。
|
|
|---|---|
マルチステップ名 | ツールが実行する締め付けプログラムの名前。 |
ゲイン | 測定されたゼロトルクに対する相対値。 |
ゲインの差 | 以前の校正と比較した利得差。 |
ゲインの上限 | 測定されたゼロトルクに対する上限。 |
ゲインの下限 | 測定されたゼロトルクに対する下限。 |
ゲイン最大変化 | 前回のキャリブレーションと比べてゲインの変化を許容する最大量。 |
オフセット | 理想ゼロトルクに対する符号付きオフセット。 |
オフセットの差 | 前回の校正と比較したオフセット差。 |
オフセットの上限 | 理想ゼロトルクに対する上限。 |
オフセットの下限 | 理想ゼロトルクに対する下限。 |
オフセットの下限 | 理想ゼロトルクに対する下限。 |
オフセット最大変更 | 前回のキャリブレーションと比較してオフセット変化が許容される最大量。 |
シャント失敗 | [真] または [偽]。 |
ゼロオフセット失敗 | [真] または [偽]。 |
固定 - 調査のための保持エリア
締め付け結果は固定エリアに一時的に保存されます。締め付けの詳細な分析に便利で、新しい結果の受信時に締め付け結果がウィンドウから欠落することを回避できます。
手動:結果上でピンアイコン
 を選択します。
を選択します。締め付け結果は、調査のために固定エリアにコピーされます。一時記憶には複数の結果を固定できます。
自動:自動 PIN ドロップダウンメニューを選択して、固定する結果数を入力します。開始 を選択します。次の受信結果が自動的に固定され、入力された数に達するか、停止が押されるまで継続されます。
固定エリアからのすべての結果の削除
個別の結果を削除するには、ピンアイコン を選択して固定を解除します。
ライブ結果
タスクが完了すると同時に、コントローラは ToolsTalk 2 に締め付け結果を送信し、結果が有効な結果の上部に追加されます。限定数の結果が保存できます。リストがいっぱいになると、最も古い結果がリストからなくなります。
最上位レベルでは、複数のチャンネルを使用した同期締め付けの結果には、次の情報が含まれます。
GUIパーツ | 説明 |
|---|---|
赤のバー | ライブ結果 テーブルの一番左の場所が赤いバー のアイコンになっていることがあります。それは、 |
ピンを押さえる | 固定ピンアイコンを選択して、結果をピン留めタブに固定します。 |
保存アイコン | このコマンドは、結果データを含む .csv ファイルを作成します。ダイアログウィンドウが開き、ファイルを目的の場所に保存します。 |
トレースアイコン | トレースアイコンを選択して、 トレースワークスペースに結果のグラフィック表示を表示します。 |
全体的なステータス | OK または NG。 NG は常に赤のバーアイコンと組み合わされ、エラーのある締め付けをすばやく確認できます。 |
仮想ステーション名 | 仮想ステーションの名前。 |
Sync Modeのインデックスと名前 | 締め付けに使用されるSync Modeのインデックスと名前。 |
タイムスタンプ | 時間と日付の締め付けのタイムスタンプ。 |
 エラーの迅速な識別に関する誤った締め付けであることを示しています。これは NG を示します。
エラーの迅速な識別に関する誤った締め付けであることを示しています。これは NG を示します。[イベント]タブの使用
コントローライベントを表示するには:
プラント構造
でコントローラを選択します。 イベント
に移動します。
ワークスペースエリアに、選択されたコントローラからのイベントが表示されます。イベントは、コントローラの動作状態の変化です。
コントローラがオンラインの場合、コントローラごとに最大1024の最新の受信イベントを ToolsTalk 2 データベースに格納できます。ただし、コントローラがオフラインの場合は、その間に発生した最新10件の結果が保存され、コントローラがオンラインになるとToolsTalk 2に転送されます。
結果パラメータ | 説明 |
|---|---|
重要度 | 記号として表示されます。 |
Date and time (日時) | 設定時間としてコントローラに表示されます。 |
コード | イベントコード番号。 |
説明 | イベントの説明。 |
詳細 | イベントに関するより詳細な情報。 |
仮想ステーション | バーチャルステーション名 |
グループ | コントローラ、ドライブ、ツール、またはキャリア。 |
チャンネル | イベントがトリガされたチャンネル。 |
キャリア | キャリア番号。 |
Serial number (シリアル番号) | デバイスのシリアル番号。 |
記号 | 説明 |
|---|---|
 | イベントタイプがエラー。 |
 | イベントタイプが警告。 |
 | イベントタイプが情報。 |
重大度のタイプ
イベントは、情報、警告、エラーの 3 つのカテゴリに分類されます。
情報イベント
情報イベント は、ユーザーまたはシステムによって実行されたアクションで発生した注意すべきイベントを通知します。情報イベントは、特定のユーザーアクションを必要としません。
は、ユーザーまたはシステムによって実行されたアクションで発生した注意すべきイベントを通知します。情報イベントは、特定のユーザーアクションを必要としません。
警告イベント
警告イベント は、システムのパフォーマンスに影響を与えるか、損傷を招く可能性のある潜在的に深刻な状態を知らせます。
は、システムのパフォーマンスに影響を与えるか、損傷を招く可能性のある潜在的に深刻な状態を知らせます。
エラーイベント
エラーイベントは、継続するために、ユーザーがセットアップや構成を変更する必要がほぼ全面的ある、サービス障害のような深刻な状態を知らせます。
コントローライベント通知の追加
このセクションでは、さまざまなコントローライベントの通知を有効にする方法について説明します。特定のコントローライベントの通知を受信する場合は、 [設定]メニューの[イベント]サブタブで、それらのイベントの[ログ]と[表示]チェックボックスをオンにする必要があります。
ワークスペース の右上隅にある
を選択します。[ToolsTalk 2ユーザー設定]ダイアログボックスで、すべての通知をオフにするか、次の通知を有効にするかを選択できます:
すべて表示
エラーと警告を表示
エラーのみを表示
[保存]して[閉じる]を選択します。
設定/イベントメニューで有効になっている(ログと表示のボックスがチェックされている状態)コントローライベント、およびToolsTalk 2ユーザー設定で選択された値(エラー、警告、またはその両方)に基づいて、接続されているコントローラから受信したすべてのイベントはコントローライベント通知ウィンドウで、それらを受信する都度表示されます。
リストでコントローラを選択して展開し、そのコントローラに関連するすべての通知を表示します。
各通知には、次の値が記載されています:
アイテム
説明
重要度
重要度はアイコンによって識別されます:
- - エラー
- - 警告
- - 情報
コード
イベントコード ID。
説明
イベントコードの説明。
日時
コントローラ時間で表される、イベント発生時のタイムスタンプ。
グループ
システムの説明。
トラブルシューティングおよびサービス
このセクションでは、問題が発生した場合のトラブルシューティングを支援し、製品の保守とサービスに役立つ情報を提供します。
インストール中のトラブルシューティング
<meta-ref type="dynamic" name="AC.ITBA.Variable.product_name__1">ToolsTalk 2</meta-ref> のアップグレード後、ToolsTalk Industrial Technique Host service を再起動します。
エラー | ソリューション |
|---|---|
エラーコード1920 スタートに失敗しました。アクセス権があることを確認してください。 | データベース認証エラーSQL データベースでは混合モードの認証を構成する必要があります。 SQL 管理スタジオを使用して認証を修正する必要があります。再度のインストールを試行する前にコンピューターを再起動する必要があると思われます。 |
InstallShield ウィザードは、インストールファイルの使用時に既にインストールがされているかどうかを検出します。コンピューターに古いインストールが存在する場合、検出されない場合もあります。
そのため、新たなインストールの開始前に、プログラムとデータベース カタログの古いインスタンスの削除を行うことが推奨されます。
起動時のトラブルシューティング
エラー | ソリューション |
|---|---|
アプリケーションは起動するが、目的のコントローラーが表示されない。 | コントローラー ネットワーク接続が正しくない。 コントローラーが工場ネットワークに正しく接続されていることを確認します。 ネットワーク接続が使用されている場合に該当します。 |
アプリケーションは起動するが、目的のコントローラーが表示されない。 | ToolsTalk 2 へのコントローラー構成が正しくない。 コントローラー構成ポイントから正しい ToolsTalk 2 サーバーへのサーバー接続 を確認します。 |
ToolsTalk 2 が起動したときにエラーメッセージ「ネットワーク接続が失われたか、サーバーが使用できません」が表示される。 | クライアント アプリケーションがサーバーアプリケーションに正しく接続されていない。 サーバーアプリケーションが起動したかどうかを確認します。 アプリケーションは自動的に起動するはずです。起動しない場合、アプリケーションを削除(アンインストール)してアプリケーションを再インストールすることが考えられます。 |
参考
フィールドバス信号
入力信号
シーケンスの中止 - 10012
バッチシーケンス中止要求が受信されると、バッチシーケンス機能は、進行中の締め付け結果を取得した後にのみバッチシーケンスを中止します。
SoftPLCでの名前 :ABORT_BATCH_SEQUENCE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
バッチ減分 - 10002
バッチカウンタを 1 づつ減分します。
SoftPLCでの名前 :BATCH_DECREMENT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
バッチ増分 - 10001
バッチカウンタを 1 づつ増分します。
SoftPLCでの名前 :BATCH_INCREMENT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
締め付けプログラムのバイパス - 10008
実行中のバッチシーケンスの次の締め付けプログラムをスキップします。
SoftPLCでの名前 :BYPASS_PSET
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
チャンネルコマンド - 10054
SoftPLCでの名前 :CHANNEL_COMMAND
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | uint32 配列 | 1 | 32 |
デバイス
この信号にはサブ信号が含まれています。すべてのサブシグナルについてはサブ信号 - 入力を参照してください。
フィールドバスを無効にする - 10049
フィールドバスを無効にします。
SoftPLCでの名前 :DISABLE_FIELDBUS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
テストボルトを無効化 - 10057
SoftPLCでの名前 :DISABLE_TESTBOLT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
ツールを無効化 - 30000
信号が「真」に設定されている場合、ツールはすぐに停止してロックされます。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
ダイナミック バッチサイズ - 10074
SoftPLCでの名前 :DYNAMIC_BATCH_SIZE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 16 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
操作の有効化 - 10055
SoftPLCでの名前 :ENABLE_OPERATION
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
PF への フィールドバス AsyncData - 10077
SoftPLCでの名前 :
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | uint8 配列 | 16 | 2048 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
フィールドバスロック緩め - 20021
接続され、サポートされているアクセサリで信号が設定されている場合、緩めを開始すると、仮想ステーションがロックされます。
[ドライブの停止]設定により、フィールドバスロック緩めが「真」に設定されている場合、進行中の緩めは直ちに中止されます。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
フィールドバスロックの締め付け - 20020
接続され、サポートされているアクセサリで信号が設定されている場合、仮想ステーションは締め付けの開始時にロックされます。
[ドライブの停止]設定により、フィールドバスロック締め付けが「真」に設定されている場合、進行中の締め付けは直ちに中止されます。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
フラッシュ読み取り結果のキュー - 30005
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
入力ビット4を選択 - 10066
SoftPLCでの名前 :SEL_INPUT_BIT_4
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
ダイナミック バッチサイズのID - 10073
SoftPLCでの名前 :DYNAMIC_BATCH_SIZE_TPID
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 16 |
TreatZeroAsOne | 状態 | 整数 | 1 | 16 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
ロック緩め - 20003
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
ロックの締め付け - 20002
ツールがデジタル入力により締め付けのためにロックされました。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
高でロックツール有効 - 20004
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
低でロックツール有効 - 20061
この信号が低いときにツールをロックします。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
マスターロック解除 - 10005
ロックページで定義されるほとんどのロックを解除します。
SoftPLCでの名前 :MASTER_UNLOCK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
パルス停止 - 10030
この信号が生成されると、進行中の締め付けまたは緩めが停止します。10024 または 10072と組み合わせて使用します。
SoftPLCでの名前 :TIGHTENING_STOP_PULSE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
結果の読み取りハンドシェイク 確認 - 30004
フィールドバスデバイスで結果の読み取りハンドシェイク機能を有効にして、後部結果のハンドシェイク確認の信号にコントローラを使用できるようにします。
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
すべての識別子をリセット - 10115
ソースバッチ文字列において、文字列受信シーケンスから受信したすべての文字列識別子を一度にリセットするために使用されます。他の作業タスクでは、VIN 番号をクリアします。
SoftPLCでの名前 :RESET_ALL_IDENTIFIERS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
バッチのリセット - 10003
バッチカウンタを 0 にリセットします。バッチ OK なし(nxOK)。バッチOKが有効化された場合、無効化されます。
SoftPLCでの名前 :RESET_BATCH
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
バッチシーケンスのリセット - 10053
バッチシーケンスをリセットします。完了時にツールをロックによってロックされているツールのロックを解除します。
SoftPLCでの名前 :RESET_BATCH_SEQUENCE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
サイクルステータスのリセット - 10056
SoftPLCでの名前 :RESET_CYCLE_STATUS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
最新の識別子をリセット - 10114
ソースバッチ文字列において、文字列受信シーケンスから受信した最新の文字列をリセットするために使用されます。他の作業タスクでは、VIN 番号をクリアします。
SoftPLCでの名前 :RESET_LATEST_IDENTIFIER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
シーケンスステータスのリセット - 10118
バッチシーケンスの完了/OK/NGおよびシーケンス中止の信号をリセットします。
SoftPLCでの名前 :RESET_SEQUENCE_STATUS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
システムエラーのリセット - 10062
SoftPLCでの名前 :RESET_SYSTEM_ERROR
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
多すぎるNGをリセット - 10013
[多すぎるNG] ロックを受けた後にバッチをリセットします
SoftPLCでの名前 :RESET_TOO_MANY_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
入力の選択 - 10020
シーケンス内のソース締め付け/バッチから締め付けプログラムを選択します。
SoftPLCでの名前 :SELECT_INPUT_VALUE
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 16 |
TreatZeroAsOne | 状態 | 整数 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
入力と動的バッチサイズの選択 - 30007
「外部バッチコントロール」を実行しているソース締め付けタスクにおいて、特定の「識別子番号」のバッチサイズを設定するために使用されます。
バッチサイズは1〜250に設定できます。
バッチサイズを0に設定すると、無限バッチとして扱われます。一度設定すると、ユーザーはバッチの設定を解除してサイズのない状態に戻すことはできません。
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 16 | 16 |
TreatZeroAsOne | 状態 | 整数 | 16 | 16 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
入力ビット0を選択 - 10016
SoftPLCでの名前 :SEL_INPUT_BIT_0
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
入力ビット1を選択 - 10017
SoftPLCでの名前 :SEL_INPUT_BIT_1
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
入力ビット2を選択 - 10018
SoftPLCでの名前 :SEL_INPUT_BIT_2
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
入力ビット3を選択 - 10019
SoftPLCでの名前 :SEL_INPUT_BIT_3
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
入力ビット5を選択 - 10067
SoftPLCでの名前 :SEL_INPUT_BIT_5
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
入力ビット6を選択 - 10068
SoftPLCでの名前 :SEL_INPUT_BIT_6
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
入力ビット7を選択 - 10069
SoftPLCでの名前 :SEL_INPUT_BIT_7
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
入力ビット8を選択 - 10070
SoftPLCでの名前 :SEL_INPUT_BIT_8
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
入力ビット9を選択 - 10071
SoftPLCでの名前 :SEL_INPUT_BIT_9
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
緩めを選択 - 10029
既定の動作モードとして緩めを選択し、スタートツール(- 10028 信号)と組み合わせて使用します。
SoftPLCでの名前 :SELECT_LOOSENING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
次の識別子番号を選択 - 10116
仮想ステーションのタスクが次のように構成されている場合は、[次の識別子番号を選択]信号を使用できます。
バッチシーケンス
ソース締め付け
ソースバッチ
番号識別子の方法
文字列識別子の方法
STセレクタで構成可能な機能「次をテイク」と「前をテイク」は 「次の識別子番号を選択」と「前の識別子番号を選択」の入力信号を有効にします。
仮想ステーションタスクとして選択されたバッチシーケンス
「自由な順序」スイッチが有効になっている場合、「次の識別子番号を選択」信号は、選択されたシーケンス内の異なるバッチを選択することができます。
バッチを選択する前に、バッチに識別子番号を割り当てる必要があります。バッチに識別子番号が割り当てられていない場合、「 自由な順序」 スイッチが有効になっている場合でも、「次の識別子番号を選択」信号では選択できません。
これにより、設定された識別子番号を持つバッチをループできます。
識別子番号が「なし」の場合、構成されている識別子番号を持つすべてのバッチが完了した後にのみ選択が可能です。
ループすることは可能ですが、0はスキップされます。バッチが完了すると、選択できなくなります。
たとえば、識別子番号1、2、4、5が割り当てられたバッチの場合、信号は次のようなループで実行されます:1、2、4、5、1、2、4…(バッチが終了していない限り)。
仮想ステーションタスクとして選択されたソース締め付け
信号は、ソース締め付けタスクで指定された締め付けプログラムのリストから、次の識別番号を選択します。
選択は、現在選択されているID番号から次に大きいID番号へと続きます。
最大の識別番号が選択されると、この信号は0を選択します。 0の後、信号は次に大きい識別子番号を選択します。
識別子番号として 0 を選択した場合、ツールはロックされます。
識別子番号がソース締め付けリストに追加されていても、締め付けプログラムが割り当てられていない場合、ソース締め付けリストをループしている間、その番号はスキップされます。
締め付けプログラムが識別番号に割り当てられており、その後締め付けプログラムのリストから削除されている場合でも、この識別子番号を選択することができます。この場合、特定の締め付けプログラムがないため、ツールはロックされます。
セレクタモードスイッチが 確認に設定されている場合、ソケットセレクタを割り当てて構成する必要があります。すべての締め付けプログラムを選択できますが、プログラムを実行する前に、適切なソケットをソケットセレクターから持ち上げる必要があります。
仮想ステーションタスクとして選択されたソースバッチ
ソース > バッチシーケンス > ソースバッチで、識別子方法が番号に設定されている場合、「次の識別子番号を選択」信号は、 ソースバッチタスクに表示されるシーケンスのリストからシーケンスを選択します。
0を含めてループすることは可能です。「次の識別子番号を選択」信号 は、シーケンスに割り当てられた識別子番号のみを選択します。
たとえば、識別子番号が1、2、4、8の4つのシーケンスが利用可能な場合、「次の識別子番号を選択」信号が繰り返され、1、2、4、8、0、1、2 ...が選択されます。
定義されていない識別子番号は選択されません。
ソース > バッチシーケンス > ソースバッチにおいて識別子方法が文字列に設定されている場合、外部ソース(スキャナーやOpen Protocolなど)からシーケンスを選択する必要があります。「次の識別子番号を選択」信号は、選択されたシーケンス内のバッチを選択できます。
SoftPLCでの名前 :SELECT_NEXT_ID_NUMBER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
前の識別子番号を選択 - 10117
仮想ステーションのタスクが次のように構成されている場合は、[前の識別子番号を選択]信号を使用できます。
バッチシーケンス
ソース締め付け
ソースバッチ
番号識別子の方法
文字列識別子の方法
STセレクタで構成可能な機能「次をテイク」と「前をテイク」は 「次の識別子番号を選択」と「前の識別子番号を選択」の入力信号を有効にします。
仮想ステーションタスクとして選択されたバッチシーケンス
「自由な順序」スイッチが有効になっている場合、「前の識別子番号を選択」信号は、選択されたシーケンス内の異なるバッチを選択することができます。
バッチを選択する前に、バッチに識別子番号を割り当てる必要があります。バッチに識別子番号が割り当てられていない場合、「 自由な順序」 スイッチが有効になっている場合でも、「前の識別子番号を選択」信号では選択できません。
これにより、設定された識別子番号を持つバッチをループできます。
識別子番号が「なし」の場合、構成されている識別子番号を持つすべてのバッチが完了した後にのみ選択が可能です。
ループすることは可能ですが、0はスキップされます。バッチが完了すると、選択できなくなります。
たとえば、識別子番号1、2、4、5が割り当てられたバッチの場合、信号は次のようなループで実行されます:5、4、2、1、5、4、2…(バッチが終了していない限り)。
仮想ステーションタスクとして選択されたソース締め付け
信号は、ソース締め付けタスクで指定された締め付けプログラムのリストから、前の識別番号を選択します。
選択は、現在選択されているID番号の前の小さいID番号へと続きます。
最小の識別番号が選択されると、この信号は0を選択します。 0の後、信号は次に小さい識別子番号を選択します。
識別子番号として 0 を選択した場合、ツールはロックされます。
締め付けプログラムが識別番号に割り当てられており、その後締め付けプログラムのリストから削除されている場合でも、この識別子番号を選択することができます。この場合、特定の締め付けプログラムがないため、ツールはロックされます。
セレクタモードスイッチが 確認に設定されている場合、ソケットセレクタを割り当てて構成する必要があります。すべての締め付けプログラムを選択できますが、プログラムを実行する前に、適切なソケットをソケットセレクターから持ち上げる必要があります。
仮想ステーションタスクとして選択されたソースバッチ
ソース > バッチシーケンス > ソースバッチで、識別子方法が番号に設定されている場合、「前の識別子番号を選択」信号は、 ソースバッチタスクに表示されるシーケンスのリストからシーケンスを選択します。
0を含めてループすることは可能です。「前の識別子番号を選択」信号 は、シーケンスに割り当てられた識別子番号のみを選択します。
たとえば、識別子番号が1、2、4、8の4つのシーケンスが利用可能な場合、「前の識別子番号を選択」信号が繰り返され、8、4、2、1、0、8、4 ...が選択されます。
定義されていない識別子番号は選択されません。
ソース > バッチシーケンス > ソースバッチにおいて識別子方法が文字列に設定されている場合、外部ソース(スキャナーやOpen Protocolなど)からシーケンスを選択する必要があります。「前の識別子番号を選択」信号は、選択されたシーケンス内のバッチを選択できます。
SoftPLCでの名前 :SELECT_PREVIOUS_ID_NUMBER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
緩め開始 - 10011
アクティブ信号で緩めを開始します。デジタル入力が非アクティブになると、緩めを停止する必要があります。
SoftPLCでの名前 :START_LOOSENING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
緩め開始、パルス - 10072
SoftPLCでの名前 :SELECT_PREVIOUS_ID_NUMBER
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
締め付け開始 - 10010
アクティブ信号で締め付けを開始します。入力が非アクティブになると、締め付けを停止する必要があります。
SoftPLCでの名前 :START_TIGHTENING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
緩め開始 パルス - 10024
締め付けが信号で開始します。締め付けが終了するまで、または締め付けプログラムで 30 秒間のタイムアウトが発生するまで実行します。
SoftPLCでの名前 :TIGHTENING_START_PULSE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
ツールの開始 - 10028
ツールを始動させる有効信号(デフォルトの動作モードは締め付けです)。信号が非アクティブになると、すぐにツールを停止する必要があります。緩めを選択 - 10029 信号と組み合わせて使用します。
SoftPLCでの名前 :START_DRIVE_CONTINIOUS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
ツール開始、パルス - 10113
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
SoftPLCへ - 10065
SoftPLCでの名前 :TO_PLC
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | uint8 配列 | 1 | 1 |
完了時にツールをロック解除 - 10051
「完了時にツールをロック」によってロックされているツールのロックを解除します。
SoftPLCでの名前 :UNLOCK_TOOL_ON_COMPLETE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
出力信号
有効な識別子の文字列 - 186
識別子の文字列が作業タスクによって受信され、受け入れられたときに設定されます。シーケンスまたは締め付けプログラムが実行されている必要があります。
ソースバッチシーケンスが実行されている場合、すべてのスキャンが受信され、シーケンスが選択されたときに設定されます。その場合、保存位置で構成された連結文字列が含まれます。
他の作業タスクの場合、「VIN」番号が含まれます。
SoftPLCでの名前 :ACTIVE_IDENTIFIER_STRING
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
有効な識別子の文字列 1 - 188
ソースバッチ文字列の最初に構成された文字列に対応する信号。
スキャンシーケンスが完了し、シーケンスが選択されると、有効識別子文字列1信号が送信され、これによって、識別子部分が有効になります。
文字列は保存位置でフィルタリングされます。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :ACTIVE_ID_STRING_1
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
有効な識別子の文字列 2 - 189
ソースバッチ文字列の2番目に構成された文字列に対応する信号。
スキャンシーケンスが完了し、シーケンスが選択されると、有効識別子文字列2信号が送信され、これによって、識別子部分が有効になります。
文字列は保存位置でフィルタリングされます。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :ACTIVE_ID_STRING_2
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
有効な識別子の文字列 3 - 190
ソースバッチ文字列の3番目に構成された文字列に対応する信号。
スキャンシーケンスが完了し、シーケンスが選択されると、有効識別子文字列3信号が送信され、これによって、識別子部分が有効になります。
文字列は保存位置でフィルタリングされます。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :ACTIVE_ID_STRING_3
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
有効な識別子の文字列 4 - 191
ソースバッチ文字列の4番目に構成された文字列に対応する信号。
スキャンシーケンスが完了し、シーケンスが選択されると、有効識別子文字列4信号が送信され、これによって、識別子部分が有効になります。
文字列は保存位置でフィルタリングされます。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :ACTIVE_ID_STRING_4
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
バッチ完了 - 30
バッチカウンタは、バッチサイズの数に等しいです。結果は [OK] または [NG] の可能性があります。
SoftPLCでの名前 :BATCH_COMPLETED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
バッチ完了 NG - 37
バッチは、ステータス NG で終了しました。
SoftPLCでの名前 :BATCH_COMPLETED_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
バッチ完了 OK - 36
バッチは、ステータス OK で終了しました。
SoftPLCでの名前 :BATCH_COMPLETED_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
バッチカウント - 31
バッチ内の現在の数。ディスプレイでのみ表示できます。
SoftPLCでの名前 :BATCH_COUNT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:真
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
バッチ実行中 - 32
バッチシーケンス内のバッチが実行中であることを示します。
SoftPLCでの名前 :BATCH_RUNNING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
バッチ シーケンス完了 NG - 46
バッチシーケンスは、ステータス NG で終了しました。
SoftPLCでの名前 :BATCH_SEQUENCE_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
バッチシーケンス完了 OK - 45
バッチシーケンスは、ステータス OK で終了しました。
SoftPLCでの名前 :BATCH_SEQUENCE_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
バッチ シーケンス終了 - 48
シーケンスがいつ完了したかを示します。バッチシーケンス完了OKとバッチシーケンス完了NGの両方の場合です。
SoftPLCでの名前 :BATCH_SEQUENCE_COMPLETED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | イベント | ブール値 | 1 | 1 |
反転 | イベント | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
バッチシーケンス実行中 - 47
バッチシーケンスが実行中かどうかを示します。
SoftPLCでの名前 :BATCHSEQUENCE_RUNNING
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
ボルトの締め付け状態 - 79
SoftPLCでの名前 :BOLT_TIGHTENING_STATUS
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | uint32 配列 | 32 | 32 |
FordResultStatus | 状態 | 4 | 4 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
この信号にはサブ信号が含まれています。すべてのサブシグナルについてはサブ信号 - 出力を参照してください。
チャンネルのハードウェア状態 - 81
SoftPLCでの名前 :CHANNEL_HARDWARE_STATUS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | uint32 配列 | 1 | 64 |
デバイス
この信号にはサブ信号が含まれています。すべてのサブシグナルについてはサブ信号 - 出力を参照してください。
チャンネルの締め付け状態 - 80
SoftPLCでの名前 :CHANNEL_TIGHTENING_STATUS
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | uint32 配列 | 1 | 64 |
FordResultStatus | 状態 | 4 | 4 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
この信号にはサブ信号が含まれています。すべてのサブシグナルについてはサブ信号 - 出力を参照してください。
構成バージョン - 88
SoftPLCでの名前 :CONFIGURATION_VERSION
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 32 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
コントローラスイッチオン - 42
IO Exchange の起動時に真に設定します。
SoftPLCでの名前 :IO_ON
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
現在実行中のバッチ - 180
シーケンスで現在実行中のバッチのインデックスを表示します。ソケットセレクターが使用されている場合、0、複数、または間違ったソケットが選択されているとゼロが表示されます。ソース締め付けの場合、バッチモードが使用されており、バッチが実行されている場合、1が表示されます。
SoftPLCでの名前 :CURRENT_RUNNING_BATCH_IX
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:真
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
サイクル完了 - 77
SoftPLCでの名前 :CYCLE_COMPLETE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
サイクル NG - 76
SoftPLCでの名前 :CYCLE_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
サイクル OK - 75
SoftPLCでの名前 :CYCLE_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
サイクル実行中 - 78
SoftPLCでの名前 :CYCLE_RUNNING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
サイクルの開始準備完了 - 82
SoftPLCでの名前 :CYCLE_READY_TO_START
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
非常停止 - 20036
SoftPLCでの名前 :EMERGENCY_STOP
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
イベントコード - 30001
トリガされたときにイベントをリレーします。瞬時、2サイクルタイム分オンになります。
SoftPLCでの名前 :EVENT_CODE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 16 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
イベントコードの重要度 - 30003
イベントコード重大度は、トリガーされたイベントにエラー重大度または警告がある場合に有効化される出力信号です。
SoftPLCでの名前 :EVENT_CODE_SEVERITY
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
イベントが存在 - 161
イベントがトリガーされたかどうかを示します。イベントがACKを必要とする場合のみ、アクセサリでトリガーされます。
SoftPLCでの名前 :EVENT_PRESENT
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
PF からの フィールドバス AsyncData - 107
SoftPLCでの名前 :
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | uint8 配列 | 48 | 2048 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
フィールドバス切断 - 96
SoftPLCでの名前 :FIELDBUS_DISCONNECTED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
SoftPLCから - 10064
PLCからアクセサリへのデータ転送用に割り当てられるバイト。
SoftPLCでの名前 :FROM_PLC
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | uint8 配列 | 8 | 8 |
デバイス
最後に受信した識別子の文字列 - 187
作業タスクで識別子を受信したときに直接設定されます。
ソースバッチ文字列の場合、スキャンプロセスのスキャンごとに設定されるため、スキャンごとに変更され、長さが一致しなくても送信されます。
文字列セットは未加工の形式であり、文字列の「保存された位置」だけではありません。
他の作業タスクの場合、この信号は有効な識別子文字列信号と同じです。
SoftPLCでの名前 :LAST_RECEIVED_ID_STRING
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
緩めがロック済み - 28
緩めが無効です。
SoftPLCでの名前 :LOOSENING_IS_LOCKED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
緩め NG - 74
NG 緩みが行われました。
SoftPLCでの名前 :LOOSENING_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
緩め OK - 70
OK 緩みが行われました。
SoftPLCでの名前 :LOOSENING_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
最大連続 NG になりました - 35
最大干渉 NG 締め付けカウンターに達したことを示します。
SoftPLCでの名前 :MAX_COHERENT_NOK_REACHED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
システムエラーなし - 83
SoftPLCでの名前 :NO_SYSTEM_ERROR
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
システム警告なし - 102
SoftPLCでの名前 :NO_SYSTEM_WARNING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
プログラムの開始 - 132
締め付けサイクルの開始レベルを定義します。
SoftPLCでの名前 :PROGRAM_START
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
読み取り結果のキューが点滅しました - 30006
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
受信済み識別子1 - 192
ソースバッチ文字列の最初に構成された文字列に対応する信号。
文字列が受信されるとすぐに、システムが文字列/識別子を受信した順序で、有効な識別子文字列1信号が送信されます。強制順序スキャンで実行している場合、構成された順序になりますが、自由順序スキャンを実行している場合、1は最初に構成された文字列ではなく、最初に受信した文字列に対応する場合があります。
文字列は未加工の受信文字列であり、「保存された位置」は適用されません。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :RECEIVED_IDENTIFIER_1
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
受信済み識別子2 - 193
ソースバッチ文字列の2番目に構成された文字列に対応する信号。
文字列が受信されるとすぐに、システムが文字列/識別子を受信した順序で、有効な識別子文字列2信号が送信されます。強制順序スキャンで実行している場合は、構成された順序になりますが、自由順序スキャンを実行している場合、2は2番目に構成された文字列ではなく、2番目に受信した文字列に対応します。
文字列は未加工の受信文字列であり、「保存された位置」は適用されません。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :RECEIVED_IDENTIFIER_2
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
受信済み識別子3 - 194
ソースバッチ文字列の3番目に構成された文字列に対応する信号。
文字列が受信されるとすぐに、システムが文字列/識別子を受信した順序で、有効な識別子文字列3信号が送信されます。強制順序スキャンで実行している場合、構成された順序になりますが、自由順序スキャンを実行している場合、3は3番目に構成された文字列ではなく、3番目に受信した文字列に対応する場合があります。
文字列は未加工の受信文字列であり、「保存された位置」は適用されません。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :RECEIVED_IDENTIFIER_3
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
受信済み識別子4 - 195
ソースバッチ文字列の4番目に構成された文字列に対応する信号。
文字列が受信されるとすぐに、システムが文字列/識別子を受信した順序で、有効な識別子文字列4信号が送信されます。強制順序スキャンで実行している場合、構成された順序になりますが、自由順序スキャンを実行している場合、4は4番目に構成された文字列ではなく、4番目に受信した文字列に対応する場合があります。
文字列は未加工の受信文字列であり、「保存された位置」は適用されません。
ソースバッチ文字列の実行時にのみ送信されます。
SoftPLCでの名前 :RECEIVED_IDENTIFIER_4
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
残りのバッチ - 33
バッチ内の残りの締め付け。ディスプレイでのみ表示できます。
SoftPLCでの名前 :REMAINING_BATCH
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:真
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
選択モード ID - 72
SoftPLCでの名前 :SELECTED_MODE_ID
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 32 |
TreatZeroAsOne | 状態 | 整数 | 1 | 32 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
選択されたシーケンスビット 0 - 139
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_0
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス:偽
内部入出力:真
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 真
選択されたシーケンスビット 1 - 140
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_1
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス:偽
内部入出力:真
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 真
選択されたシーケンスビット 2 - 141
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_2
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス:偽
内部入出力:真
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 真
選択されたシーケンスビット 3 - 142
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_3
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス:偽
内部入出力:真
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 真
選択されたシーケンスビット 4 - 143
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_4
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス:偽
内部入出力:真
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 真
選択されたシーケンスビット 5 - 144
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_5
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス:偽
内部入出力:真
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 真
選択されたシーケンスビット 6 - 145
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_6
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス:偽
内部入出力:真
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 真
選択されたシーケンスビット 7 - 146
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_7
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス:偽
内部入出力:真
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 真
選択されたシーケンスビット 8 - 147
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_8
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス:偽
内部入出力:真
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 真
選択されたシーケンスビット 9 - 163
選択したシーケンスを示すビットパターン。
SoftPLCでの名前 :SELECTED_SEQUENCE_BIT_9
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
フィールドバス:偽
インジケータボックス:偽
内部入出力:真
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 真
選択のシーケンス ID - 84
選択したバッチシーケンスのインデックスを表示します。
SoftPLCでの名前 :SELECTED_BATCH_SEQUENCE_ID
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 整数 | 1 | 16 |
TreatZeroAsOne | 状態 | 整数 | 1 | 16 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:真
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
シーケンス中止済み - 160
シーケンスが中止されたかどうかを示す出力信号。
SoftPLCでの名前 :SEQUENCE_ABORTED
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
サービスインジケータアラーム - 137
ツールのメンテナンスで構成されたサービスアラームは、ツールをサービスする時期をユーザーに通知するメカニズムを提供します。
SoftPLCでの名前 :SERVICE_INDICATOR_ALARM
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
シーケンスのサイズ - 181
現在実行中のシーケンスのサイズが表示されます。シーケンスが読み込まれたときにのみ設定され、シーケンスが完了したときにリセットされません。
SoftPLCでの名前 :SIZE_OF_RUNNING_SEQUENCE
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:真
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
ソフトウェアメジャーバージョン - 86
SoftPLCでの名前 :SOFTWARE_MAJOR_VERSION
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 32 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
ソフトウェアマイナーバージョン - 87
SoftPLCでの名前 :SOFTWARE_MINOR_VERSION
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 32 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
ソフトウェアリリースバージョン - 85
実行中ソフトウェアのバージョン。
SoftPLCでの名前 :SOFTWARE_RELEASE_VERSION
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 32 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
ステーション準備完了 - 71
仮想ステーションの準備がいつ完了するかを示します。
SoftPLCでの名前 :STATION_READY
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
テストボルト作動 - 91
SoftPLCでの名前 :SELECTED_MODE_ID
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
締め付けがロック済み - 27
締め付けは無効です。締め付けはできません。
SoftPLCでの名前 :TIGHTENING_IS_LOCKED
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
締め付け NG - 4
少なくとも 1 つの締め付けの結果が指定範囲外であることを示します。
SoftPLCでの名前 :TIGHTENING_NOK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
締め付け OK - 3
締め付けの結果が指定範囲内であることを示します。
SoftPLCでの名前 :TIGHTENING_OK
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
ツール緩め - 22
ツールが緩められていることを示します。
SoftPLCでの名前 :TOOL_LOOSENING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
ツール締め付け - 21
ツールが締め付けられていることを示します。
SoftPLCでの名前 :TOOL_TIGHTENING
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | ブール値 | 1 | 1 |
デバイス
入出力信号
結果のクリア - 39
次の締め付けに設定された他の信号のステータスをクリアします。
SoftPLCでの名前 :CLEAR_RESULTS
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
オープンプロトコルコマンドを無効化 - 10060
オープンプロトコルを介して仮想ステーションにコマンドを送信する機能を無効にします。
SoftPLCでの名前 :DISABLE_OPEN_PRTCOL_CMDS
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
外部識別子 - 10045
外部識別子で送信された文字列は、VIN番号として結果に含まれます。タスク選択のためにフィールドバスから渡される識別子を最大で2個まで提供することが可能です。
SoftPLCでの名前 :EXTERNAL_IDENTIFIER
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | 文字列 | 8 | 800 |
IdentifierU32Hnw | 状態 | 文字列 | 8 | 800 |
IdentifierU32 | 状態 | 文字列 | 8 | 800 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
外部監視 1 - 10035
外部監視1は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_1
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
外部監視 2 - 10036
外部監視2は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_2
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
外部監視 3 - 10037
外部監視3は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_3
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
外部監視 4 - 10038
外部監視4は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_4
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
外部監視 5 - 10039
外部監視5は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_5
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
外部監視 6 - 10040
外部監視6は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_6
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
外部監視 7 - 10041
外部監視7は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_7
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
外部監視 8 - 10042
外部監視8は、コントローラの特定の機能に接続されていない入出力信号であり、お客様固有のニーズに使用できます。
SoftPLCでの名前 :EXTERNAL_MONITORED_8
コンバーター | 信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|---|
標準 | 状態 | ブール値 | 1 | 1 |
反転 | 状態 | ブール値 | 1 | 1 |
デバイス
信号の重複を避けるために、 値コンバーターを定義することができます。
コンバーターは、同じ信号の複数の表現をサポートするために使用されます(たとえば、角度/トルクステータスは両方ともビット単位またはステータス文字として表すことができます)。
フィールドバスキープアライブ - 30002
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
フィールドバス:真
インジケータボックス:偽
内部入出力:偽
オペレータパネル: 偽
ツール機能:偽
ST セレクタ:偽
スタックライト: 偽
TLS タグ:偽
入出力拡張器: 偽
一般的な IO 1 - 50
オープンプロトコルに使用される入出力 1。
SoftPLCでの名前 :GENERIC_IO_1
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
一般的な IO 10 - 59
オープンプロトコルに使用される入出力 10。
SoftPLCでの名前 :GENERIC_IO_10
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
一般的な IO 2 - 51
オープンプロトコルに使用される入出力 2。
SoftPLCでの名前 :GENERIC_IO_2
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
一般的な IO 3 - 52
オープンプロトコルに使用される入出力 3。
SoftPLCでの名前 :GENERIC_IO_3
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
一般的な IO 4 - 53
オープンプロトコルに使用される入出力 4。
SoftPLCでの名前 :GENERIC_IO_4
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
一般的な IO 5 - 54
オープンプロトコルに使用される入出力 5。
SoftPLCでの名前 :GENERIC_IO_5
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
一般的な IO 6 - 55
オープンプロトコルに使用される入出力 6。
SoftPLCでの名前 :GENERIC_IO_6
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
一般的な IO 7 - 56
オープンプロトコルに使用される入出力 7。
SoftPLCでの名前 :GENERIC_IO_7
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
一般的な IO 8 - 57
オープンプロトコルに使用される入出力 8。
SoftPLCでの名前 :GENERIC_IO_8
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
一般的な IO 9 - 58
オープンプロトコルに使用される入出力 9。
SoftPLCでの名前 :GENERIC_IO_9
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
状態 | 整数 | 1 | 8 |
デバイス
一般的な立ち上がりエッジ 1 - 169
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_1
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
一般的な立ち上がりエッジ 10 - 178
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_10
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
一般的な立ち上がりエッジ 2 - 170
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_2
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
一般的な立ち上がりエッジ 3 - 171
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_3
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
一般的な立ち上がりエッジ 4 - 172
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_4
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
一般的な立ち上がりエッジ 5 - 173
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_5
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
一般的な立ち上がりエッジ 6 - 174
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_6
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
一般的な立ち上がりエッジ 7 - 175
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_7
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
一般的な立ち上がりエッジ 8 - 176
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_8
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
一般的な立ち上がりエッジ 9 - 177
一般入出力信号。
SoftPLCでの名前 :GENERIC_RISING_EDGE_9
信号タイプ | 値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|---|
イベント | ブール値 | 1 | 1 |
デバイス
サブ信号 - 入力
結果なしを阻害
SoftPLCでの名前 :CHANNEL_COMMAND_NO_RESULT
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
NG 結果を阻害
SoftPLCでの名前 :CHANNEL_COMMAND_NOK_RESULT
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
OK 結果を阻害
SoftPLCでの名前 :CHANNEL_COMMAND_OK_RESULT
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
Pset の強制
SoftPLCでの名前 :CHANNEL_COMMAND_FORCE_PSET
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
整数 | 1 | 8 |
ボルト ID の強制
SoftPLCでの名前 :CHANNEL_COMMAND_FORCE_BOLT_ID
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
整数 | 1 | 8 |
サブ信号 - 出力
すべての信号
SoftPLCでの名前 :CYCLE_STATUS_ALL
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
整数 | 1 | 32 |
サイクル実行中
SoftPLCでの名前 :CYCLE_STATUS_RUNNING
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
禁止
SoftPLCでの名前 :CYCLE_STATUS_INHIBITED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
選択モードで
SoftPLCでの名前 :CYCLE_STATUS_IN_SELECTED_MODE
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
修理実行中
SoftPLCでの名前 :CYCLE_STATUS_REPAIR
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
終了処理実行中
SoftPLCでの名前 :CYCLE_STATUS_TERMINATE
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
引き締め実行中
SoftPLCでの名前 :CYCLE_STATUS_RUNNING_TIGHTENING
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
緩め実行中
SoftPLCでの名前 :CYCLE_STATUS_RUNNING_LOOSENING
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクル OK
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_OK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクル NG
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_NOK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
阻止された最後のサイクル
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_INHIBITED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
含まれていない最後の締め付け
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_NOT_INCLUDED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
その他による最終サイクル終了
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_TERMINATED_BY_OTHER
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終サイクルハードウェアエラー
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_HW_ERROR
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツール LED ミラー緑
SoftPLCでの名前 :CYCLE_STATUS_TOOL_LED_MIRROR_GREEN
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツール LED ミラー黄
SoftPLCでの名前 :CYCLE_STATUS_TOOL_LED_MIRROR_YELLOW
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
ツール LED ミラー赤
SoftPLCでの名前 :CYCLE_STATUS_TOOL_LED_MIRROR_RED
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終締め付け OK
SoftPLCでの名前 :CYCLE_STATUS_LAST_TIGHTENING_OK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終締め付け NG
SoftPLCでの名前 :CYCLE_STATUS_LAST_TIGHTENING_NOK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後の緩めOK
SoftPLCでの名前 :CYCLE_STATUS_LAST_LOOSENING_OK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後の緩めNG
SoftPLCでの名前 :CYCLE_STATUS_LAST_LOOSENING_NOK
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクルタイムアウト
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_TIMEOUT
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終サイクルトルク高
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_TORQUE_HIGH
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクルトルク低
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_TORQUE_LOW
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最終サイクル角度高
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_ANGLE_HIGH
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
最後のサイクル角度低
SoftPLCでの名前 :CYCLE_STATUS_LAST_CYCLE_ANGLE_LOW
値のタイプ | 最小サイズ [ビット] | 最大サイズ [ビット] |
|---|---|---|
ブール値 | 1 | 1 |
Soft PLC信号
パラメーター ID | 名前 | 向き | 説明 |
|---|---|---|---|
10010 | 締め付け開始 (連続) | 入力 | アクティブ信号で締め付けを開始します。入力が非アクティブになると、締め付けを停止する必要があります。 |
10016 | 入力ビット 0 を選択 | 入力 | 選択ビット0の入力信号 |
10017 | 入力ビット 1 を選択します。 | 入力 | 選択ビット1の入力信号 |
10018 | 入力ビット 2 を選択 | 入力 | 選択ビット2の入力信号 |
10019 | 入力ビット 3 を選択 | 入力 | 選択ビット3の入力信号 |
10020 | 入力の選択 | 入力 | 入力選択値。 |
10024 | 締め付け+開始(パルス) | 入力 | 締め付けが信号で開始します。締め付けが終了するまで、または締め付けプログラムで 30 秒間のタイムアウトが発生するまで実行します。 |
10030 | 締め付け/緩め停止(パルス) | 入力 | この信号が生成されると、進行中の締め付けまたは緩めが停止します。10024 と組み合わせて使用します。 |
10045 | 外部識別子 | 入出力 | タスク選択のためにフィールドバスから渡される識別子を最大で2個まで提供します。 |
10049 | フィールドバスの無効化 | 入力 | フィールドバスを無効にします。 |
10066 | 入力ビット 4 を選択 | 入力 | 選択ビット 4 の入力信号 |
10067 | 入力ビット 5 を選択 | 入力 | 選択ビット 5 の入力信号 |
10068 | 入力ビット 6 を選択 | 入力 | 選択ビット 6 の入力信号 |
10069 | 入力ビット 7 を選択 | 入力 | 選択ビット 7 の入力信号 |
10070 | 入力ビット 8 を選択 | 入力 | 選択ビット 8 の入力信号 |
10071 | 入力ビット 9 を選択 | 入力 | 選択ビット 9 の入力信号 |
10072 | 緩め開始(パルス) | 入力 | この信号が高になると、緩め同期モードが開始されます。 緩め開始(パルス)信号が低になっても、緩みが完了するまで実行されます。 |
10064 | PLCから | 入力 | SoftPLCからアクセサリに情報を運ぶバイト配列。 |
10054 | チャンネルコマンド | 入力 | チャンネルコマンドを使用すると、個々のツールを禁止して、次の締め付けに含まれないようにすることができます。 |
10055 | 操作の有効化 | 入力 | 固定システムで締め付けを実行できるようにするには、高に設定する必要があります。締め付け中低に設定されると、締め付けは停止され、サイクルのステータスはNGとなります。 |
10056 | サイクルステータスのリセット | 入力 | [サイクルステータスをリセット] が 真 に設定されている場合、ステーションとすべてのボルトのステータスがリセットされます。 この信号が締め付け中に設定された場合、信号は無視されます。 |
10057 | テストボルトを無効にする | 入力 | 信号は、テストボルトを外部ソースから実行できるかどうかを制御します。信号が真(高)の場合、外部ソースからテストボルトを実行することはできません。 |
10062 | システムエラーのリセット | 入力 | この入力が高に設定されている場合、システムはハードウェアエラーのリセットを試みます。 |
82 | サイクルの開始準備完了 | 出力 | システムが締め付けを開始する準備ができると、信号は高に設定されます。次の条件が満たされると、システムは準備完了です。
|
78 | サイクル実行中 | 出力 | システムが締め付けを実行している間は、高に設定します。 |
77 | サイクル完了 | 出力 | 実行サイクルが完了し、データが持続的に保存される場合は、「高」に設定します。 |
75 | サイクル OK | 出力 | 最後の締め付けが OK であった場合は高に設定し、開始信号を受信するとクリアされます。 |
76 | サイクル NG | 出力 | 最後の締め付けが NG であった場合は高に設定し、開始信号を受信するとクリアされます。 |
83 | システムエラーなし | 出力 | システムにハードウェアエラーがない場合、システムエラーなしは真に設定されます。 |
91 | テストボルト有効 | 出力 | テストボルト有効は、テスト締め付けが有効になっているかどうかを表示するために使用されます。 |
20036 | 非常停止 | 出力 | システムが非常停止した場合は高に設定します。 |
42 | IOオン | 出力 | コントローラがオンになりました。 |
96 | フィールドバス切断 | 出力 | フィールドバス切断は、フィールドバスが切断されると真に設定されます。 |
102 | システム警告なし | 出力 | ツールのいずれかが「サービス時期」または「キャリブレーション時期」をレポートしている場合、システム警告なしは高に設定されます。 |
100 | 識別子受信 | 出力 | 受信した識別子は、新しい識別子が受信されたことを示すために使用されます。 |
72 | 選択モード ID | 出力 | [選択モード ID] は、モードが有効な場合に入力モード値をミラーリングします。モードが無効であるか、モードが選択されていない場合、「0」が送信されます。 |
79 | ボルトの締め付け状態 | 出力 | 同期締め付けにおける個々のボルトのステータス。100本のボルトがサポートされています。 |
80 | チャンネルの締め付け状態 | 出力 | 同期締め付けにおける個々のチャンネルのステータス。64チャンネルがサポートされています。 |
81 | チャンネルのハードウェア状態 | 出力 | 個々のチャンネルのハードウェアステータス。 |
85 | ソフトウェアリリースバージョン | 出力 | コントローラで実行されているソフトウェアのリリースバージョン。 |
86 | ソフトウェアメジャーバージョン | 出力 | コントローラで実行されているソフトウェアのメジャーバージョン。 |
87 | ソフトウェアマイナーバージョン | 出力 | コントローラで実行されているソフトウェアのマイナーバージョン。 |
88 | 構成バージョン | 出力 | 現在コントローラーで使用されている構成のバージョン。 |
10065 | PLCへ | 出力 | アクセサリからSoftPLCに情報を伝達するバイト配列。 |
非周期結果項目
これは、非周期データとして送信できる結果項目のリストです。
非周期的な結果アイテム |
|---|
バッチサイズ |
バッチシーケンスカウンタ: |
バッチシーケンスの現ステータス |
バッチの現ステータス |
バッチカウント |
バッチシーケンス名 |
バッチシーケンスのインデックス |
総ステータス追加情報 |
モード名 |
ステータス |
締め付けプログラム名 |
ステータス |
操作モード |
ステータス情報 |
停止エラー |
ボルト番号 |
最終トルク |
経過時間 |
ボルト名 |
チャンネル |
失敗ステップ |
トルク低制限 |
トルク高制限 |
最終角度 |
角度低制限 |
角度高制限 |
ターゲット角度 |
ターゲットトルク |
開始最終角度 |
ツール品番 |
ツールシリアル番号 |
コンパクトエラー |
最終角度 |
トルク差 |
角度差 |
最大時間限度 |
Date and time (日時) |
VIN |
シャットオフトルク |
ポストスレッドカット角度実測値 |
ポストスレッドカットピークトルク実測値 |
トルクレート |
トルクレート偏差 |
角度ウィンドウの低トルク |
ポストビュー平均トルク高 |
ポストビュートルクの角度高 |
スティックスリップ検出-測定された振動数 |
シャットオフ電流 |
ポストビュー平均トルク低 |
ポストビュートルクの角度低 |
降伏角度 |
プリベリングトルク |
監視時間 |
ピークトルク |
角度 |
角度ウィンドウのピークトルク |
ピークトルク-下限 |
シャットオフトルク-下限 |
ピークトルク-上限 |
シャットオフトルク-上限 |
トルクレートと偏差-トルクレートの下限 |
トルクレートと偏差-トルクレートの上限 |
トルクレートと偏差-偏差限界 |
角度ウィンドウのトルク-上限 |
角度ウィンドウのトルク-下限 |
ポストビュートルク高-上限 |
ポストビュートルク低-下限 |
シャットオフ電流-下限 |
降伏点からの角度-上限 |
降伏点からの角度-下限 |
シャットオフ電流-上限 |
時間-下限 |
プリべリングトルク-上限 |
プリべリングトルク-下限 |
時間-上限 |
経過時間 |
クロススレッド |
最大時間-上限 |
クロススレッド(食い違い)-下限 |
クロススレッド(食い違い)-上限 |
全体的なステータス追加情報
各ボルトのマルチレベルと全体レベルには、全体ステータス追加情報と呼ばれるフィールドがあります。このフィールドに使用できるパラメータは、以下の表に記載されています。
パラメータ | コメント |
|---|---|
修復済み | 締め付けの全体的なステータスはOKですが、締め付け中に少なくとも、1つの修復されたエラーが発生しました。 |
不良品管理によって終了 | ボルトにはそれ自体のエラーはありませんでしたが、別のボルトのエラーのため、終了するように指示されました。 |
不良品管理の終了に失敗しました | ボルトの中止が指示され、中止パスの実行中にエラーが発生しました。 |
停止しました | たとえばフィールドバスを介して送信された機械停止、またはツールトリガが解除された場合などの外部からの停止信号によって、締め付けが終了しました。 |
緊急停止しました | 締め付けは緊急停止により終了しました。 |
ツールエラー | ツールのハードウェアエラーにより締め付けは終了しました。 |
ドライブエラー | ドライブのハードウェアエラーのため締め付けが終了しました。 |
禁止 | 外部信号によってブロックされているため、デバイスは実行できませんでした。 |
無効なPset | コントローラが無効な締め付けプログラムをロードしました。 |
始動前確認に失敗しました | コントローラの 始動前確認ステータスが失敗しました。ツールエラー、緊急停止がアクティブである、システムが停止信号を受信した、など、さまざまな理由が考えられます。 |
不良品管理の修復に失敗しました | ボルトの修復が命じられ、修復パスの実行中にエラーが発生しました。 |
エクスポートとインポートのファイル形式
コントローラ構成(設定)と結果のエクスポートとインポートは、ToolsTalk 2アプリの様々な場所から行うことができます。エクスポートの結果が異なるファイル内容になることがあります。
さらに処理するために締め付け結果やイベントをエクスポートします。
アトラスコプコのサービスエンジニアからのデバッグ支援のために、ting ログファイルをエクスポートします。
別のコントローラに設定をコピーするために使用できるコントローラ構成をエクスポートします。
コントローラデータのエクスポートは、コントローラのタイプとコントローラソフトウェアのバージョンによって異なることがあります。ファイル形式とファイル内容の詳細については、各コントローラとバージョンのマニュアルを参照してください。
この表は、ToolsTalk 2 エキスポートの概要を示します。
位置 | パス | ファイルタイプと形式 | 使用法 |
|---|---|---|---|
コントローラライブラリ構成 |
| *.json | コントローラ構成のエクスポートとコントローラテンプレートの作成。 ToolsTalk 2の中で使用。 |
フィールドバス構成 |
| *.json | フィールドバス構成のエクスポート。構成のコピーに使用。インポートコマンドと一緒に使用。 ToolsTalk 2の中で使用。 |
コントローラソフトウェアとデータ管理 |
| *.tar.gz | コントローラ結果とコントローラからの構成の完全なエクスポートのために使用。ツールログのエクスポートも可能。 以前にエクスポートされたファイルの構成とパラメータのインポートにも使用可能。 |
スケジュールされたコントローラのエクスポートとインポート |
| *.tar.gz | コントローラからのコントローラ結果と構成のスケジュールされた完全なエクスポートに使用。 以前にエクスポートされたファイルの構成とパラメータのスケジュールされたインポートにも使用可能。 |
コントローラのエクスポートとインポート |
| *.tar.gz | コントローラからのコントローラ結果と構成のスケジュールされた完全なエクスポートに使用。 以前にエクスポートされたファイルの構成とパラメータのスケジュールされたインポートにも使用可能。 ユーザー権限によってグローバルアイコンへのアクセスが禁止されている場合の別のルートとして使用。 |
結果のエクスポート |
| *.csv | コントローラからの締め付け結果のエクスポートのみに使用。 |
コントローラソフトウェア |
| *px2it.zip | 新しいコントローラソフトウェアの読み込み。 |
ファイルタイプと形式 | 使用法 |
|---|---|
*.json | ToolsTalk 2の中で使用されるファイル形式 ファイルは構成とパラメータ設定のコピーに使用可能。 このファイル形式は、 ToolsTalk 2アプリでは使用できません。 |
*.tar.gz | コントローラ結果とコントローラからの構成の完全なエクスポートのために使用。 ファイル形式はコントローラでは使用できない。ファイルには次のモジュールを含むことができる。
|
*.csv | コントローラからの締め付け結果またはイベントのエクスポートのみに使用。 このファイルは *.tar.gz ファイルに含まれる。 CSV ファイルは、コントローラの言語設定に応じて、フィールドを区切るのに多様な文字を使用。 フィールドはコントローラソフトウェアバージョンによって異なる。 |
*px2it.zip | コントローラソフトウェアの読み込みにのみ使用される。構成やパラメータ設定は含まない。 |
印刷シナリオ
ステーションでの印刷
印刷するプログラムがコントローラ上に存在し、TT2スタンドアロンバージョンがインストールされたアトラスコプコPCのいずれかにアクセスできる場合に使用します。Flexコントローラに接続してステーションでプログラムを印刷する:
締め付けプログラムを選択して開き、表示します。
プログラムを印刷するには、ソフトウェアの右上にある [印刷] ボタンを使用します。(Windows 10マシンの場合、TT2で印刷オプションを使用すると、デフォルトで「Microsoft print to pdf」というオプションが使用可能になります。以前のバージョンでは、このオプションは、Adobe acrobat をインストールするか、古い Windows マシン上で Foxit PDF リーダーをインストールするいずれかで追加することができます)。
アクティブ(オンライン)Flexコントローラを備えたPF6 FlexSystemを使用した印刷
印刷するプログラムが、アクセスできないコントローラからエクスポートされたxxx.tar.gzファイルに入っている場合は、これを使用してください。システムからエクスポートされた tar.gz ファイルを使用してプログラムを印刷する:
任意のPF6 Flexコントローラに接続します。
コントローラから現在の設定(元の設定)をエクスポートします。これは、最後に復元できるようにするために、既存のシステムをバックアップするために行われます。
印刷する締め付けプログラムを含む構成ファイルをこのコントローラーにインポートします。
ステーションでの印刷の手順に記載されているように締め付けプログラムを開いて印刷します。
手順2で保存した元の設定をインポートして、コントローラを元の状態に戻します。
非アクティブ(オフライン)PF6 FlexSystemを使用したPF6 FlexSystemでの印刷
これは、システムの前にいなくてもファイル(xxx.jsonファイル)を印刷できる最も簡単な方法を提供します。
.json ファイルは、オフラインコントローラ (ライブラリ) から構成をエクスポートした結果として作成されます。
.json ファイルをライブラリにインポートします。
ライブラリの.jsonファイルから構成を開きます。
締め付けプログラムを開いて印刷します。
tar.gz と .json の間の変換
設定は、接続されたコントローラとオフラインコントローラの間で移動できます。XXX.tar.gz から XXX.json へ、またはその逆に移動できます。
前提条件:
Flex コントローラ
TT2のインストール
.tar.gz ファイルを .json ファイルに変換するには:
アクティブ(オンライン)Flexコントローラを備えたPF6 FlexSystemを使用した印刷 での印刷のステップ1-3 に従ってください。
左の列にあるコントローラ名を右クリックし、「ライブラリに追加」を選択します。
ライブラリに移動し、オフラインコントローラとしてライブラリに追加されたコントローラ名を見つけます。
[コントローラ] チェックボックス-[管理]-[.json ファイルのエクスポート] を選択します。
.jsonファイルを.tar.gzファイルに変換するには:
非アクティブ(オフライン)Flexコントローラを備えたPF6 FlexSystemを使用した印刷 での印刷のステップ1-2 に従ってください。
[コントローラ] チェックボックス-[管理]-[配信] を選択します。これにより、接続されているコントローラに配布するチェックボックス項目のリストがポップアップ表示されます。関連するものを確認し、配信を選択します。
プラント構造 - コントローラを開き、エクスポートしてxxx.tar.gzファイルを取得します。
システム情報
問題 | ソリューション |
|---|---|
インストール ファイル | C:\Program Files (x86)\Atlas Copco\ToolsTalk Client C:\Program Files (x86)\Atlas Copco\ToolsTalk Server C:\Program Files (x86)\Atlas Copco\ToolsTalk Station Setup |
インストールからのログファイル | 各インストール フォルダーには log.txt という名のログファイルがあります。 |
コンピューターの IP アドレス | コントローラー構成に必要とされる情報です。 Windows の [スタート] メニューを選択します。 ウィンドウ最下部にあるボックスに cmd を入力して <リターン> キーを押します。管理者ウィンドウが開きます。 ipconfig と入力して<リターン> キーを押します。コンピューターのIPアドレスが表示されます。 |
コンピューター名 | クライアント インストールを正しいサーバー インストールにポイントするために必要な情報です。 Windows の [スタート] メニューを選択します。 ウィンドウ最下部にあるボックスに system information を入力して <リターン> キーを押します。システム情報のウィンドウが開きます。 クライアント インストールがサーバーの場所にポイントするにはシステム名パラメーターが必要です。 |
データベース カタログの削除 | 選択された SQL サーバーの管理スタジオを起動します。 目的のデータベース カタログを選択します。既定の名称は ToolsTalkEventStore です。 右クリックして 削除 を選択します。 チェックボックス バックアップの削除 … のチェックボックスをオンにします。 既存を閉じる... のチェックボックスをオンにします。 [OK] を選択します。 |
データベース認証を確認して修正します。 | 選択された SQL サーバーの管理スタジオを起動します。 目的のサーバーを選択します。 右クリックして プロパティ を選択します。 セキュリティ ページを選択します。 サーバー認証フィールドの SQL サーバーおよび Windows 認証 のラベルの付いたラジオボタンをオンにします。 |
Functionality Management System (FMS) のインストール | クライアント - サーバー インストールにおける唯一のアプリケーションです。 FMS インストールは InstallShield ウィザードの一部であり、自動的に実行されます。正しくインストールするには、システム変数 JAVA_HOME の値が正しい必要があります。 Windows の [スタート] メニューを選択します。 ウィンドウ最下部にあるボックスに System variables を入力します。いくつかのオプションが表示されます。システム環境変数の編集 を選択します。システムプロパティのポップアップ ウィンドウが開きます。 Environment variables コマンドボタンを選択します。 System variables のウィンドウをスクロールダウンして変数 JAVA_HOME を検索します。 この変数が存在する場合、その値は64ビット Java インストールの値です。 変数が存在しない場合、新規 コマンドボタンを選択します。新しいシステム変数のポップアップ ウィンドウが開きます。 変数名 は JAVA_HOME に設定されている必要があります。 変数値 はインストール ディレクトリ、つまり C:\PROGRAM FILES\JAVA\JRE1.8.0_131 に設定されている必要があります。BIN フォルダーは含めないでください。 |
Functionality Management System (FMS) のインストールが正しく行われたかを確認します。 | Windows の [スタート] メニューを選択します。 ウィンドウ最下部にあるボックスに Services を入力します。いくつかのオプションが表示されます。Services を選択します。システムプロパティのポップアップ ウィンドウが開きます。 リストをスクロールダウンしてFlexNet License Server -acopco を検索します。 Status が Started, と表示されている場合、FMS がインストール済みで実行中です。 |
ToolsTalk 2 サーバーがインストール済みで実行中かを確認します。 | Windows の [スタート] メニューを選択します。 ウィンドウ最下部にあるボックスに Services を入力します。いくつかのオプションが表示されます。Services を選択します。システムプロパティのポップアップ ウィンドウが開きます。 リストをスクロールダウンして Atlas Copco Industrial Technique Host for ToolsTalk を検索します。 Status が Startedと表示されている場合、サーバーがインストール済みで実行中です。 |