AX1-1.5-F
Torque Arm
产品信息
一般信息
安全警示语
危险、警告、小心和注意等安全警示语的意思如下:
危险 | 危险表示一种危险的情况,如果不能避免,将会导致死亡或严重伤害。 |
警告 | 警告表示一种危险的情况,如果不能避免,可能导致死亡或严重伤害。 |
小心 | 小心与安全警告标志一起使用,表示一种危险的情况,如果不能避免,可能会导致轻微或中等程度的伤害。 |
注意 | 注意用于指示与个人伤害无关的操作。 |
保修
产品保修期将在 Atlas Copco 配送中心发货后的 12+1 个月后到期。
保修不包括部件正常的磨损和断裂。
“正常磨损和断裂部件”是指在工具常规维护期内,需要更换、进行其他调整/大修的部件(以时间、运行时数或其他形式表示)。
产品保修以工具及组件的正常使用、维护和修理为前提。
本保修不适用于在保修有效期内因维护保养不当或由 Atlas Copco 及其授权维修服务合作伙伴之外的他方进行维修保养而造成的损坏部件。
要避免工具零配件损坏或断裂,请按建议的维护周期保养工具并严格遵守说明操作。
保修类修理仅在 Atlas Copco 维修间或由获得授权的维修服务合作伙伴处理。
Atlas Copco 通过 ToolCover 合约提供延保及最佳的预防维护服务。有关详情,请联系您当地的服务代表。有关详情,请联系您当地的服务代表。
网站
有关我们的产品、配件、备件和已发布事项的信息,请访问 Atlas Copco 网站。
请访问:www.atlascopco.com.
ServAid
ServAid 是一个持续更新的门户网站,含有技术信息,例如:
法规和安全信息
技术数据
安装、操作和维修说明
备件列表
附件
尺寸图
请访问:https://servaid.atlascopco.com.
如需进一步的技术信息,请联系您当地的 Atlas Copco代表。
原产地
对于原产地,请参见产品标签上的信息。
尺寸图
尺寸图可以在尺寸图存档或 ServAid 上找到。
请访问:http://webbox.atlascopco.com/webbox/dimdrw或 https://servaid.atlascopco.com。
概览
产品概述
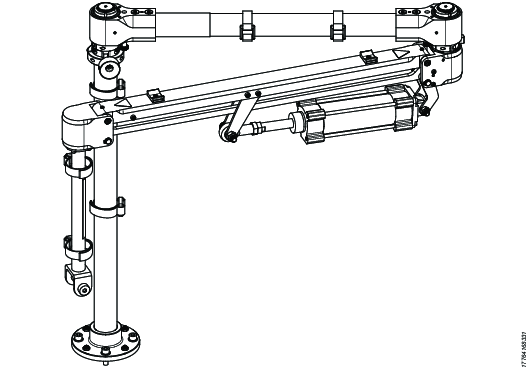
扭矩臂是一种机械装置,可握住螺母扳手及螺丝刀。此铰接扭矩臂吸收并反作用于所有扭矩输出,从而防止操作员劳损、疲劳和受伤。该固定扭矩臂可在垂直和水平拧紧方向上施加扭矩。为工具使用直柄式工具架。
扭矩容量 | 150 Nm |
触及长度 | 1.5 m 4.9 ft |
承载能力 | 12.5 kg (4 bar) |
臂组件概览
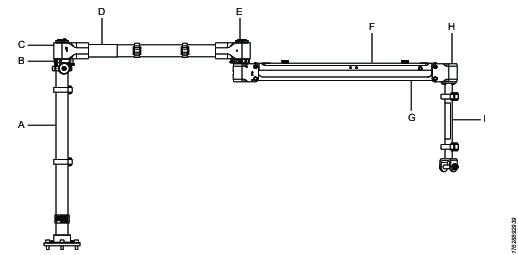
项目 | 说明 |
|---|---|
A | 支柱 |
B | 可调节旋转止动件 |
C | 肩关节 |
D | 动臂 |
E | 肘关节 |
F | 外平行臂 |
G | 内平行臂 |
H | 手法兰 |
I | 垂直杆 |
臂尺寸
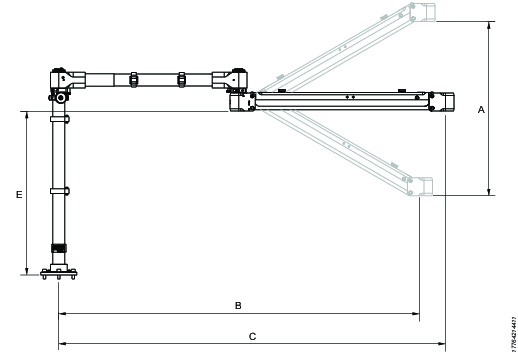
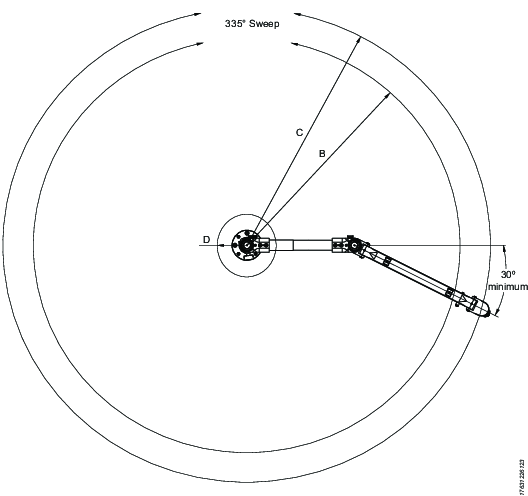
设置好手臂后,必须遵守 30 度角限制。
项目 | 说明 | 长度 |
|---|---|---|
A | 垂直行程 - 气动 | 750 mm (29.5 in) |
B | 工作半径 - 气动 | 1460 mm (57.4 in) |
C | 最大工作半径 | 1557 mm (61.2 in) |
D | 内部工作半径 | 151 mm (5.9 in) |
E | 垂直杆安装高度 | 686 mm (27.0 in) |
产品技术数据
产品技术数据可以在 ServAid 或 Atlas Copco网站上找到。
请访问:https://servaid.atlascopco.com或 www.atlascopco.com。
附件
扭矩臂附件
扭矩臂附件包括可将其正确安装到地板或工作台上的安装套件。
位置 3 | Posi 3-F-Kit(F 型号) | 4390 1710 11 |
位置 4 | Posi 4-R-Kit(R 型号) | 4390 1710 12 |
工作台直接安装硬件(用于臂的安装套件) | 工作台直接安装套件 | 4390 1820 11 |
通过 40 mm 的工作台安装硬件(用于臂的安装套件) | 工作台安装套件 40 mm | 4390 1820 12 |
通过 75 mm 的工作台安装硬件(用于臂的安装套件) | 工作台安装套件 75 mm | 4390 1820 13 |
控制器安装 -AX1-支柱安装(控制器安装套件) | 控制器安装套件 AX1 | 4390 1820 14 |
保养概述
环境条件
设备必须在密闭且干燥的环境中运行,温度范围为 + 5°C 至 + 50°C。
禁止在有爆炸危险(气体和/或易燃物质达到饱和状态)的环境中使用它。
安装
安装要求
气动系统
气动控制电路图
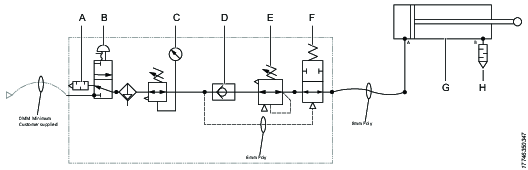
项目 | 组件 |
|---|---|
A | 消音器 |
B | 泄压锁定阀(带消音器) |
C | 过滤器/调节器(带压力表) |
D | 止回阀 |
E | 精密调节器 |
F | 可调先导式止回阀 |
G | 气缸 |
H | 消音器 |
主供气调节
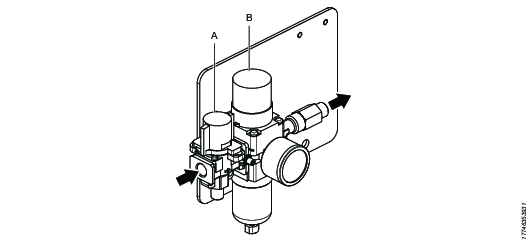
项目 | 组件 |
|---|---|
A | 泄压锁定阀 |
B | 带压力表的过滤器/调节器 |
主供气向平衡控制气缸提供空气。必须为系统提供足够的最小压力,以使设备正常且安全地运行。
通过顶部的旋钮调节过滤器/调节器装置 (B)。
上拉旋钮以解除旋转锁定。
顺时针旋转旋钮增大压力,逆时针旋转减小压力。
压力设置到适当水平后,将盖子向下按以锁定。
通过过滤器/调节器上的压力表监控压力水平。
平衡控件
平衡控件可作为提升辅助工具,方便工具定位。要调节臂的平衡,请配置精密调节器 (A)。先导式止回阀 (B) 用于防止平行臂段在突然失去空气时下降。
平衡控制电路由以下组件组成:
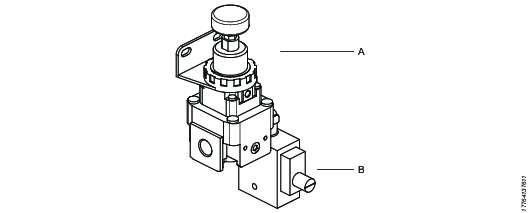
项目 | 组件 |
|---|---|
A | 精密调节器 |
B | PO 止回阀 |
锚固系统
项目 | 说明 | 制造商 | 零件号 | 数量 |
|---|---|---|---|---|
ETAG(欧洲) | ||||
锚杆 - HAS-TZ M10x75/30 | Hilti | 308383 | 4 | |
胶粘剂胶囊 - HVU-TZ M10 | Hilti | 311368 | 4 | |
ACI(美国) | ||||
锚杆 - HAS-E-55 – 3/8”x3” | Hilti | 2197984 | 4 | |
胶粘剂 – HIT-HY 200-A | Hilti | 2022791 | 1 | |
锚固概览
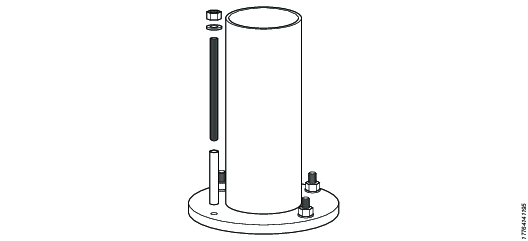
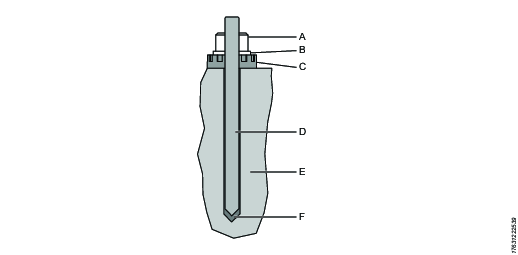
部件 | 部件名称 |
A | 防松螺母 |
B | 垫圈 |
C | 底座 |
D | 锚 |
E | 混凝土地面 |
F | 胶黏剂胶囊 |
地板属性
扭矩臂应安装在具有足够刚度和支撑力的表面上,以承受扭矩反作用以及扭矩臂组件和工具的总重量。
混凝土板厚度 | 150 mm | 6 in | 最小值 |
混凝土抗压强度 | C20/25 | 3000 lbf/in2 | 最小值 |
骨料尺寸 | 25 mm | 1 in | 最大值 |
强化质量 | 500 Bst - 延展性标准(A 级)bar ASTM A615 Grade 60 bar | ||
混凝土板面积 | 2.25 m2 | 3488 in2 | |
尺寸 | |||
宽度 | 1500 mm | 59 in | |
长度 | 1500 mm | 59 in | |
混凝土钢截面积 | |||
X 和 Y 方向的面积 | 188 mm2/m | 0.089 in2/ ft | |
最终用户有责任确保地面条件符合所示的规格。如果最终用户选择了不同于指定的固定材料(锚),则他们有责任确保锚足够用于该应用。必须始终遵守适当的安装说明。
安装说明
手臂水平调节
使用 M10(4 个)紧固件将支柱固定到安装表面。不要完全拧紧,以便留下在安装完成后进行调平的机会。

安装完成后,确认支柱安装螺栓已拧松。
调节固定螺丝,直至达到所需的调平位置。
拧紧固定螺丝上的防松螺母,以确保固定螺丝不会自由移动。
重新拧紧安装螺栓以完全固定支柱。
操作
操作说明
启动先决条件
所有电气组件(拧紧控制器、电源等)必须预热至室温 (20°C),以避免冷凝损坏。
确保工具的控制单元与电源和整个设施正确集成,以便能够正确处理通知和信号。
检查所有电气电缆、连接器、电源、气动和机械连接是否正确。
在操作之前,请根据维护计划清洁并润滑设备的所有零件。
检查设备是否有任何损坏。
在启动之前,必须在工作站对工作站的操作员进行培训。培训操作员是工厂所有者的责任。我们强烈建议请 Atlas Copco 对操作员进行此项培训。
启动前
在设备启动之前,必须执行以下过程:
确保关节臂位于停车钩上。
确保正确连接所有气动组件和软管。
确保控制器系统已开启。
打开供气闭锁阀以给系统加压。
将设备连接到主供气后,核实位于空气调节器处的压力表上的入口压力。确保将压力设置为最低要求。如果未达到最低压力,请检查主供气。
调节关节臂的平衡。可以使用调节旋钮来配置精密调节器。增大或减小压力,直到关节臂处于所需位置。上升和下降的力应大致相同。调节压力后,确保拧紧旋钮柄上的锁紧螺母。
遵循先导式止回阀设置程序,防止平行臂段在突然失去空气时下降。
一般操作安全
由于存在缠绕风险,请勿佩戴手套。
使用个人防护装置。始终佩戴眼部及足部护具。钢头鞋、安全眼镜和安全帽等防护装备将减少人身伤害。执行下列动作时,始终穿戴个人安全装备:
设备清洗
维护或检查
清理堵塞
调整
设备包含安全罩,以防在设备运行时接触设备的危险部分。绝对禁止任何形式的操纵或修改。
在输入压力降低的情况下,将臂放在停车钩上并关闭设备,直到压力恢复正常。
在短时间中断时,臂应位于停车钩上。
运行期间不得改变有效载荷。
若要使工具停止工作,请将工具控制单元的主开关转到“OFF”位置。
下班后或在较长时间停用之前,将臂放在停车钩上,并在关机前关闭供气截止阀。
先导式阀门设置程序
必须有足够量的空气使平行臂保持在位。如果空气被排出,先导式 (PO) 止回阀可阻止气缸升降辅助。先导式止回阀的功能是防止平行臂段在突然失去空气时下降。
打开气源,设置过滤调节器和精密调节器压力,以保持臂的正确平衡。
将臂降到其垂直行程中的最低位置,或将臂置于停止位置,以防止臂在失去空气时下降。
降低主供气压力,使其比要求的平衡压力低 0.3 bar (4 psi)。
确保臂仍处于平衡和功能状态。
将先导式止回阀调节器(顺时针)增加至最大弹簧压力。
确认先导式止回阀现已关闭,这意味着气缸将被锁定,无法移动。
慢慢降低(逆时针)先导式止回阀上的压力,直到阀门打开,或直到气缸能够再次移动。
将主供气压力增加回标称规定压力。
如果正确执行,若突然失去空气供应,气缸现在将保持在原位。
用固定螺丝锁定先导式止回阀调节器,以确保不会发生意外移动。
平衡控制调节
为了在不同的负载变化下使关节臂保持平衡,必须首先将主供气过滤器/调节器设为适当的设置。
要调节臂的平衡,请使用调节旋钮配置精密调节器 (A)。
增大或减小压力,直到关节臂处于水平位置。上升和下降的力应大致相同。
调节压力后,确保拧紧旋钮柄上的锁紧螺母。
确保空气输入连接螺纹应为 1/4“ G。
空气通常会从排放孔(精密调节器侧面的孔)释放。根据调节器的设计,这是必需的空气消耗 - 不是异常。
维修
维护说明
维护间隔
下表列出了 AX 关节臂组件的维护间隔。建议保存设备的维护日志,将其固定在设备上,并应包括任何客户特定要求和其他要求。
故障排除和维修只能由训练有素的人员执行。
常规
说明 | 每天一次 | 每月一次 | 每季度一次 | 每年一次 |
使用碎布或压缩空气清洁并擦拭设备,以去除灰尘和残留物。 | X | |||
检查所有紧固件。 | X | |||
检查所有电缆和空气管线是否正确布线。确保所有移动关节处都有足够的松弛度,以防止损坏。 | X |
机械
说明 | 每月一次 | 每季度一次 | 每年一次 |
检查支柱底座上的水平支脚和锚固件。 | X | ||
检查将肩关节连接到支柱的螺丝。 | X | ||
检查动臂、弯头和平行臂上的螺丝。 | X | ||
检查连接手法兰和垂直杆的螺丝。垂直杆夹到手法兰上。 | X | ||
检查将垂直杆连接到工具架的螺丝。 | X | ||
验证活动关节是否功能正常。 | X | ||
检查臂的运动是否有异常漂移。如有必要,使用底座上的水平螺丝将臂调平。 | X | ||
检查工具有无磨损或损坏情况。 | X | ||
检查套筒有无磨损或损坏情况。必要时进行更换。 | X | ||
检查所有气缸 U 形夹和轴是否磨损。必要时润滑。 | X | ||
检查并设置肩膀和肘关节处的所有止动件,以根据需要限制行程。检查夹紧螺丝并确保正确拧紧。 | X | ||
检查轴承的运行情况。拆下驱动轴以检查并在需要时手动润滑轴承。 | X |
电气
说明 | 每月一次 | 每季度一次 |
检查电缆是否有磨损、扭结、割伤、夹伤、裂纹等情况。检查连接器以确认其是否松动或损坏。根据需要更换电缆。 | X | |
检查电磁阀的功能。 | X |
气动
说明 | 每天一次 | 每月一次 | 每季度一次 | 每年一次 |
检查系统是否漏气。 | X | |||
检查空气制备功能 - 过滤器和调节器。确保组件中没有碎屑。 | X | |||
检查过滤器是否有凝结。必要时,去除凝结。 | X | |||
更换滤芯。 | X | |||
检查空气软管和管件是否有磨损、扭结、割伤、夹伤、裂纹等情况。检查连接器以确认其是否松动或损坏。视需要更换软管。 | X | |||
检查气缸的功能。检查密封件是否磨损。视需要更换气缸。 | X | |||
更换消音器。 | X | |||
检查平衡调节器的功能。确保调节器没有碎屑。 | X | |||
检查阀门的功能。确保阀门中没有碎屑。 | X |
一般保养和维护安全
所有的维护和维修必须由专门人员进行。
平衡控制电路必须由专门人员保养或维修。
在进行任何维护或维修之前,必须中断空气供应。臂应位于停车钩上,供气截止阀必须关闭,必须从气动系统中排出空气。
空气软管应每 6 年更换一次。
维护或维修前的检查表
确保控制器系统已关闭。
确保关节臂位于停车钩上。
关闭供气锁止阀,释放系统中的残余压力。
先导式止回阀:按手动压力释放按钮释放气缸内的残余压力。
通过检查位于过滤器/调节器处的表压以及气缸上的精密调节器之后的表压,核实系统中的压力已经排尽。
储存和包装
储存前,必须对设备进行清洁,并对可氧化的部件进行防腐/防锈/润滑处理。将设备包装在密封的聚乙烯薄膜包装内。
储存区必须为密闭、干燥的环境,温度介于 + 5°C 至 + 50°C 之间。
疑难解答
一般故障排除
症状 | 原因 | 解决方案 |
|---|---|---|
手臂大幅偏移或移动。 | 手臂不水平 手臂有效载荷超过容量。 | 调整手臂的水平度。 减少有效载荷。 |
手臂很难横向移动。 | 轴承肩部螺母太紧。 肩部或肘轴承被污染。 轴承需要重新润滑。 | 稍微松开肩部螺母。 检查/清洁/更换轴承。 重新润滑轴承。 |
空气损失/无空气供应。 | 主供气在截止阀处关闭。 空气软管或管道已断开。 气动组件堵塞。 滤芯污染:由于过滤器的阻力增加,流量受到限制和/或过滤器后面的压力太低。 | 检查主供气截止阀。 检查接头和空气软管或管道连接。 检查组件是否堵塞并清除污染物。 更换滤芯 |
手臂难以举起(高力)/容易下拉。 手臂难以降低(高力)/容易举起。 | 负载不再平衡 - 精密压力调节器的设置不正确。 | 调节精密压力调节器。 |
接通供气后,负载突然移动。 | 气缸的平衡压力太低或太高。 | 检查精密压力调节器的设置。 |