MTRwrench 85
产品信息
一般信息
安全警示语
危险、警告、小心和注意等安全警示语的意思如下:
危险 | 危险表示一种危险的情况,如果不能避免,将会导致死亡或严重伤害。 |
警告 | 警告表示一种危险的情况,如果不能避免,可能导致死亡或严重伤害。 |
小心 | 小心与安全警告标志一起使用,表示一种危险的情况,如果不能避免,可能会导致轻微或中等程度的伤害。 |
注意 | 注意用于指示与个人伤害无关的操作。 |
质保
产品保修期将在 Atlas Copco 配送中心发货后的 12+1 个月后到期。
保修不包括部件正常的磨损和断裂。
“正常磨损和断裂部件”是指在工具常规维护期内,需要更换、进行其他调整/大修的部件(以时间、运行时数或其他形式表示)。
产品保修以工具及组件的正常使用、维护和修理为前提。
本保修不适用于在保修有效期内因维护保养不当或由 Atlas Copco 及其授权维修服务合作伙伴之外的他方进行维修保养而造成的损坏部件。
要避免工具零配件损坏或断裂,请按建议的维护周期保养工具并严格遵守说明操作。
保修类修理仅在 Atlas Copco 维修间或由获得授权的维修服务合作伙伴处理。
Atlas Copco 通过 ToolCover 合约提供延保及最佳的预防维护服务。有关详情,请联系您当地的服务代表。有关详情,请联系您当地的服务代表。
电动马达:
保修仅适用于未打开过的电动马达。
网站
有关我们的产品、配件、备件和已发布事项的信息,请访问 Atlas Copco 网站。
请访问:www.atlascopco.com.
ServAid
ServAid 是一个持续更新的门户网站,含有技术信息,例如:
法规和安全信息
技术数据
安装、操作和维修说明
备件列表
附件
尺寸图
请访问:https://servaid.atlascopco.com.
如需进一步的技术信息,请联系您当地的 Atlas Copco代表。
原产地
对于原产地,请参见产品标签上的信息。
尺寸图
尺寸图可以在尺寸图存档或 ServAid 上找到。
请访问:http://webbox.atlascopco.com/webbox/dimdrw或 https://servaid.atlascopco.com。
概览
系统概述
MTRwrench 85 是一个组合了电子扭矩传感器的机械咔哒扳手。拧紧程序通过 Power Focus 6000 或 Power Focus 8 进行配置并分配给扳手,它们使用 MWR-KIT 作为网关与 MTRwrench 85 进行无线通信。
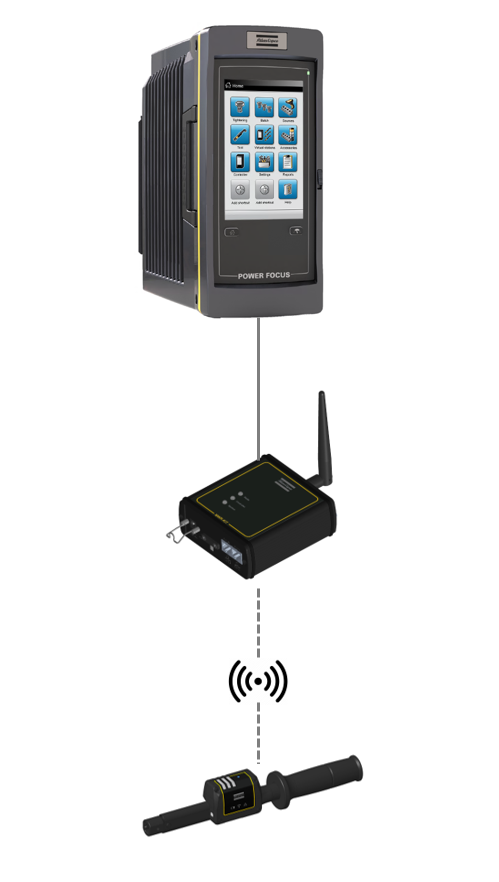
有关如何管理和配置 MTRwrench 85 的详细信息,请参阅 MWR-KIT 产品说明、Power Focus 6000 用户指南和 Power Focus 8 用户指南。
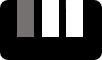
工具概述
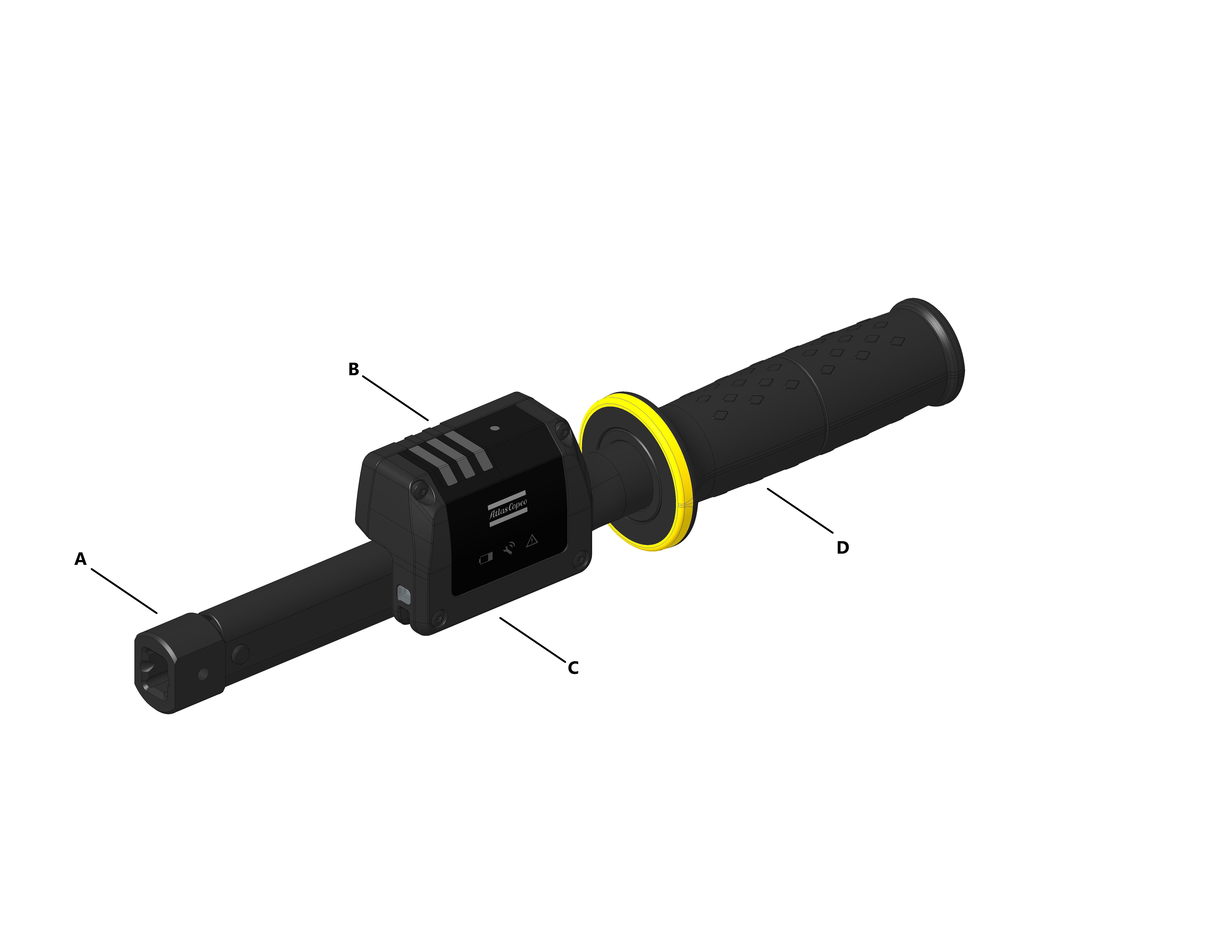
A | 驱动器 | B | 电池盒 |
C | 带 LED 指示灯的人机界面 (HMI) | D | 手柄 |
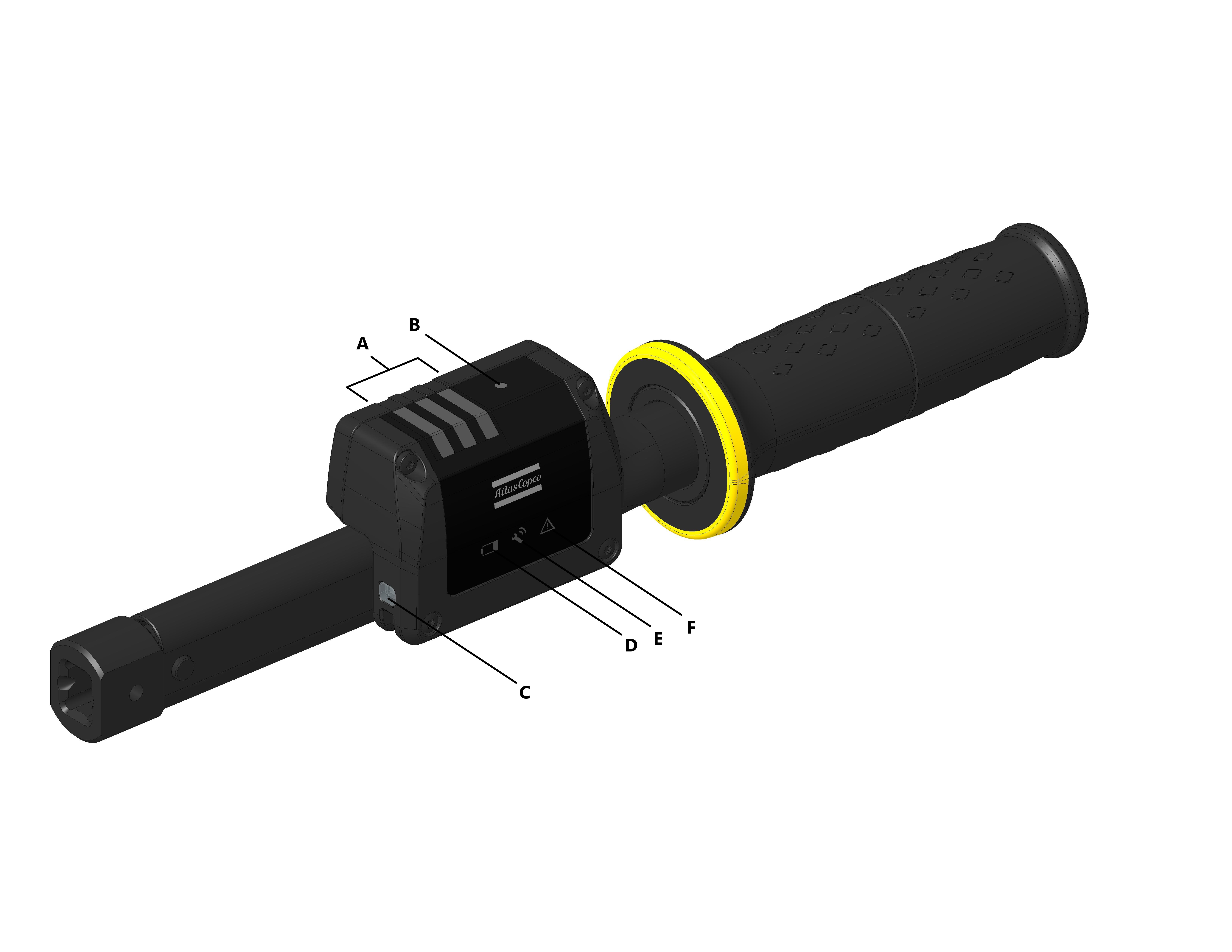
LED 指示灯概述
MTRwrench 85 人机界面配有四个 LED 指示灯,用于显示不同的扳手状态,还有一组三个 LED 指示灯,用于显示操作进度和结果。
在操作员无法完全看到人机界面的情况下,还可使用额外的正投影 LED 来显示拧紧操作的结果。
位置 | 名称 | 主要含义 |
|---|---|---|
A | 进度 LED |
|
B | 工作就绪 LED |
|
C | 正投影 LED |
|
D | 电池电量 LED |
|
E | 无线电通信 LED |
|
F | 错误/警告 LED |
|
电池电量 LED 指示灯
MTRwrench 85 配备了 LED 指示灯,当电池电量低于特定阈值时,指示灯会提醒操作员。
电池电量 LED 行为如下:
LED 反应 | 电池电量 | 附注 | |
|---|---|---|---|
关闭 |
| 11% / 15% / 35% - 100% | 电池电量可满足工作要求。 范围的下限取决于通过 MWR-KIT 进行的“低电量 [%]”配置。 |
闪烁红光 |
| 11% - 14/28% | 电池电量低。 范围的上限取决于通过 MWR-KIT 进行的“低电量 [%]”配置(默认禁用:在这种情况下从不闪烁) |
稳定红光 |
| 0% - 10% | 电池电量用完。 |


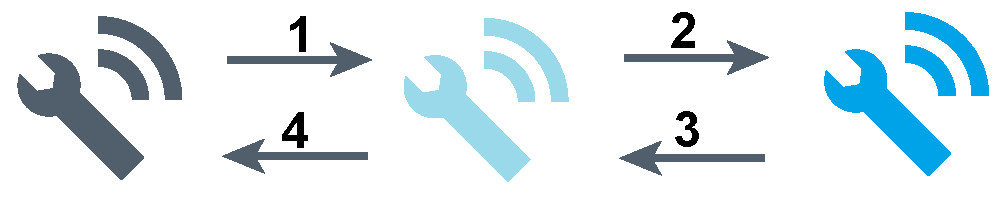
无线电通信 LED 指示灯
MTRwrench 85 配有一个 LED 指示灯,可向操作员显示扳手的无线通信状态。
无线电通信 LED 行为如下:
LED 反应 | LED 状态 | 涵义 | |
|---|---|---|---|
关 |
| 无线通信关闭。 | |
呼吸 |
| 联机:无线通信开启,连接的扳手在覆盖范围内 | |
闪烁 |
| 脱机:无线通信开启,连接的扳手不在覆盖范围内 | |
关 | 开 | ||
慢闪 |
| 扳手未使用:无线通信开启,扳手未连接 | |
长按 | 短按 | ||

工作就绪 LED 指示灯
当 Power Focus 6000/Power Focus 8 分配的拧紧程序成功发送到 MTRwrench 85 时,MTRwrench 85 配备的 LED 指示灯会通知操作员。
工作就绪 LED 行为如下:
扳手条件 | LED 反应 | 涵义 | |
|---|---|---|---|
扳手禁用 | 关闭 |
| 拧紧程序缺失。 |
扳手禁用 | 稳定蓝光 |
| 已收到拧紧程序。扳手准备就绪。 |
扳手启用 | 关闭 |
| 拧紧操作正在进行。 |


调零 LED 指示灯
MTRwrench 85 LED 指示灯可在需要调零时通知操作员,并显示调零过程的进度、完成情况和可能出现的错误:
LED 指示灯 | 涵义 | 附注 | |
|---|---|---|---|
进度 LED 全部闪烁白光 |
| 需要调零。 | 将扳手插入充电架中。 |
进度 LED 依次来回亮起和熄灭。 |
| 调零正在进行。 固件更新进行中 | 前往移动扳手。 请勿对扳手施加任何负载。 |
进度 LED 熄灭 |
| 调零已成功完成。 | - |
进度 LED 闪白光 |
| 由于扳手移动或对传感器施加负载,导致调零失败。 | 取下扳手,再次放入充电架,开始新的调零。 |
进度 LED 恒亮红色 |
| 由于扳手移动或在调零期间第二次向传感器施加负载,导致调零失败。 | 取下扳手,再次放入充电架,开始新的调零。 |

 +
+ 充电 LED 指示灯
当扳手位于充电架中且调零过程完成后,MTRwrench 85 指示灯向操作员显示充电状态:
1 个 LED 闪烁白光 |
| 电池电量在 0% 至 30% 之间 |
一个 LED 恒亮白光,第二个闪烁白光 |
| 电池电量在 31% 至 60% 之间 |
两个 LED 恒亮白光,第三个闪烁白光 |
| 电池电量在 61% 至 90% 之间 |
三个 LED 恒亮白光 |
| 电池电量在 91% 至 100% 之间 |



拧紧操作 LED 指示灯
在拧紧操作过程中,MTRwrench 85 LED 指示灯可向操作员直观地反馈正在进行的拧紧操作的进度和结果:
操作阶段 | LED 指示灯行为 | 涵义 | |
|---|---|---|---|
拧紧程序已发送至扳手 | 工作就绪 LED 恒亮 |
| 扳手收到拧紧程序 |
拧紧中 | 进度 LED 1 闪烁白光 |
| 已达到扭矩的 10-25% 或检测到拧松 |
拧紧中 | 进度 LED 1 恒亮白光 |
| 已达到咔哒扭矩的 25% |
拧紧中 | 进度 LED 1 恒亮白光 |
| 已达到咔哒扭矩的 40% |
拧紧中 | 进度 LED 1 恒亮白光 |
| 已达到咔哒扭矩的 55% |
拧紧中 | 进度 LED 1 恒亮白光 |
| 已达到咔哒扭矩的 70% |
拧紧中 | 进度 LED 1 恒亮白光 |
| 已达到咔哒扭矩的 85% |
拧紧成功完成 | 所有进度 LED 闪灭 |
| 已达到咔哒扭矩的 100% |
拧紧结果 | 所有进度 LED 恒亮绿光 |
| 结果正常 |
拧紧结果 | 所有进度 LED 闪红光 |
| 结果异常 根据拧紧策略,可能的原因是:
|





错误和警告 LED 指示灯
MTRwrench 85 错误/警告 LED 指示灯,与进度 LED 一起,向操作员显示检测到的错误或损坏。
LED 指示灯 | 诊断 | 纠正措施 | |
|---|---|---|---|
警告 LED 闪烁红光 |
| 传感器轻微过载 | 将扳手放入充电架,进行调零。 |
所有进度 LED 闪红光 |
| 由于传感器严重过载 | 停止运行拧紧操作并联系 Atlas Copco 客户服务。 |
进度 LED 闪白光 |
| 由于扳手移动或对传感器施加负载,导致调零失败。 | 取下扳手,再次放入充电架,开始新的调零。 |
进度 LED 恒亮红光 |
| 由于扳手移动或在调零期间第二次向传感器施加负载,导致调零失败。 | 取下扳手,再次放入充电架,开始新的调零。 |
进度 LED 熄灭 + 警告 LED 闪红光 |
| 需要校准或机械维修。 | 将扳手送去维修 |

环境条件
仅供室内使用 | |
海拔高度 | 最高 2000 m |
环境温度范围 | +5 至 +40 °C |
温度最高达 31 °C 时的最大相对湿度为 80 %,温度为 40 °C 时,相对湿度呈线性递减至 50 % |
|
产品数据
工作扭矩测量范围 | 17 [N·m] - 85 [N·m] / 12.5 [lb·ft] - 62.7 [lb·ft] |
驱动器 | 9 x12 mm |
总长度 | 212 mm |
重量 | 496 g |
操作扭矩范围 | 从容量的 20% 到 100% |
机械咔哒重复性 | ± 3% |
扭矩测量精度 | ± 3% |
过载容量 | 标称容量的 150 % |
最大角速度 | 250 °/s |
角度测量精度 | ± 3.6 ° / 360 °(每秒 6°) |
扭矩测量的温度稳定性 | +10 °C 至 +40 °C(10 °F 至 104 °F) |
拧紧结果存储器容量 | 10000(最大值) |
电源 | 可充电 NiMH AA 电池 1900mAh 1.2V |
无线电距离 | 最高 20 m 该距离可能受到多种因素的影响:
|
尺寸
A [mm] | B [mm] | C [mm] | D [mm] | E [mm] | F [mm] | G [mm] | H [mm] |
|---|---|---|---|---|---|---|---|
52.5 | ⌀ 26.3 | 11.2 | 307.1 | 12 | 9 | 32.2 | 19 |
无线电模块频率
有关频率选择,请参阅当地法规。
欧洲
编号 | 信道 | 频率 [MHz] | 数据速率 [bit/s] |
|---|---|---|---|
1 | 51 | 868.044 | 19200 |
2 | 52 | 868.088 | 19200 |
3 | 53 | 868.132 | 19200 |
4 | 54 | 868.176 | 19200 |
5 | 55 | 868.221 | 19200 |
6 | 56 | 868.265 | 19200 |
7 | 57 | 868.309 | 19200 |
8 | 58 | 868.353 | 19200 |
9 | 59 | 868.397 | 19200 |
10 | 60 | 868.442 | 19200 |
11 | 61 | 868.486 | 19200 |
12 | 62 | 868.530 | 19200 |
13 | 63 | 868.744 | 19200 |
14 | 64 | 868.788 | 19200 |
15 | 65 | 868.832 | 19200 |
16 | 66 | 868.876 | 19200 |
17 | 67 | 868.921 | 19200 |
18 | 68 | 868.965 | 19200 |
19 | 69 | 869.009 | 19200 |
20 | 70 | 869.053 | 19200 |
21 | 71 | 869.097 | 19200 |
22 | 72 | 869.142 | 19200 |
23 | 73 | 869.444 | 19200 |
24 | 74 | 869.488 | 19200 |
25 | 75 | 869.532 | 19200 |
美国
编号 | 信道 | 频率 [MHz] | 数据速率 [bit/s] |
|---|---|---|---|
1 | 1 | 902.132 | 19200 |
2 | 2 | 902.176 | 19200 |
3 | 3 | 902.220 | 19200 |
4 | 4 | 902.264 | 19200 |
5 | 5 | 902.308 | 19200 |
6 | 6 | 902.352 | 19200 |
7 | 7 | 902.396 | 19200 |
8 | 8 | 902.440 | 19200 |
9 | 9 | 902.484 | 19200 |
10 | 10 | 902.528 | 19200 |
11 | 11 | 902.572 | 19200 |
12 | 12 | 902.616 | 19200 |
13 | 13 | 902.660 | 19200 |
14 | 14 | 902.704 | 19200 |
15 | 15 | 902.748 | 19200 |
16 | 16 | 902.792 | 19200 |
17 | 17 | 902.836 | 19200 |
18 | 18 | 902.880 | 19200 |
19 | 19 | 902.924 | 19200 |
20 | 20 | 902.968 | 19200 |
21 | 21 | 903.012 | 19200 |
22 | 22 | 903.056 | 19200 |
23 | 23 | 903.100 | 19200 |
24 | 24 | 903.144 | 19200 |
25 | 25 | 903.188 | 19200 |
26 | 26 | 903.232 | 19200 |
27 | 27 | 903.276 | 19200 |
28 | 28 | 903.320 | 19200 |
29 | 29 | 903.364 | 19200 |
30 | 30 | 903.408 | 19200 |
31 | 31 | 903.452 | 19200 |
32 | 32 | 903.496 | 19200 |
33 | 33 | 903.540 | 19200 |
34 | 34 | 903.584 | 19200 |
35 | 35 | 903.628 | 19200 |
36 | 36 | 903.672 | 19200 |
37 | 37 | 903.716 | 19200 |
38 | 38 | 903.760 | 19200 |
39 | 39 | 903.804 | 19200 |
40 | 40 | 903.848 | 19200 |
41 | 41 | 903.892 | 19200 |
42 | 42 | 903.936 | 19200 |
43 | 43 | 903.980 | 19200 |
44 | 44 | 904.024 | 19200 |
45 | 45 | 904.068 | 19200 |
46 | 46 | 904.112 | 19200 |
47 | 47 | 904.156 | 19200 |
48 | 48 | 904.200 | 19200 |
附件
兼容的电池
可充电 NiMH AA 电池(1900 mAh,1.2 V)为 MTRwrench 85 供电。
该工具与上述可充电电池兼容。
建议使用零件编号为
4027 0048 20 的可充电电池。
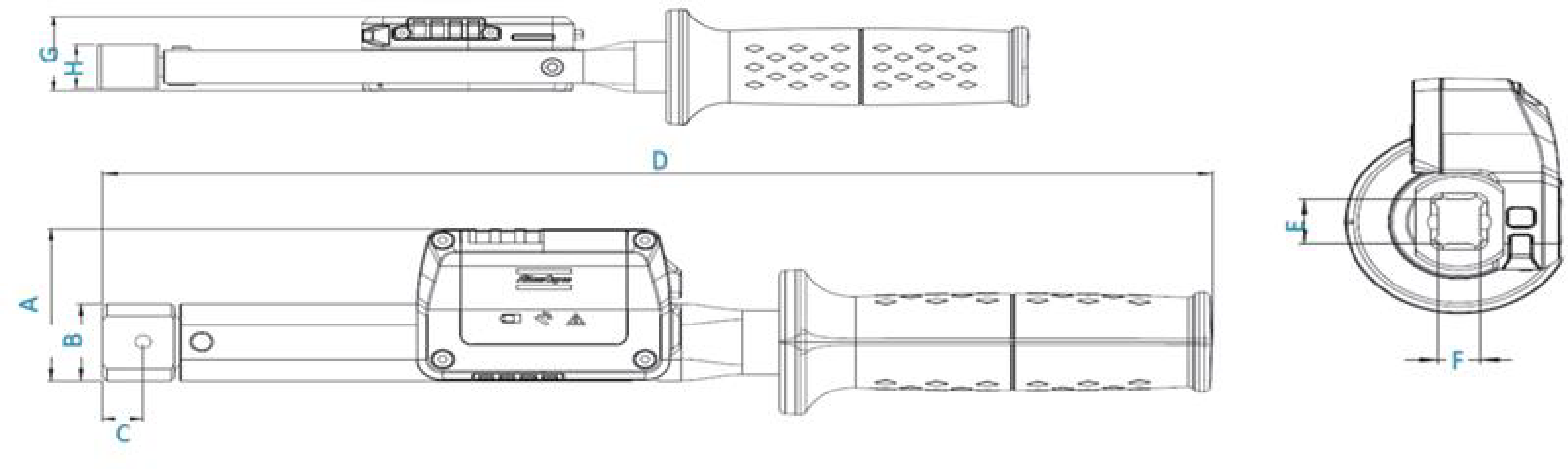
端接工具
MTRwrench 85 有一个兼容不同类型端接工具的标准驱动头 (9 x12 mm)。
要计算使用特定端接工具时施加到接头的实际扭矩,当在 Power Focus 6000/Power Focus 8 上配置拧紧程序时,请在 MWR 拧紧步骤的工具尺寸字段输入测得的端接工具长度(如下图所示)。
A | 在 Power Focus 6000/Power Focus 8 的 MWR 拧紧步骤中输入工具尺寸值。 | ||
有关如何配置拧紧程序的更多信息,请根据所使用的控制器参阅 Power Focus 6000 用户指南或 Power Focus 8 用户指南。
安装
初始配置
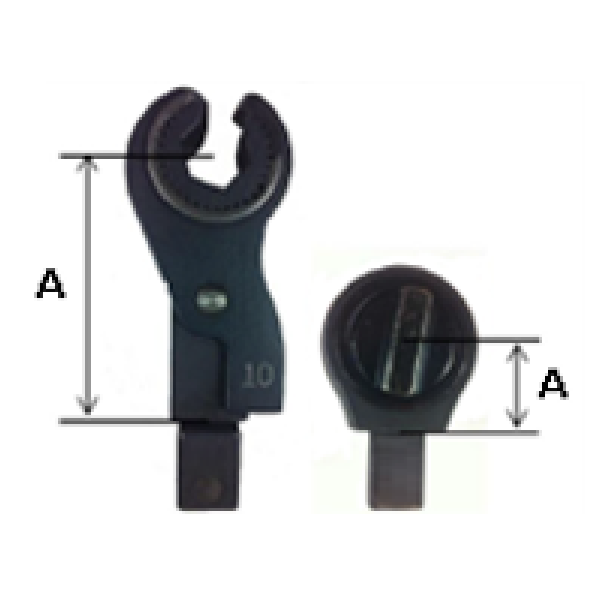
调节咔哒扭矩
将 MTRwrench 设置键插进并推入 MTRwrench 85 手柄的末端。

MTRwrench 设置键的零件号:8439004834。
顺时针旋转 MTRwrench 设置键可增大咔哒扭矩,逆时针则可减小咔哒扭矩。
扳手标签上标有扭矩范围。
将扳手连接到 MWR-KIT
有关如何启用和管理 MTRwrench 85 与 MWR-KIT 之间的连接的信息,请参阅 MWR-KIT 产品说明。
操作
配置说明
配置拧紧程序
MTRwrench 85 拧紧程序可通过 Power Focus 6000 或 Power Focus 8 进行配置和管理。
要与 Power Focus 通信并接收拧紧程序,必须先将 MTRwrench 85 与连接到 Power Focus 的 MWR-KIT 相连。
如果在操作过程中 MTRwrench 85 超出了无线电范围,扳手将继续按照 Power Focus 指定的最后一个拧紧程序工作,并可存储多达 10000 个结果。一旦 MTRwrench 85 回到无线电范围内,Power Focus 就会检索收集到的结果,并通报在超出范围期间对指定拧紧程序所做的任何潜在更改。
有关如何启用和管理设备之间通信的更多信息,请参阅 MWR-KIT 产品说明。
有关如何配置拧紧程序的更多信息,请根据所使用的控制器参阅 Power Focus 6000 用户指南或 Power Focus 8 用户指南。
拧紧策略
本部分概述了可用于配置拧紧程序以操作 MTRwrench 85 的拧紧策略。
有关如何配置拧紧程序的更多信息,请根据所使用的控制器参阅 Power Focus 6000 用户指南或 Power Focus 8 用户指南。
扭矩控制策略
扭矩控制策略帮助操作员在没有任何角度读数的情况下达到所需的目标扭矩。
定义此策略的主要参数如下:
参数 | 描述 |
|---|---|
咔哒扭矩* | 扭距目标值。 |
拧紧程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限值。 |
最大扭矩 | 扭矩上限值。 |
带星号的参数为必选参数。
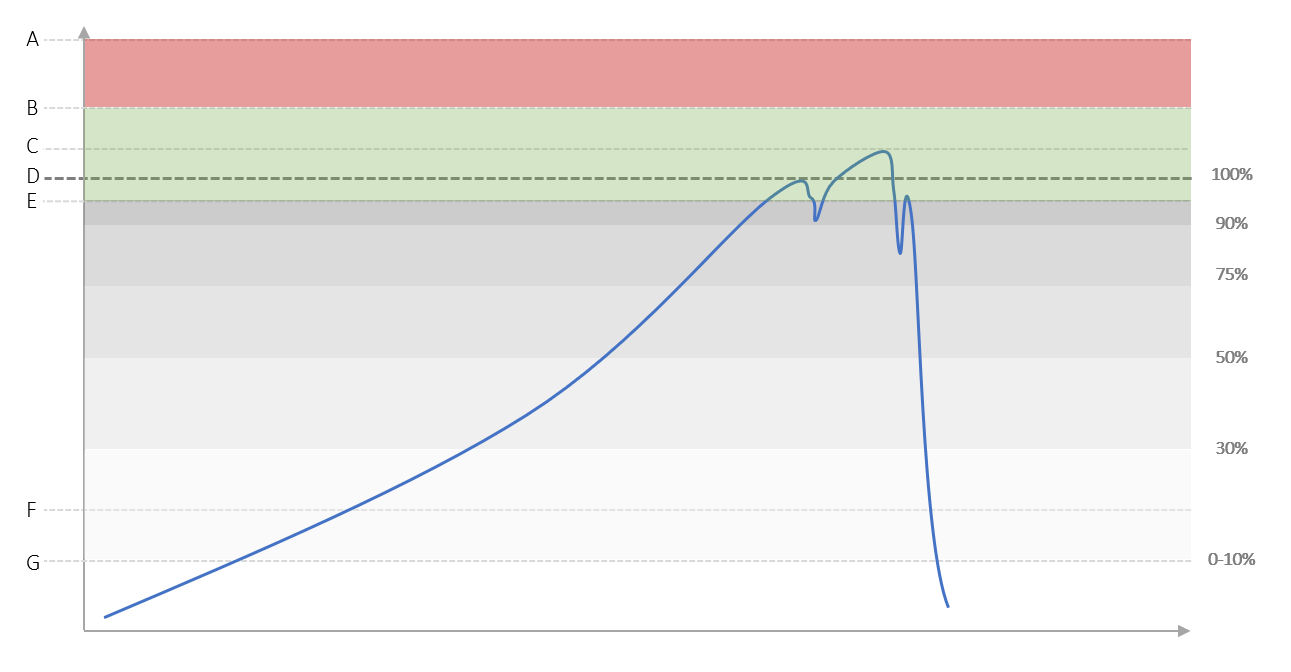
A | 更换螺钉 | E | 最小扭矩 |
B | 最大扭矩 | F | 触发器扭矩 |
C | 最终扭矩 | G | 拧紧程序开始 |
D | 咔哒扭矩 |
如果咔哒声扭矩在为所选拧紧程序定义的扭矩上限和下限值范围内,则结果正常。
有关如何配置拧紧程序的更多信息,请根据所使用的控制器参阅 Power Focus 6000 用户指南或 Power Focus 8 用户指南。
扭矩控制/角度监视策略
扭矩控制/角度监视策略帮助操作员在监视角度的同时达到所需的目标扭矩。
定义此策略的主要参数如下:
参数 | 描述 |
|---|---|
拧紧程序开始 | 拧紧操作开始时的扭矩值。 |
最小扭矩 | 扭矩下限值。 |
最大扭矩 | 扭矩上限值。 |
咔哒扭矩* | 扭距目标值。 |
触发器扭矩 | 开始角度测量时的扭矩值。 |
最小扭矩* | 角度下限值。 |
最大角度* | 角度上限值。 |
带星号的参数为必选参数。
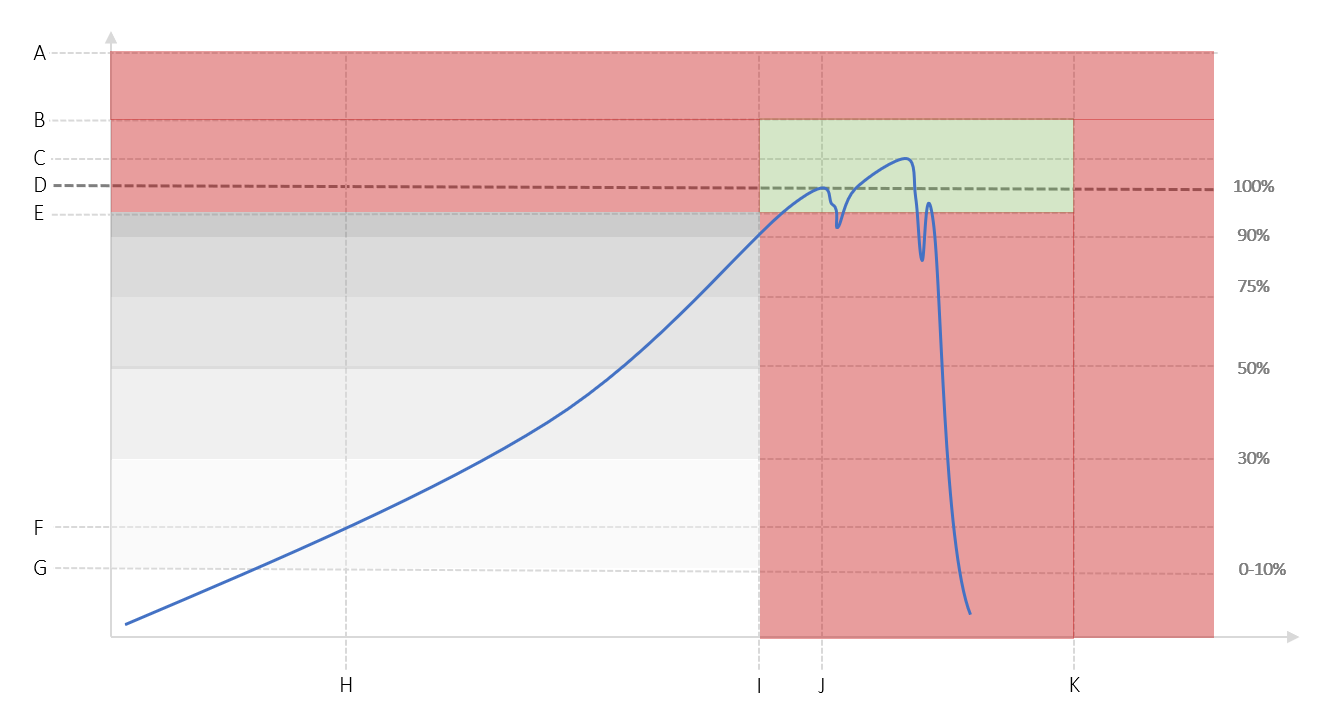
A | 更换螺钉 | G | 拧紧程序开始 |
B | 最大扭矩 | H | 角度测量开始(在触发扭矩时) |
C | 最终扭矩 | I | 最小角度 |
D | 咔哒扭矩 | J | 咔哒点处的角度 |
E | 最小扭矩 | K | 最大角度 |
F | 触发器扭矩 |
如果满足以下条件,则结果正常:
咔哒扭矩处于为所选拧紧程序定义的扭矩上限和下限值范围内。
和
咔哒点处的角度处于为所选拧紧程序定义的角度上限和下限值范围内。
有关如何配置拧紧程序的更多信息,请根据所使用的控制器参阅 Power Focus 6000 用户指南或 Power Focus 8 用户指南。
操作说明
人体工学指导准则
通读此一般人体工学指导准则列表时考虑您的工作台,找出在姿势、组件放置或工作环境方面可以改进的地方。
请频繁地间歇并更换作业位置。
根据需求和工作任务调整工作台区域。
通过确定需要放置零件和工具的位置调整出方便的范围,避免静态运功。
使用工作台设备,例如适合工作任务的桌椅。
避免作业位置高于肩部水平线或在装配操作期间静态持握工具。
在肩部水平线以上位置作业时,通过减轻工具重量来减少静态的肩部肌肉负担,例如使用扭矩臂、软管卷盘或重量平衡器。您也可以通过在近身位置持握工具来减轻静态的肩部肌肉负担。
经常休息。
避免肩部或腕部使用极端姿势,尤其在需要使用一定力量的操作过程中。
调整出方便的视野,使眼睛和头部的运动最少。
处理工作任务时使用适当的照明。
处理工作任务时选择适当的工具。
在嘈杂的环境中,请使用护耳设备。
使用高质量插入式工具和消耗品以最大限度减少暴露于过度振动的情况。
尽量减少在反作用力情况下的暴露。
切割时:
如果切割轮弯曲或者未正确予以引导,则切割轮可能会卡住。务必针对切割轮使用正确的法兰,并在操作过程中避免弯曲切割轮。
钻孔时:
当钻头打穿时,钻孔机可能会停转。如果停转扭矩高,请使用支撑手柄。安全标准 ISO11148 第 3 部分建议,对于枪柄式工具使用可吸收 10 Nm 以上反作用扭矩的设备,对于直柄式工具,使用可吸收 4 Nm 以上反作用扭矩的设备。
使用直接驱动螺丝刀或扳手时:
反作用力取决于工具的设置和连接件的特性。力量和姿势决定了操作员可以承受的反作用力大小。调整扭矩设置,以适合操作人员的力量和姿势,如果扭矩过高,则使用扭矩臂或反作用杆。
在多尘环境中,请使用除尘系统或戴口罩。
开启扳手
在 MTRwrench 85 人机界面的背面,拉开电池盒门上的锁杆,然后打开门。
将电池插入电池盒。
确保系带边缘可见,以方便取出。
关闭电池盒门。
确保系带边缘留在里面。

一旦 MTRwrench 85 开启,人机界面上的进度 LED开始闪烁白光  ,这表明 MTRwrench 85 需要调零。
,这表明 MTRwrench 85 需要调零。
人机界面上的无线电通信 LED 开始闪烁  ,表明 MTRwrench 85 无线通信开启。
,表明 MTRwrench 85 无线通信开启。
关闭扳手
在 MTRwrench 85 人机界面的背面,拉开电池盒门上的锁杆,然后打开门。
拉动系带边缘,将电池从电池盒中取出。
关闭电池盒门。
确保系带边缘留在里面。

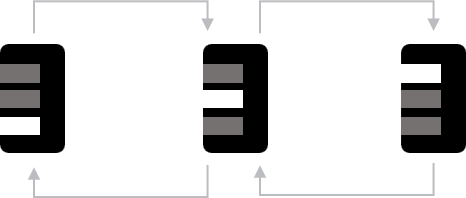
执行调零
以下情况需要进行调零:
开启 MTRwrench 85 后。
传感器轻微过载后。
要执行调零,请按以下步骤操作:
将 MTRwrench 85 放入充电架中。
松开扳手,在调零完成之前不要再触碰它。
调零过程中,进度 LED 依次开启和关闭(如下图所示):
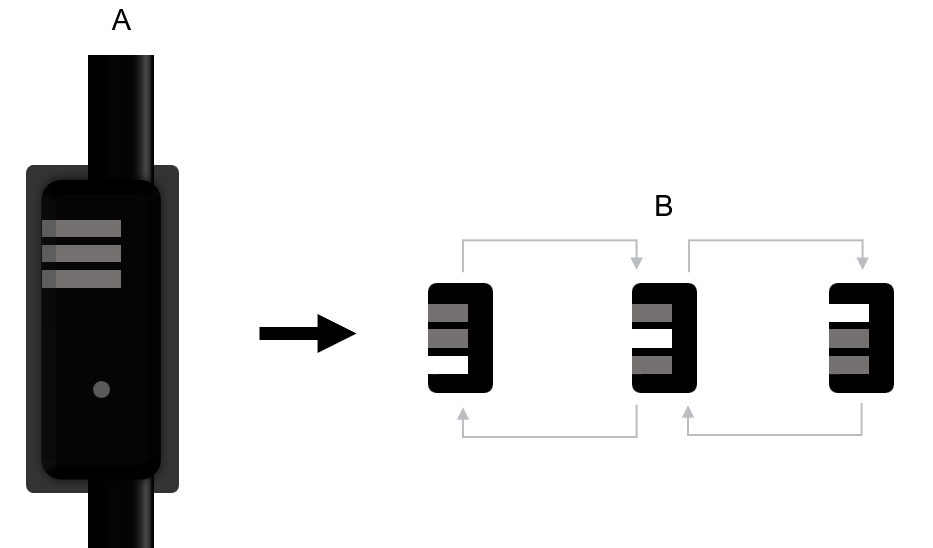
A
充电架内扳手的俯视图。
B
调零过程中,进度 LED 行为表示。
如果调零成功,进度 LED 关闭。
抓握扳手
正确抓握:
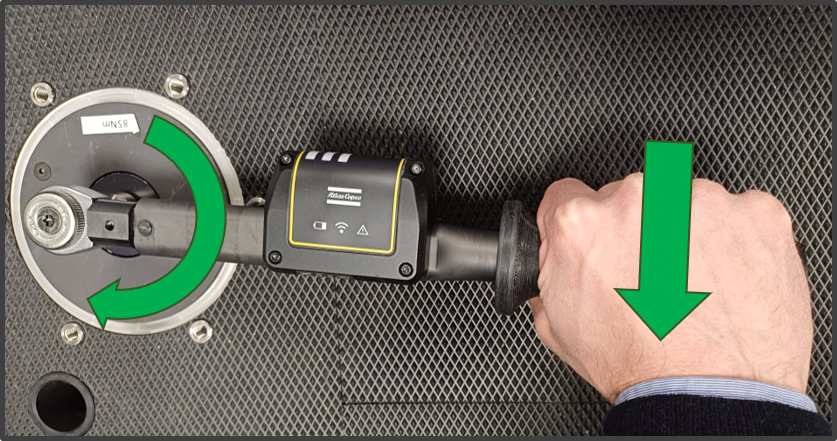
以均匀的力度拧紧。
执行拧紧时,握住 MTRwrench 85 的手柄中部。
仅在拧紧方向施力。
施加到扳手上的力必须由单手操作,均匀、平行,持续到工具发出咔哒声为止。
保持一定的拧紧速度,以便在 MTRwrench 85 发出咔嗒声后立即停止拧紧。
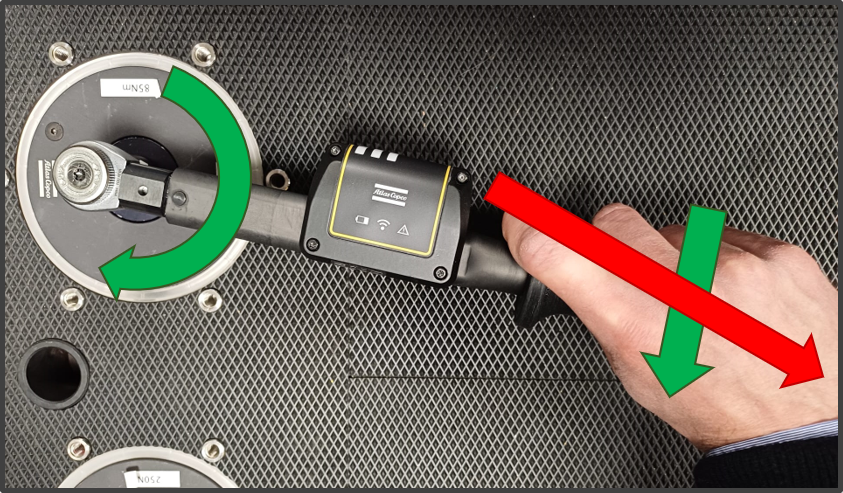
错误抓握:
自动释放(发出咔嗒声)后,请勿对扳手施加任何力。
除拧紧方向之外,请勿从任何方向对扳手施力。
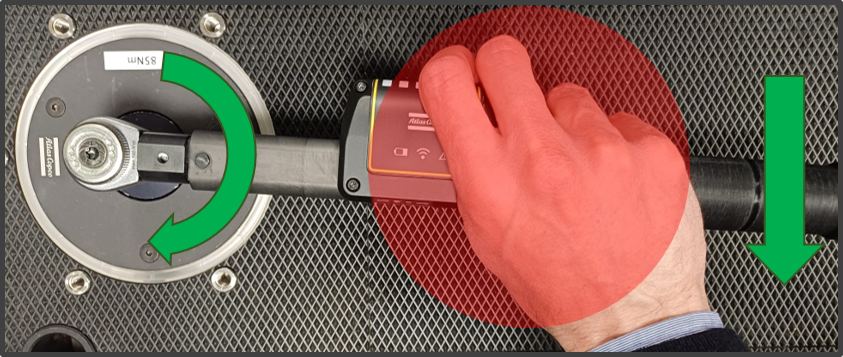
在拧紧操作过程中,请勿触摸 MTRwrench 85 机身。将拇指定位在管上会改变咔哒值!

在拧紧操作过程中不要握住 MTRwrench 85 的电池盒。
运行拧紧操作
将 MTRwrench 85 通过 MWR-KIT 连接到 Power Focus 6000/Power Focus 8。
在 Power Focus 上,配置拧紧程序并分配任务到 MTRwrench 85。
当 MTRwrench 85 收到任务且扳手准备就绪时,人机界面上的工作就绪 LED 亮起
 。
。将所需的端接工具安装到扳手上,然后执行拧紧。
拧紧进行时,工作就绪 LED 熄灭 。
。一旦 MTRwrench 85 达到咔哒点,即松开扳手。
MTRwrench 85 最多可以存储 10000 个结果。如果扳手被关闭,或超出无线电范围,一旦 MTRwrench 85 再次开启,或回到无线电范围内,Power Focus 就可以检索结果。
维修
维护说明
维修建议
建议定期进行预防性维护。请参见预防性维护的详细信息。如果产品工作不正常,请勿运行并对其检查。
如果未包含预防性维护的详细信息,须遵守一般操作指南:
彻底清洗相应的零部件
更换任何故障或磨损零部件
清洁
保持 MTRwrench 85 清洁。
使用后,用软布和软性油/脂表面清洁剂清除 MTRwrench 85 上的任何油脂痕迹。不要使用腐蚀性或磨蚀性清洁剂。
使用防静电清洁布清除 MTRwrench 85 上的灰尘。
在清洁 MTRwrench 85 时避免使用强力洗涤剂。
使用电接触清洁溶液清洁 MTRwrench 85 的触点。
回收
环境法规
当产品完成任务后,须妥善进行回收。按照当地法律的规定拆卸该产品并回收组件。
电池应由您国家的电池回收组织妥善处理。
回收说明
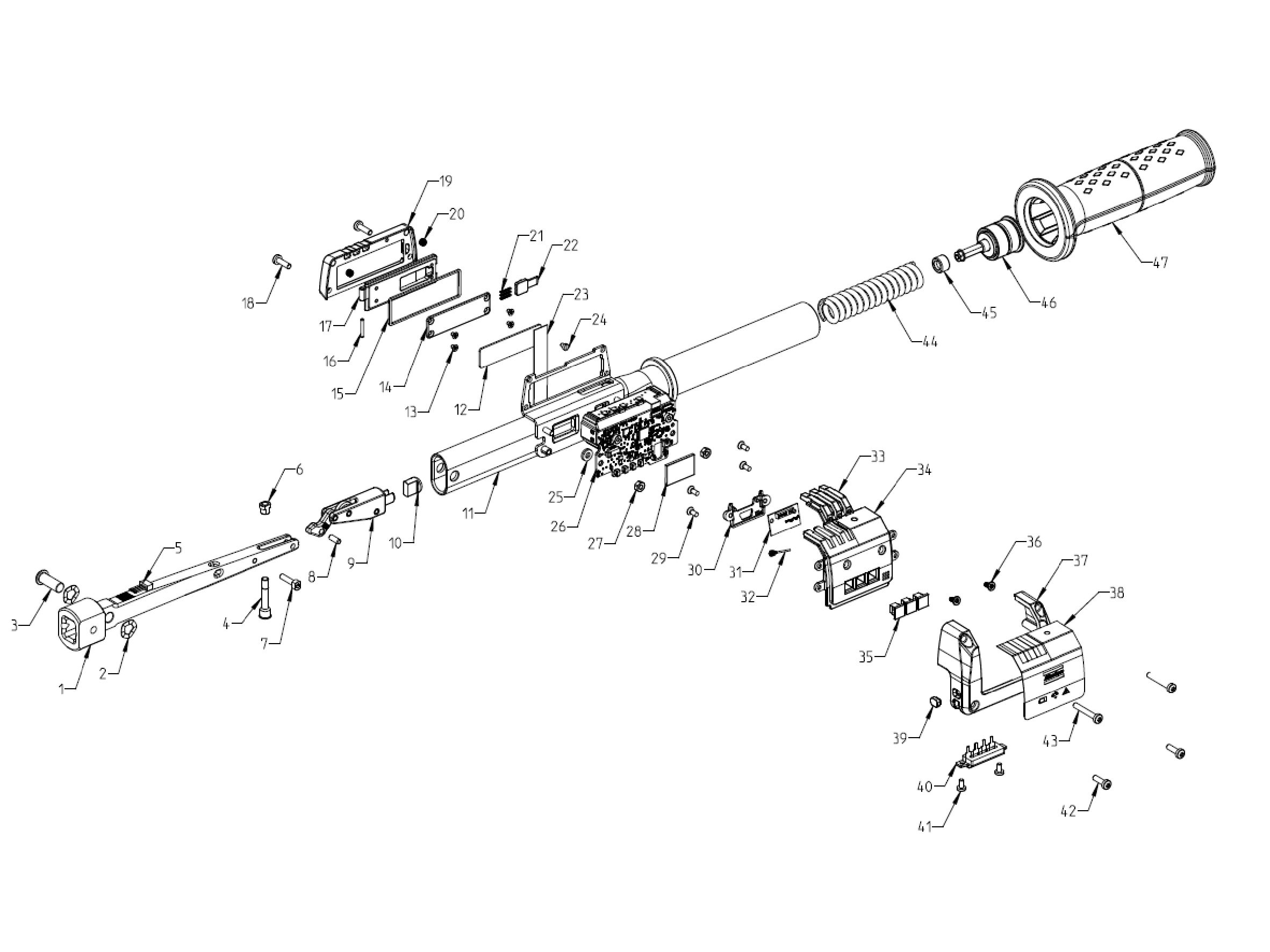
位置 | 部件 | 以下列形式再利用 |
|---|---|---|
1 | 传感器 | 混合废物 |
2 | 垫圈 | 铜 |
3 | 引脚 | 钢 |
4 | 引脚 | 钢 |
5 | 电缆 | WEEE |
6 | 螺母 | 钢 |
7 | 螺丝 | 钢 |
8 | 引脚 | 钢 |
9 | 运动链 | 钢 |
10 | 垫片 | 塑料 |
11 | 管 | 钢 |
12 | 胶带 | 钢 |
13 | 螺丝 | 钢 |
14 | 面板 | 钢 |
15 | 垫圈 | 橡胶 |
16 | 引脚 | 钢 |
17 | 门 | 钢 |
18 | 螺丝 | 钢 |
19 | 封罩 | 铝 |
20 | 螺纹护套 | 钢 |
21 | 弹簧 | 钢 |
22 | 按钮 | 钢 |
23 | 胶带 | 塑料 |
24 | 螺丝 | 钢 |
25 | 垫片 | 钢 |
26 | 电子板 1 | 混合废弃物 |
27 | 垫圈 | 钢 |
28 | 屏蔽 | 钢 |
29 | 螺丝 | 钢 |
30 | 电子支架 | 塑料 |
31 | 电子板 2 | WEEE |
32 | 电缆 | WEEE |
33 | 导光板 | 塑料 |
34 | 封罩 | 塑料 |
35 | 导光板 | 塑料 |
36 | 螺丝 | 钢 |
37 | 封罩 | 铝 |
38 | 标签 | 塑料 |
39 | 导光板 | 塑料 |
40 | 连接器 | WEEE |
41 | 螺丝 | 钢 |
42 | 螺丝 | 钢 |
43 | 螺丝 | 钢 |
44 | 弹簧 | 钢 |
45 | 垫片 | 塑料 |
46 | 调节系统 | 钢 |
47 | 手柄 | 塑料 |