简介
在本部分,您可以找到有关产品的基本信息以及主题中使用的格式约定。
一般数据保护条例(GDPR)
本产品提供了处理个人身份信息的可能性,例如系统用户名、角色和 IP 地址。这种处理能力的目的可能是通过可追溯性和适当的访问管理来加强质量控制。
如果您决定处理个人数据,您需要了解并遵守相关的个人数据保护规则,包括 EU GDPR 以及任何其他适用的指令和法规。对于您对本产品的任何使用,阿特拉斯·科普柯不承担任何责任。
责任和警告
责任
在工作环境下,许多情况可能影响拧紧流程,为此须对结果进行验证。在此,我们要求用户遵守相关标准和/或法规,在出现可能影响拧紧结果的情况后,检查安装的扭矩和旋转方向。此类情况的示例包括但不限于:
工具系统初始安装
更改部件批次、螺栓、螺钉批次、工具、软件、配置或环境
更改通风或电气连接
更改管路人体工程学特性、流程、质量程序或操作法
更换操作员
任何影响拧紧流程结果的其他变更
检查应:
确保未因发生的影响情况改变接头状况。
在设备初始安装、维护或修理后实施。
至少在每次换班后检查一次或以合适的频率进行检查。
警告
关于用户指南
本用户指南介绍了如何使用 IXB 软件设置和配置 IXB 工具。
修订历史
文档修订 | IXB 软件版本 | 变更内容 |
|---|---|---|
1.0 | 3.3 | 第一版 |
目标组
本用户指南适用于使用 IXB 软件配置或操作 IXB 工具的任何人。
前提条件
有兴趣进一步了解 IXB 软件的任何人均可从阅读本用户指南中受益。
为了全面理解用户指南中的技术方面,建议执行以下操作:
了解拧紧技巧
使用 Power Focus 6000 的体验
有关 Power Focus 6000 的更多信息,请参阅 Power Focus 6000 用户指南。
规则
为了增强用户的了解,本文档中使用了某些格式约定。所使用的格式约定列出如下。
元素 | 符号 | 说明 | 输出 |
|---|---|---|---|
一般重点 | 在程序工作区中。 | 使某些文本元素脱颖而出,或突出显示。 | 文字为粗体 |
图形用户界面 (GUI) 项目 | 选择功能按钮。 | 对在图形用户界面 (GUI) 屏幕上找到的项目的任何引用(例如:命令按钮、图标名称和字段名称)。 | 文字为粗体 |
图形用户界面 (GUI) 路径 > | 通常,在图形用户界面 (GUI) 的顶部。 | 导航辅助工具,可在图形用户界面 (GUI) 中跟踪位置。 | 例如:控制器 > 程序 > 编辑 |
用户输入 | 输入程序的说明。 | 用户输入的任何文本 | 文字为粗体 |
文件名 | 输入导出的文件名。 | 文件被导出或导入系统中 | 文字为粗斜体 |
变量和参数名称 | 输入导出的名称。 | 变量和参数名称(非值)。 | 文字为斜体 |
变量和参数值 | 输入导出的值。 | 变量和参数值。 | 文字为粗体大写 |
系统输出 | Client.Domain.Models.ExportImportConfiguration | 系统输出的任何文本。 | 文字为等宽字体 |
外部链接 | 指向具有与文档或主题内容相关的信息的外部站点的链接。这些可能包括:
| 可选文本到外部站点 | |
内部文档链接 |
如果可用,这些链接将显示在文本下方。 | 可选文本到内部内容 |
系统概述
制造系统可以由图中的功能块组成:
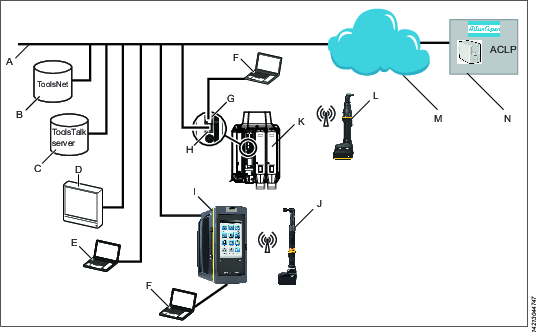
A | 工厂网络。 | H | 控制器工厂端口:连接至工厂网络。 |
B | ToolsNet 服务器:用于存储拧紧结果和进行统计分析。 | I | Power Focus 6000 控制器:与手持工具一起使用。 |
C | ToolsTalk 2 服务器:用于控制器和 IXB 工具的配置和参数设置。 | J | 手持电池工具:使用无线连接到控制器。 |
D | 工业计算机(IPC):可用作 ToolsTalk 2 和 ToolsNet 服务器的客户端。 | K | PF6 Flex 控制器:与夹具工具一起使用。 |
E | 连接到工厂网络的便携式计算机:可用作 ToolsTalk 2 和 ToolsNet 服务器的客户端。 | L | IXB 手持电池工具:使用无线连接到工厂网络。 |
F | 服务电脑:可以连接到控制器或 IXB 工具的服务端口。 | M | 互联网云。 |
G | 控制器服务端口:可用于连接服务电脑。 | N | Atlas Copco 许可门户(ACLP):位于 Atlas Copco,为功能管理系统(FMS)中的许可功能提供支持。 |
用户界面
主菜单
主菜单包含以下项目:
菜单项 | 说明 |
|---|---|
 | 拧紧 拧紧菜单显示了存储在工具中的现有拧紧程序列表。选择单个程序将打开不同的菜单,以配置和设置所选拧紧程序的参数。 |
 | 批次序列 批次序列是各种组合中一个或多个重复性拧紧程序。可以在批次序列菜单中创建和配置批次序列。 |
 | 源 来源菜单列有适用的选项,可通过不同硬件输入的数字控制所选的拧紧程序或批次序列。 |
 | 配置 在此菜单中,可以配置以下内容:
|
 | 集成控制器工具 该菜单包括以下项目:
此菜单还包括用于软件更新和配置参数导出/导入的功能。 |
 | 报告 显示最新的拧紧结果、事件和 NOK 比。 |
 | 设置 此菜单用于设置特定设置,例如:
|
 | 许可证分配 此菜单提供当前许可证状态和许可证来源的概述。 |
 | 帮助 帮助菜单包含 IXB 软件用户指南。 |
图标
下表概述了用户界面中可用的图标和按钮:
图标 | 名称 | 说明 |
|---|---|---|
 | 上一页 | 返回之前的视图。 |
 | 原始位置 | 进入主菜单屏幕。 |
 | 转至结果 | 进入实时结果屏幕。 |
 | 挂锁 | 打开一个 PIN 码对话框。 |
 | 事件 | 显示最新的拧紧事件。在设置菜单中定义要在事件配置中显示的事件。 |
 | 验证 | 根据工具值验证拧紧参数。 |
 | 添加 | 添加一个项目。 |
 | 删除 | 删除项目。 |
 | 协议状态 | 显示状态协议弹出窗口,其中显示开放协议信息。 |
 | 注意 | 表示参数配置错误的符号。 |
安装和升级
在本部分,您可以找到有助于产品初始安装或从一个版本升级到另一个版本的信息。
安装限制
兼容性矩阵
IXB 软件 | ToolsTalk | ToolsNet |
|---|---|---|
3.3 | 2.14 | 8.14 |
Web 浏览器要求
建议将以下 Web 浏览器用于 IXB 软件用户界面:
Firefox
Google Chrome
Microsoft Edge
许可证
功能许可证通过功能管理系统 (FMS) 进行管理。这允许客户通过动态许可方案来定制工具功能以满足其特定需求。
可以为单个功能或功能集合获取许可证,并且可以跨多个虚拟站点部署许可证。许可证可在不再需要时返回到池中。
许可证可从 Atlas Copco License Portal (ACLP) 下载并通过 ToolsTalk 进行管理/分发,也可以存储在 FMS Portable(USB 驱动器)上用来插入工具。
请注意,本文件不涉及在 ACLP 中创建和管理客户帐户。请联系当地的 Atlas Copco 代表以获取更多信息。
有三种类型的许可证:
虚拟站点类型
修复了在单个包中捆绑在一起的特征集合。除此之外,虚拟站点类型许可证确定可以运行哪些工具,可以使用多少程序和序列,哪些拧紧策略可用以及可以执行的报告类型。每个虚拟站点类型中包含的特征是通常彼此结合使用的特征,或者具有需要包中存在其他特征的内部依赖项的特征。虚拟站点类型完全分配给虚拟站点。然后,虚拟站点可以使用虚拟站点类型中包含的所有特征。为了能够执行拧紧,必须为虚拟站点分配一个虚拟站点类型的许可证。根据许可证类型,将启用或阻止各种拧紧选项。
虚拟站点特征
单个功能可作为单个许可证购买,以补充虚拟站点类型许可证。
控制器特征
这些特征包括软 PLC 和步进同步等,它们被分配给控制器,一旦分配,就可以被该控制器上的所有虚拟站点使用。
许可证源
可以从几个不同的源获取工具上使用的许可证。同时使用的源数量限制为 10 个(10 个 FMS Portable 源,或 1 个 License Server (TT2) 源加 9 个 FMS Portable 源)。如果在达到源限制 (10) 时要从源添加许可证,则需要从工具中删除一个源的所有许可证,以便为另一源的许可证腾出空间。
源概览选项卡(源分配 > 源概览)提供了工具上安装的许可证的概览以及它们是从何处安装的。此处最多可显示 10 个不同的源,每个源都分配给 FMS P(适用于 FMS Portable 或加密狗)或 License Server (TT2)。
选择任何许可证源将显示该源的详细许可证源信息。列出的信息包括源名称和类型以及每个类别(虚拟站类型、虚拟站特征和控制器特征)中许可证的数量和类型。
即使没有安装的许可证,也可以完成受许可证控制的功能的配置,例如,拧紧程序的配置。也可以将这些功能分配给工具或虚拟站点。但是,在没有有效许可证的情况下运行功能将需要安装适当的许可证。
许可证实施分两个阶段执行:分配和运行时(按下触发器)。如果未安装许可证的功能已分配给虚拟站点,则将在用户界面的工具或任务部分出现一个红色的感叹号(取决于缺少的是什么)。如果启动了未安装许可证的功能,则会显示一个事件,通知缺少哪个许可证。如果没有安装正确的许可证,将无法继续。在大多数情况下,运行未经许可的特征会导致锁定工具。
在工具上安装许可证
请注意,许可证源同时限于一 (1) 个许可证服务器 (TT2) 和九个 FMS Portable(USB 加密狗)。许可证可以通过服务器 (ToolsTalk2) 或 FMS Portable 安装。如果达到许可证源限制,则需要从工具中删除一个源的所有许可证,以便从另一个源添加许可证。
每两小时都会针对许可证服务器检查现有许可证。如果在 14 天内未从许可证服务器获得任何响应,则将吊销受影响的许可证。当许可证即将到期时,用户也将收到警告。当许可证在 7 天内到期,用户将每两小时收到一次警告。如果未续订许可证,它们将过期,受影响的功能将不再可用。
从服务器安装许可证
基于服务器的许可证通过 ToolsTalk2 分发。有关如何安装服务器许可证的说明,请参阅 ToolsTalk2 用户指南。
要使用 ToolsTalk2 启用许可证安装,必须在工具中配置正确的许可证服务器设置。
转到主菜单中的设置,然后在左侧窗格中选择服务器连接。
在 Atlas Copco 许可证管理器字段中,将开关设置为开。
插入正确的服务器端口和服务器主机 IP 地址(通常与 ToolsTalk2 的 IP 地址相同)。
选择应用。
从 FMS Portable(USB 加密狗)安装许可证
功能管理系统 (FMS) 使用特殊的 FMS Portable 设备在工具之间传递功能。USB 闪存驱动器既包含通用存储区,又包含受信任的存储区,该存储区只能由工具中的许可证管理器访问。将从 Atlas Copco 购买的功能项下载到通用存储区。第一次将 FMS Portable 插入带有许可证管理器的工具中时,将对文件进行检测和解码,并将功能项传输到只能从许可证管理器访问的受信任存储区域。
通过 USB 适配器电缆将 USB 加密狗连接到工具。

在安装许可证之前,请确保该工具已建立与工厂网络的无线连接。
USB 许可证管理窗口将出现。池一列将显示工具上来自所有源的的总许可证计数。FMS P 上可用一列显示此加密狗上可用的许可证,来自此 FMS P 一列显示已从此特定 FMS P 移到此工具的许可证数量。
选择要在工具上安装的许可证旁边的向左箭头。
FMS P 上可用一列中的数字将减 1,来自此 FMS P一列中的数字将加 1。
从工具中删除许可证
删除服务器上安装的许可证
有关删除服务器安装的许可证的说明,请参阅 ToolsTalk2 用户指南。
删除 FMS Portable 安装的许可证
通过 USB 适配器电缆将 USB 加密狗连接到工具。
在删除许可证之前,请确保该工具已建立与工厂网络的无线连接。
如果 USB 许可证管理器窗口不可见,请转到主菜单中的许可证分配。
选择窗口右上角的 USB 图标。USB 许可证管理器对话框出现。
选择要从工具中删除的许可证旁边的向右箭头。
可以从工具中删除分配给虚拟站点的许可证。但是,结果是虚拟站点无法使用。
升级
软件版本
可以同时在工具中安装两个软件版本。在多个工具上执行升级时,安装第二个软件版本非常有用。当生产准备好切换到升级的软件时,可以从 IXB 软件用户界面或通过 ToolsTalk 2 激活新的软件版本。
更改软件版本不会转移工具配置或拧紧程序。
软件激活
该工具可以存储两个已安装的软件版本。通过使用软件激活,可以选择要使用的软件版本。
转到主菜单中的集成控制器工具,然后在左侧窗格中选择软件。
在软件激活窗口中选择当前或已存储的。
该工具将自动重启,以使激活生效。
更新软件版本
转到集成控制器工具菜单,然后在左侧窗格中选择软件。
转到软件更新字段,然后选择浏览。
浏览并选择包含适用软件的 zip 文件,然后按照说明完成安装。
配置
在本部分,您可以找到有关如何创建、修改和验证产品设置的详细信息。
配置选项
工具的配置和设置可以通过以下方式进行:
IXB 软件:工具可以通过 USB 电缆直接连接到 PC。如果工具连接到无线网络并且其 IP 地址是已知的,则可以从网络上的任何位置的计算机访问控制器。
ToolsTalk 2:如果工具连接到 ToolsTalk 2 服务器,则 ToolsTalk 2 客户端 (PC) 可以通过 ToolsTalk 2 访问所有连接的工具和控制器。可以访问 IXB 工具以及 Power Focus 6000 控制器和 Flex 控制器。
站点设置模式下的 ToolsTalk 2:无需安装服务器即可在 PC 上提供 ToolsTalk 2 界面。计算机连接到控制器服务端口,并一次访问一个控制器。
控制器:这适用于具有触摸屏的 Power Focus 6000 控制器。可以配置控制器,无论它是否连接到网络。
本用户指南涵盖 IXB 软件。有关 ToolsTalk 2 和 Power Focus 6000 的信息,请参阅 ToolsTalk 2 用户指南和 Power Focus 6000 用户指南。
开始
为了更好地了解系统,本部分提供了快速指南,涵盖使用 Tensor IXB 工具和 IXB 软件 所需的基本步骤。本节并未解释系统的各项功能,但重点介绍了最常用的基本功能。
将工具连接到 PC 并访问用户界面。在工具和网络之间建立无线连接。
定义一个包含拧紧的所有相关参数(例如目标角度和目标扭矩)的拧紧程序。
如果适用,请创建一个批次序列。可以将一个或几个拧紧程序添加到批次序列中,以一系列拧紧程序进行工作。例如,批次序列可以为一个拧紧程序的特定拧紧次数或不同拧紧程序的序列。
将任务分配给工具的虚拟站点。此任务既可是拧紧程序、批次序列,也可是指定的数字输入(如从条形码枪输入)。
访问 IXB 软件用户界面
取下工具 USB 连接端口的盖子。
将工具连接到 PC 的 USB 端口。
打开一个 Web 浏览器,然后输入 IXB 软件用户界面的地址:169.254.1.1。
要以无线方式访问用户界面,请参阅配置无线客户端一节中的说明。
创建拧紧程序
转到主菜单中的拧紧。
选择 + 图标。
在选择操作模式窗口中,选择拧紧。
打开属性窗口,然后为特定工具输入有效的最大扭矩限值。输入 Enter。关闭属性窗口。
打开右侧的步骤窗格,然后拖放步骤以创建拧紧程序。
在适用的每个步骤中设置监视器和限制,然后按 Enter 键。
拧紧程序必须配置一个拧松程序。
转到主菜单中的拧紧。
选择 + 图标。
在选择操作模式窗口中,选择拧松。
打开属性窗口,然后为特定工具输入有效的最大扭矩限值。输入 Enter。关闭属性窗口。
打开右侧的步骤窗格,然后拖放步骤以创建拧松程序。
在适用的每个步骤中设置监视器和限制,然后输入 Enter。
转到主菜单中的拧紧,然后从列表中选择一个拧紧程序。
通过选择箭头展开属性。
在常规设置下,选择拧松程序,然后在列表中选择一个拧松程序。输入 Enter。
将任务分配给虚拟站点
转到主菜单中的集成控制器工具。
在虚拟站点 > 任务下,选择选择任务。
从列表中选择一个拧紧程序。
使用拧紧选项卡
本节介绍了多步骤拧紧策略以及如何创建拧紧程序。
某些功能需要通过功能管理系统 (FMS) 分发的许可证。虽然可以在没有特定许可证的情况下配置特征,但分配和使用这些特征将需要在工具上安装正确的许可证。
多步骤拧紧策略
多步骤拧紧是分多步进行拧紧。步骤数和步骤类型因要进行的拧紧而异。多步拧紧程序可高度配置,包括监控功能和限制。总共十个步骤可以添加到一个多步骤程序中。
限制用于确保在出现意外情况时停止拧紧。例如,这些限制可测试确保未达到最大设定扭矩,或多步骤拧紧的部分不会花太长运行时间。每个步骤最多可各有 4 个限制。每个步骤有强制步骤限制和可选步骤限制。当将新步骤拖至多步骤程序时,将包含强制限制。
监控器用于验证是否根据规定进行拧紧。例如,它们可以为角度限值或扭矩限值。每个步骤最多可各有 8 个监控器。每个步骤有强制步骤监控器和可选步骤监控器。当将新步骤拖至多步骤程序时,将包含强制监控器。
多步骤配置用户界面
配置多步骤程序的用户界面可划分成三个主区:
顶部有一个包含多步骤拧紧程序属性的下拉菜单。在这里可设置程序名、总程序监控器和验证等一般属性。
右侧有三个选项卡,包含可用于构建多步骤程序的步骤、监视器和限制。如要使用任何项目,只需选择相应的选项卡,然后将列表中的项目拖至拧紧区。将项目拖放到程序的开始和结束之间(用于步骤),或拖放到具体步骤的顶部(用于监控器和限制),视其功能而定。
用户界面的主区由拧紧区组成。该区包括拧紧程序中的所有步骤。
步骤参数
以下步骤参数对于许多步骤类型都是通用的。参数在步骤属性窗口中设置,当在拧紧程序中选择一个步骤时显示该窗口。
参数 | 说明 |
|---|---|
名称 | 步骤名称。 |
旋转方向 | 每个拧紧步骤可正向运行,即:拧紧,或反向运行,即:将螺钉拧松一点。箭头指出该方向。很多拧紧步骤都有一个硬编码为正向的方向,如:拧紧以达到目标角度,或拧紧以达到目标扭矩。拧松以达到目标角度或拧松以达到目标扭矩等步骤的方向均自动被设为反向。 |
步骤类别 | 每个步骤都有一个选项来选择步骤类别。通过选择步骤类别,NOK 拧紧将在事件结果视图中列出,同时列出相关的详细状态以及对应的多步骤错误信息。如果没有做出选择,详细状态将被设为“未分类的多步骤错误”。相关详细状态可以自定义。 |
角度窗口 | 如果螺钉被拧紧至满扭矩,以及当它被拧紧至贴合点后旋转 30 度(或更小)时,连接将被视为硬连接。软连接是指拧紧至贴合点后旋转 720 度或更大角度。硬度参数定义变化率计算的角度窗口。连接越硬,角度窗口越小。 |
速度上升/加速(仅适用于 ToolsTalk 2) | 对于大部分步骤,可指定要达到目标速度应如何加速。可以有三种不同的设置:硬、软和手动。当步骤开始时,将使用定义的加速度。如果工具在步骤开始时已经以某种速度运行也不要紧,不管怎样,上升将被用于加速到步骤的目标速度。即使步骤开始时的速度高于或低于目标速度,情况也是如此。 |
速度上升 - 硬和软模式 |
|
速度上升 - 手动模式 |
|
使用变速 | 可以在速度将发生变化的步骤中定义 1-5 个角度触发器或扭矩触发器。 在一个步骤内,所有变速触发器都是基于同一个属性,即扭矩或角度。它们不能在一个步骤内混合。 扭矩触发器和角度触发器必须小于步骤目标,具体取决于步骤类型和触发器类型。 扭矩触发器和扭矩速度也可以根据工具的最大扭矩和最大速度进行验证。只要变速设置超出工具最大值或步骤最大值就会出现警告或错误指示。 扭矩触发器和角度触发器必须小于步骤目标,具体取决于步骤类型和触发器类型。 扭矩触发器和扭矩速度也可以根据工具的最大扭矩和最大速度进行验证。只要变速设置超出工具最大值或步骤最大值就会出现警告或错误指示。 拧紧程序出现警告可以将设置推送至工具,但是拧紧程序出现错误指示时不能推送。 |
制动类型 | 多步骤拧紧程序的制动行为可在程序中的两个可能位置进行控制:在拧紧方向反转之前的步骤中,和/或在拧紧程序的最后一步。在拧紧程序的其他位置,步骤的常规设置中将不提供制动参数。制动可被设为人体工学停止或惯性。惯性将完全制动工具,而人体工学停止将允许更加符合人体工学的减速拧紧。 惯性没有其他参数。 人体工学停止参数:
|
可用步骤概览
以下步骤可用于创建多步骤拧紧程序:
W – 等待
在这一步中,工具等待指定的时间量。等待时,工具不旋转。
工具等待一段指定的时间。如果保持位置被设为开启,在等待时间期间,工具位置将保持不动。
SR – 松开套筒
该步骤以速度 n 反向运行工具,直至达到目标角度。目标角度从步骤开始时测量。
该步骤只能作为多步骤拧紧程序的拧紧路径中的最后一步。但是,可以在此步骤后添加同步点。
参数 | 说明 |
|---|---|
目标角度 | 角度目标。 默认:3º,必须 > 0 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
速度 | 默认:60 rpm。 |
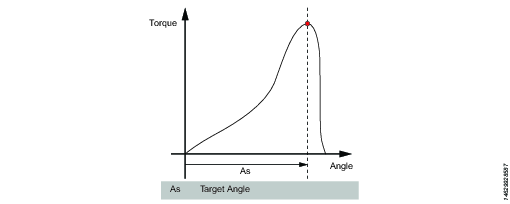
A – 拧紧以达到目标角度/拧松以达到目标角度
A – 拧紧至角度
该步骤运行工具直至达到目标角度。目标角度从步骤开始时测量。
A – 拧松至角度
该步骤以速度 n 反向运行工具,直至达到目标角度。目标角度从步骤开始时测量。
参数
参数 | 说明 |
|---|---|
目标角度 | 角度目标。必须 > 0。 |
速度 | 默认:60 rpm。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
制动器 (仅对 PF6 Flex 和 PF6 Stepsync 控制器有效)。 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
TrR – 拧松以释放触发器
该步骤反向运行至工具触发器被释放(松开)为止。它只能用作程序的最后一步。
参数 | 说明 |
|---|---|
速度 | 转速的数值;以 rpm 为单位。 |
速度上升类型 | 可选择速度上升的选项列表[硬、软、手动] |
TTTR – 拧紧以释放触发器
该步骤运行至工具触发器被释放(拧紧)为止。它只能用作拧紧程序的最后一步。
参数 | 说明 |
|---|---|
速度 | 转速的数值;以 rpm 为单位。 |
速度上升类型 | 可选择速度上升的选项列表[硬、软、手动] |
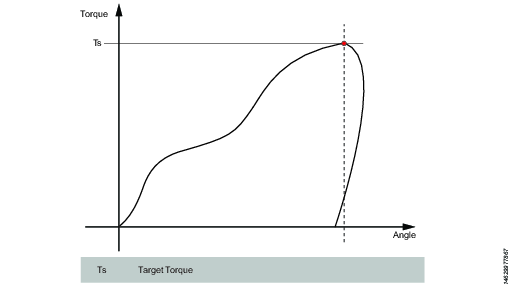
T – 拧紧以达到目标扭矩/拧松以达到目标扭矩
T - 拧紧至扭矩
该步骤以编程的速度正向运行工具直至达到目标扭矩。
参数 | 说明 |
|---|---|
目标扭矩 | 扭矩目标。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
制动器 (仅对 PF6 Flex 和 PF6 Stepsync 控制器有效)。 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
T - 拧松至扭矩
该步骤以速度反向运行工具。如要激活步骤,扭矩必须先超过目标扭矩的 110%。目标扭矩应设为正值。达到目标扭矩后,该步骤将运行直至扭矩降至目标扭矩以下。
参数 | 说明 |
|---|---|
目标扭矩 | 扭矩目标。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
制动器 (仅对 PF6 Flex 和 PF6 Stepsync 控制器有效)。 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
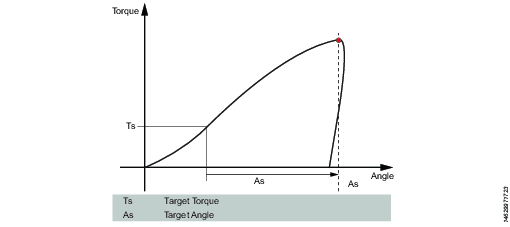
T+A – 拧紧以达到目标扭矩与角度
该步骤运行工具直至达到目标扭矩。它将从这一点继续运行一个附加的目标角度。
参数 | 说明 |
|---|---|
目标扭矩 | 扭矩目标。必须 > 0。 |
目标角度 | 角度目标。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
速度 | 默认:60 rpm。 |
制动器 (仅对 PF6 Flex 和 PF6 Stepsync 控制器有效)。 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
T|A – 拧紧以达到目标扭矩或角度
此步骤以速度 n 向前运行工具,直至达到第一个扭矩目标或角度目标。扭矩和角度测量从步骤开始处开始。
参数 | 说明 |
|---|---|
目标扭矩 | 必须 > 0。 |
目标角度 | 必须 > 0。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
制动器 (仅对 PF6 Flex 和 PF6 Stepsync 控制器有效)。 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
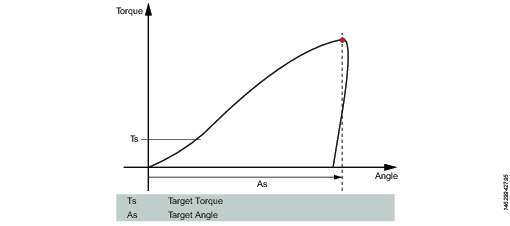
T&A – 拧紧达到目标扭矩和角度
以指定速度正向运行工具直至达到目标扭矩和目标角度。目标扭矩和目标角度必须设为 > 0。
参数 | 说明 |
|---|---|
目标扭矩 | 必须 > 0。 |
目标角度 | 默认:0.必须 > 0。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
制动器 (仅对 PF6 Flex 和 PF6 Stepsync 控制器有效)。 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
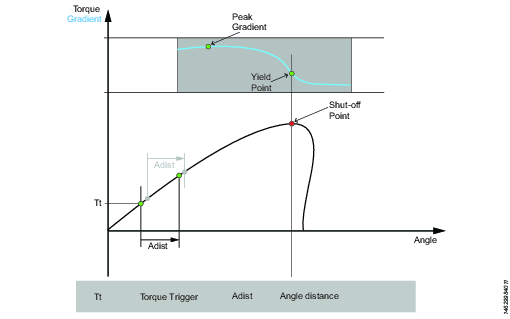
Y – 根据屈服度拧紧
该策略正向运行工具直至检测到屈服点为止。通过从扭矩超过触发扭矩水平时监控扭矩变化率来找到屈服点,触发扭矩水平根据扭矩和角度距离测量求出。角度距离参数根据指定连接硬度设置。
设置变化率角度窗口(用于硬连接、软连接或角度窗口的手动设置)。如果选择了手动,必须设置角度窗口。如果螺钉被拧紧至满扭矩,以及当它被拧紧至贴合点后旋转 30 度(或更小)时,连接将被视为硬连接。软连接是指拧紧至贴合点后旋转 720 度或更大角度。硬度参数定义变化率计算的角度窗口。连接越硬,角度窗口越小。
参数 | 说明 |
|---|---|
斜率角度窗口 | 指定角度窗口:
|
角度窗口 | 当变化率角度窗口设置为手动时可用。必须 > 0 且 <= 100。 |
触发器扭矩 | 角度测量在该触发器处开始。必须 > = 0 且 < 工具最大扭矩。 |
减震 | 正在计算变化率时的频率。必须 > 0 且 <100 且 <角度窗口。 |
屈服点百分比 | 必须 >= 20 % |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
扭矩滤波器类型 | 滤波器类型:
|
截止频率 | 当扭矩滤波器类型设置为低通时需要指定:
|
样本数量 | 当扭矩滤波器类型设置为滑动平均值时需要指定:
|
制动器 (仅对 PF6 Flex 和 PF6 Stepsync 控制器有效)。 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
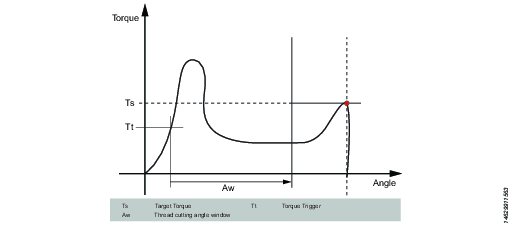
ThCT – 切割螺纹以达到目标扭矩
切割螺纹以达到目标扭矩功能可在所需的旋入扭矩大于旋入完成扭矩时启用拧紧,例如,当使用自攻螺纹(或自攻)螺钉拧紧金属薄层时。工具正向运行直至达到螺纹切割角度 (Aw)。当扭矩第一次超过螺纹切割触发扭矩 (Ttc) 时测量螺纹切割角度窗口。步骤从达到螺纹切割角度的点继续运行,直至达到目标扭矩 (Tt)。
参数 | 说明 |
|---|---|
目标扭矩 | 必须 > 0。 |
螺纹切割角度窗口 | 默认:0.必须 > 0。 |
触发器扭矩 | 角度测量在该触发器处开始。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
制动器 (仅对 PF6 Flex 和 PF6 Stepsync 控制器有效)。 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
RD – 旋入
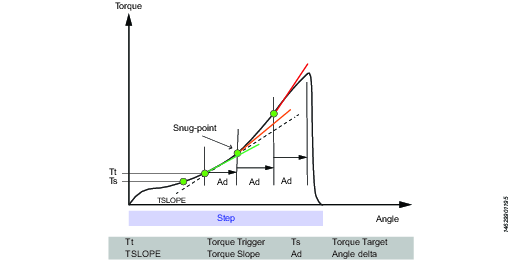
旋入步骤是拧紧的组成部分,该阶段从螺钉进入螺纹时开始,直到螺钉头刚好接触底面并达到贴合点为止。旋入期间所需的扭矩不会影响任何夹紧力。
此步骤以该速度正向运行工具,根据旋入类型、扭矩或贴合,步骤行为如下:
旋入类型:至扭矩:当找到指定目标扭矩时,步骤停止。
旋入类型:至贴合:贴合变化率计算在指定扭矩触发水平 Tt 处开始。如果没有设置扭矩触发器,在步骤开始处开始变化率计算。
斜率计算是在相隔 Ad 度的两个角度点之间进行的,计算公式如下:(Tn – Tn-1) / (An – An-1),一旦彼此之间的两个斜率大于 TSLOPE,就会找到贴合点。
参数 | 说明 |
|---|---|
旋入类型 | 至扭矩或至贴合。 |
目标扭矩 | 默认:“未设置”。必须 > 0。 |
速度 | 默认:60 rpm。必须 > 0。 |
速度上升类型 | 硬、软或手动。默认:硬。如果选择手动,速度上升字段打开。 |
速度上升 | 如果速度上升类型为手动,则此字段打开。默认:500 rpm/s。 |
触发器扭矩 | 如果旋入类型为至贴合,则显示触发器扭矩字段。 默认:“未设置”。必须 > 0。 |
Delta 角度 | 如果旋入类型为至贴合,则显示角度增量字段。 默认:"0"。必须 > 0。 |
扭矩率 | 如果旋入类型为至贴合,则显示扭矩率字段。 默认:"0"。必须 > 0。 |
制动器 (仅对 PF6 Flex 和 PF6 Stepsync 控制器有效)。 | 如果开启,工具将在达到目标时停止。 如果关闭,程序将在不停止工具的情况下直接进入下一步。 |
接合 (E)
该步骤以两个方向运行工具,直到套筒与螺钉啮合为止。假如如果不啮合则继续被设为是的话,继续该步骤直至达到目标扭矩或目标角度。如果在任意方向达到目标角度,方向被反转。通过输入最大啮合尝试次数限制搜索迭代。如果在任意方向达到目标扭矩,步骤将以 OK 状态完成。
Ext - 外部结果
外部结果是在通过外部数字信号(而非通过拧紧期间测得的扭矩或角度值)显示拧紧完成时使用的策略。外部信号可以通过可向工具提供数字信号的任意方式提供。
在发送信号时,结果视图(存入的数据)将显示在拧紧程序中提供的目标参数值(规定的扭矩值、角度值或文本字符串)。这些(扭矩和角度)值不代表实际的测量值,而仅是插入的文本。
参数 | 说明 |
|---|---|
扭矩 <目标扭矩> | 所需显示目标扭矩值的数值。比如,信号可以来自 Click Wrench 并显示 <目标扭矩>。 |
角度 <目标角度> | 所需显示目标角度值的数值。比如,信号可以来自 Click Wrench 并显示 <目标角度>。 |
文本 | 所需显示文本的字母数字字符串。例如:“已换油”。 |
不支持以下步骤:
步骤标签 | 名称 |
|---|---|
DI | 运行直至数字输入 - 不适用 |
DT | 拧紧至 DynaTork - 不适用 |
MWR | 机电扳手 - 不适用 |
WP | 扳手生产 - 不适用 |
WQ | 扳手质量 - 不适用 |
C | 离合器 - 不适用 |
CL | 离合器拧松 - 不适用 |
TM | 手动拧紧至扭矩 - 不适用 |
可用步骤监视器概览
步骤监控器用于验证是否根据规范实现拧紧,比如角度限值或扭矩。每个步骤有强制步骤监控器和可选步骤监控器。当将新步骤拖至多步骤程序时,将包含强制监控器。可选监控器是灵活的,可按需要添加到多步骤程序中。每个步骤最多可有 8 个监控器。
默认情况下,角度和峰值扭矩监视器会自动添加到多步骤拧紧程序的每个步骤中。
A – 角度
在该步骤,监控器测量监控期间达到的最大角度,并检查它是否介于上限和下限之间。角度测量在监控开始处开始,如果指定的话,则在扭矩第一次在监控期间超过触发扭矩的点处开始。
参数 | 说明 |
|---|---|
类型 | 共有四种角度类型:峰值角度(默认)、峰值扭矩处的角度、切断角度和结束角度。 |
触发器扭矩 | 角度测量在该触发器处开始。 |
下限 | 可接收的最小角度。 |
上限 | 可接收的最大角度。 |
YA – 屈服角度
此监控器从屈服点测量达到的峰值角度并检查峰值角度是否处于限值内。
此步骤监视器不适用于 STB 工具。
参数 | 说明 |
|---|---|
斜率角度窗口 | 指定角度窗口:
|
角度窗口 | 当变化率角度窗口设置为手动时可用。必须 > 0 且 <= 100。 |
屈服点百分比 | 必须 >= 20 % |
触发器扭矩 | 角度测量在该触发器处开始。必须 > 0 且 < 工具最大扭矩。 |
减震 | 正在计算变化率时的频率。必须 > 0 且 <100 且 <角度窗口。 |
下限 | 可接收的最小角度。必须 >= 0 |
上限 | 可接收的最大角度。必须 > 0 |
扭矩滤波器类型 | 滤波器类型:
|
截止频率 | 当扭矩滤波器类型设置为低通时需要指定:
|
样本数量 | 当扭矩滤波器类型设置为滑动平均值时需要指定:
|
MT – 平均扭矩
该监视器在监视期间测量平均扭矩,并检查计算值是否在限值范围内。
参数 | 说明 |
|---|---|
类型 | 指定开始条件:
|
扭矩触发器 | 当类型设置为触发扭矩、角度触发或角度窗口时可用。必须 >= 0 且 < 工具最大扭矩。 |
角度触发器 | 当类型设置为角度触发或角度窗口时可用。必须 > 0。 |
角度窗口 | 当类型设置为角度窗口时可用。必须 > 0。
|
时间间隔 | 当类型设置为时间间隔时可用。必须 > 0。 |
下限 | 最低可接受的扭矩。 |
上限 | 可接收的最大扭矩。 |
PT – 峰值扭矩
在该步骤,监控器测量监控期间达到的最大扭矩,包括任何过冲,并检查它是否介于上限和下限之间。
参数 | 说明 |
|---|---|
下限 | 最低可接受的扭矩。 |
上限 | 可接收的最大扭矩。 |
PTCA – 后螺纹切割角度
测量监控期间达到的角度并检查其是否介于指定角度限值之间。在达到螺纹切割角度窗口结束处之前,触发扭矩水平被忽略。然后,一旦测量扭矩超出触发扭矩,角度测量就会开始。参数停止条件规定角度测量应在哪里结束。
参数 | 说明 |
|---|---|
触发器扭矩 | 必须 >= 0 |
螺纹切割角度窗口 | 必须 > 0 |
角度测量类型 | 峰值角度 达到峰值扭矩时的角度 关闭角度 结束时角度 |
螺纹切割触发扭矩 | 必须 >= 0 |
下限 | 必须 >= 0 |
上限 | 必须 > 0 必须 > 下限 |
PTCPT – 后螺纹切割峰值扭矩
测量监控期间达到的最大扭矩,包括任何过冲,并检查其是否介于扭矩限值之间。在达到螺纹切割角度窗口结束处之前,所有扭矩值被忽略。
参数 | 说明 |
|---|---|
螺纹切割触发扭矩 | 必须 >= 0 |
螺纹切割角度窗口 | 必须 > 0 |
下限 | 必须 >= 0 |
上限 | 必须 > 0 必须 > 下限 |
PVTH – 后视图扭矩高
此监控器检查角度窗口中的所有扭矩值是否低于限值。
角度窗口长度中的所有扭矩值应低于上限。角度窗口以开始角度中设置的角度从关闭点反方向开始。然后反向跨越角度窗口长度中设置的角度。如果开始角度留空,角度窗口在切断点开始。监控器中使用的扭矩值基于根据样本数量求出的平均扭矩值。如果步骤的总角度小于开始角度加角度窗口长度,监控器将报告 NOK。
参数 | 说明 |
|---|---|
开始角度 | 必须 >= 0 |
窗口长度 | 必须 <= 0 |
样本数量 | 1 |
上限 | 可接收的最大扭矩。 |
PVTL – 后视图扭矩低
与监控器后视图扭矩高相同,但是监控器将转而检查角度窗口长度中的所有扭矩值是否超过下限。
参数 | 说明 |
|---|---|
开始角度 | 必须 >= 0 |
窗口长度 | 必须 <= 0 |
样本数量 | 1 |
下限 | 最低可接受的扭矩。 |
PrT – 有效扭矩
监控器计算窗口长度中的有效扭矩值并检查它们是否介于扭矩限值之间。角度窗口以开始角度中设置的角度从关闭点反方向开始。然后反向跨越角度窗口长度中设置的角度。如果开始角度留空,角度窗口在切断点开始。求出的有效扭矩值为窗口长度期间的平均或峰值扭矩(取决于用户设置的参数)。求出的值被保存为结果数据测得的有效扭矩。如果扭矩补偿设为开启,测得的有效扭矩将从连续步骤中的所有扭矩结果值中扣除。任何之前计算的有效扭矩补偿值将不再从扭矩结果值中扣除。如果扭矩补偿设为否,将不会在连续步骤中扣除。
如果步骤的总角度小于开始角度加窗口长度,监视器将报告 NOK。
有效扭矩可以作为测量平均值或峰值扭矩来测量。要在这两种模式之间进行选择,请将使用值参数设为平均扭矩(适用于平均值)或峰值扭矩(适用于峰值)。
参数 | 说明 |
|---|---|
扭矩补偿 | 开启或关闭。 |
开始角度 | 必须 > 0 |
窗口长度 | 必须 >= 0 |
下限 | 必须 > 0 |
上限 | 必须 >= 0 |
使用值 | 平均扭矩(用于平均值)或峰值扭矩(用于峰值)。 |
SOT – 切断扭矩
切断点是指步骤达到其目标的点。在切断点处测量扭矩,并检查其是否介于上限和下限之间。
参数 | 说明 |
|---|---|
下限 | 最低可接受的扭矩。 |
上限 | 可接收的最大扭矩。 |
SOC – 切断电流
切断点是指步骤达到其目标的点。在切断点处测量电流,并检查其是否介于上限和下限之间。
参数 | 说明 |
|---|---|
下限 | 可接收的最小电流。 |
上限 | 可接收的最大电流。 |
SSD – 杆件滑动检测
在该步骤,监控器检测并报告步骤中的杆件滑动影响。通过计算扭矩低于触发级别的次数来完成检测。如果次数大于最大振动次数,则报告粘滑错误。监控器以两种不同的模式操作:动态或固定。两种模式之间的差异是计算触发器水平的方式。
动态扭矩:触发器水平被动态计算作为监控期间迄今达到的当前最大扭矩的峰值扭矩百分比。一旦扭矩超过触发扭矩,监控启动。
固定扭矩:触发器水平为用户指定的固定触发扭矩。此模式中不需要百分比。
如果扭矩从未达到监控器不启动的触发扭矩,这将导致 NOK 状态。
参数 | 说明 |
|---|---|
类型 | 指定将在监视器杆件滑动检测中执行哪种类型的杆件滑动检测。默认:动态扭矩。 |
峰值扭矩百分比 | 默认:80%,必须 > = 10 且 <100。 |
触发器扭矩 | 默认:5,必须 > = 0 且 < 工具最大扭矩。 |
最大振动次数 | 默认:5,该值必须 >=3 且 <=20。 |
Ti – 时间
测量监控期间的实耗时间并检查其是否介于时间限值之间。时间测量在监控开始处开始,如果触发扭矩被指定,则在扭矩第一次在监控期间超过触发扭矩的点处开始。
参数 | 说明 |
|---|---|
触发器扭矩 | 必须 > = 0 且 < 工具最大扭矩。 |
下限 | 必须 >= 0 |
上限 | 必须 > 0 必须 > 下限 |
TG – 扭矩变化率
此监视器检查变化率是否在限值范围内。
参数 | 说明 |
|---|---|
斜率角度窗口 | 指定角度窗口:
|
角度窗口 | 当变化率角度窗口设置为手动时可用。必须 > 0 且 <= 100。 |
结束点检查 | 如果设置为是,则仅检查在该步骤的截止点测得的变化率是否在限值范围内。 |
触发器扭矩 | 角度测量在该触发器处开始。必须 > 0 且 < 工具最大扭矩。 |
减震 | 正在计算变化率时的频率。必须 > 0 且 <100 且 <角度窗口。 |
下限 | 最低可接受的扭矩变化率。必须 >= -100。 |
上限 | 最高可接受的扭矩变化率。必须 > -100 且 > 下限。 |
扭矩滤波器类型 | 滤波器类型:
|
截止频率 | 当扭矩滤波器类型设置为低通时需要指定:
|
样本数量 | 当扭矩滤波器类型设置为滑动平均值时需要指定:
|
角度偏置 | 当结束点检查设置为否时可用。指定首次通过触发扭矩后开始计算变化率的度数。 |
TAW – 角度窗口的扭矩
此监控器检查角度窗口中的所有扭矩值是否处于扭矩限值内。
参数 | 说明 |
|---|---|
触发器扭矩 | 必须 >= 0 |
开始角度 | 必须 > 0 |
窗口长度 | 必须 <= 0 |
下限 | 必须 >= 0 |
上限 | 必须 > 0 必须 > 下限 |
如果通过窗口则为 NOK | 如果设置为是,则当未到达角度窗口的终点时,此监视器的状态为 NOK。 |
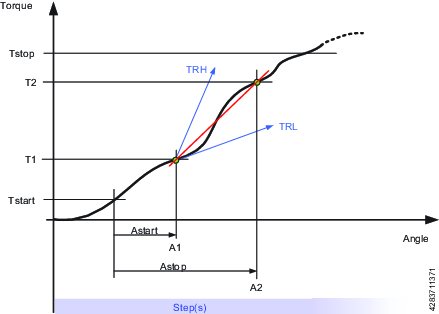
TRD – 扭矩率和偏差
在该步骤,监控器测量并检查扭矩率,也就是扭矩与角度的比率。检查计算得到的扭矩率是否介于上限和下限定义的扭矩率限值内。
参数 | 说明 |
|---|---|
触发器扭矩 | 角度起始点扭矩。 |
起始点角度 | 当从触发器扭矩测量起始点角度时,扭矩测量开始。 |
结束点角度 | 扭矩测量停止处的角度点。 |
结束点扭矩 | 扭矩测量停止处的扭矩。 |
下限 | 最低可接受的扭矩。 |
上限 | 可接收的最大扭矩。 |
限值 | 必须 > 0 |
Tstart = 从 AngleStart 开始的扭矩
Tstop = 停止扭矩测量处的扭矩。
Astart = 当从 TorqueStart 处测量到 AngleStart 时,开始测量扭矩。
Astop = 扭矩测量停止处的角度点。
TRL = 下限
TRH = 上限
不支持以下监视器:
监视器 | 说明 |
|---|---|
CL | 点击 - 不适用 |
LD | 拧松检测 - 不适用 |
可用步骤限制概览
为确保在发生非预期事件时停止拧紧,可为多步骤拧紧程序添加限制。例如,这些限制可测试确保未达到最大扭矩,或多步骤拧紧的部分不会花太长运行时间。每个步骤有其自己的一组强制步骤限制和可选步骤限制。当将新步骤拖至多步骤程序时,将包含强制限制。所有步骤最多可各有 4 个限制。
下列限制被自动添加到多步骤拧紧程序中添加的每个步骤:
步骤限制 | 适用步骤 |
|---|---|
最大时间 | 全部 |
最大扭矩 |
|
最大角度 |
|
CTh – 跨线程
该限制从扭矩超过开始扭矩 (T1) 的点到扭矩超过结束扭矩 (T2) 的点检查角度。如果从开始扭矩 (T1) 测得的角度大于最大限值 (Amax),工具立即停止。
当扭矩超过结束扭矩 (T2) 时,测得的角度对照最小限值 (Amin) 检查。如果角度小于该限值,工具立即停止。
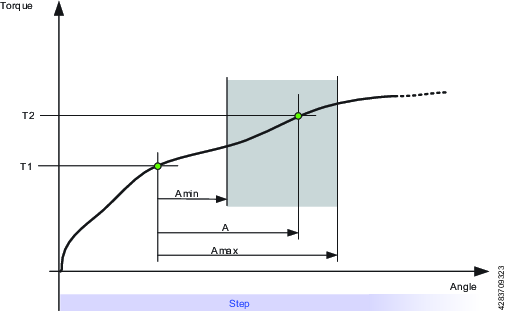
参数 | 说明 | 图中 |
|---|---|---|
起始扭矩 | 必须 <=0。 | T1 |
结束扭矩 | 必须 <=0。 | T2 |
最小限值 | 角度下限。 | Amin |
最大限值 | 角度上限。 | Amax |
A – 最大角度
该限制进行角度测量。如果测得的角度达到最大限值,工具立即停止。角度从限制的开始处测量,或者(如果指定的话)从扭矩在该限制期间第一次超过触发扭矩的点处测量。
参数 | 说明 |
|---|---|
触发器扭矩 | 如果指定,这是开始测量角度处的扭矩。 |
最大限值 | 如果达到该限值,工具立即停止。 |
T – 最大扭矩
该限制检查扭矩。如果测得的扭矩超过最大限值,则立即停止工具。
参数 | 说明 |
|---|---|
最大限值 | 如果扭矩达到此指定限值,则立即停止工具。 |
Ti – 最大时间
该限制进行时间检查。如果达到最大限值,工具立即停止。
参数 | 说明 |
|---|---|
最大限值 | 如果时间已到,工具立即停止。 |
Rh - 重复拧紧
该限制检查扭矩。如果测得的扭矩超过检测扭矩,则工具立即停止,程序跳至程序的结束处。只能在多步骤拧紧程序的第一步中添加步骤“重复拧紧”限制。一旦将重复拧紧限制添加到第一步,就不能将其移动到拧紧程序中的任何其他位置。必须将重复拧紧限制从第一步删除,以便将其移动到拧紧程序中的其他位置。
参数 | 说明 |
|---|---|
检测扭矩 | 如果测得的扭矩超过检测扭矩,则工具立即停止,程序跳至程序的结束处。必须大于零。 |
RT – 取消扭矩
该限制检查扭矩,如果测得的扭矩下降到限制条件以下,则工具立即停止,程序跳到程序的结束处。取消扭矩和角度控制过程的扭矩限制有两种方法
参数 | 说明 |
|---|---|
类型 | 扭矩控制过程或角度控制过程。 扭矩控制过程:扭矩控制过程检查扭矩。如果测得的扭矩下降到取消扭矩限值以下,则工具立即停止,程序跳至程序结束处。如要激活限制,扭矩必须先超过取消扭矩限值的 110%。 角度控制过程:该限制检查限制期间达到的最大扭矩。如要激活限制,扭矩必须首先超过触发扭矩。如果测得的扭矩下降到最大扭矩以下,时间大于取消扭矩时间,则工具立即停止,程序跳至程序结束处。 |
取消扭矩限值 | 默认:10 Nm。必须 > 0。 |
TG – 扭矩变化率
该限制检查变化率,如果它超出限值,工具立即停止,程序跳到程序的结束处。
参数 | 说明 |
|---|---|
斜率角度窗口 | 指定角度窗口:
|
角度窗口 | 当变化率角度窗口设置为手动时可用。必须 > 0 且 <= 100。 |
触发器扭矩 | 必须 > 0 且 < 工具最大扭矩。 |
减震 | 正在计算变化率时的频率。必须 > 0 且 <100 且 <角度窗口。 |
最小限值 | 必须 >= -100。 |
最大限值 | 必须 > -100 且 > 下限。 |
扭矩滤波器类型 | 滤波器类型:
|
截止频率 | 当扭矩滤波器类型设置为低通时需要指定:
|
样本数量 | 当扭矩滤波器类型设置为滑动平均值时需要指定:
|
TAW – 角度窗口的扭矩
该限制检查角度窗口长度中的测得扭矩是否介于扭矩限值之间。如果测得的扭矩超出限值,工具立即停止,程序跳到结束处。角度窗口长度从扭矩第一次超过触发器扭矩的点处以开始角度开始。如果触发扭矩没有设置,开始角度在限制的开始处开始。
如果未达到角度窗口长度的结束处,限制的状态为 NOK。
参数 | 说明 |
|---|---|
触发器扭矩 | 必须 >= 0 |
开始角度 | 必须 >= 0 |
窗口长度 | 必须 > 0 |
最小限值 | 必须 >= 0 |
最大限值 | 必须 <= 最小限值 |
TCD – 扭矩与电流偏差
该限制验证转化为对应扭矩的所有当前测量是否不超过使用扭矩传感器测得的实际扭矩的最大偏差。当扭矩在该步骤期间第一次达到触发扭矩并被激活直至步骤达到其目标时,限制开始。
如果触发扭矩从未达到,监控器将报告 OK。
参数 | 说明 |
|---|---|
触发器扭矩 | 必须 >= 0 |
最大偏差 | 默认:1,必须 > 0 |
拧紧程序属性
常规设置
参数 | 说明 |
|---|---|
名称 | 用户定义的多步骤程序名称。 |
螺纹方向 | 螺纹方向,顺时针或逆时针 |
拧松程序 | 指出拧松程序是否可用。从软件中可用的拧松程序列表中选择。 |
类型 | 程序类型,拧紧或拧松 |
程序开始 | 设置用于生成结果的扭矩水平。如果保留空白,每次启动工具时都将生成结果;否则仅从设置的扭矩水平生成结果。 |
真实角度补偿 | 工具配备有陀螺仪,可在拧紧过程中测量工具旋转。如果工具在拧紧过程中旋转,那么角度测量可能会被破坏。如果被制作成角度参考,那么它有可能导致错误的拧紧。使用真实角度补偿,工具可以补偿这些旋转并正确拧紧。 只有配备陀螺仪的工具才有能力测量工具旋转。 ICB 工具不支持真实角度补偿。 安装了扣爪(齿轮前附件)的工具不支持真实角度补偿。 |
程序监控器
参数 | 说明 |
|---|---|
角度 | 为整个程序打开或关闭角度监控。如果按步骤启用和触发器扭矩空白,角度监控将在程序开始时启动。 |
按步骤启用 | 设置角度监控生效的一系列步骤。如果没有指定最终步骤,角度监控将在并非松开套筒步骤的程序最终步骤停止。 |
类型 | 角度监控类型。选择:
|
触发器扭矩 | 设置触发器扭矩值用于角度监控。 |
下限 | 设置角度监控(程序)下限 |
上限 | 设置角度监控(程序)上限 |
程序限制
参数 | 说明 |
|---|---|
最大时间限值 | 设定秒数。该限制检查拧紧的总时间,如果它超过时间高限值,工具将立即停止。时间从程序开始时测量。 |
最大扭矩限值 | 该限制检查扭矩,如果测得的扭矩超过时间高限值,工具立即停止。 |
验证
在配置拧紧程序期间,将输入的值与刀具能力值进行比较,以防止参数超出选定的限值。如果使用了许多不同的工具,用户定义的最大值非常有用。
参数 | 说明 |
|---|---|
验证工具值 | 开启:将输入的值与工具功能值进行比较 关闭:不执行验证 |
工具 | 显示与之比较值的工具。 |
附件调校
附件调校可以对工具的前附件进行补偿。可以为每个拧紧程序进行补偿。
操作人员可以热切换附件,然后选择针对特定附件调校的拧紧程序。
参数 | 说明 |
|---|---|
使用附件调校 | 是或否 |
齿轮比 | 需要使用附件传动比来补偿角度。 最小:0.5 最大:3.6 套筒转速 = 工具速度/传动比 |
效率优化 | 需要使用附件传动比及效率优化来补偿扭矩。 最小:0.5 最大:1.0 例如,0.9 表示 10% 的效率损失。 |
配置拧紧程序
添加拧紧程序
转到主菜单中的拧紧,然后在左窗格中选择多步骤程序库。
选择 + 图标,然后在对话框中选择适当的程序类型(拧紧或拧松)。
继续在拧紧区域中向该程序添加步骤、监视器和限制。
删除拧紧程序
转到主菜单中的拧紧,然后在左窗格中选择多步骤程序库。
选择要删除的多步骤拧紧程序。
在程序本身的左下方,选择删除。
在对话框中选择是进行确认。
创建多步骤程序
为了创建多步骤程序,可在拧紧区拖放步骤、监控器和限制。
步骤只能放在程序的起点和终点之间,而监视器和限制只能放在步骤上。
功能 | 说明 | |
|---|---|---|
开始和结束点 |  | 多步骤程序的开始和结束点。所有步骤必须放在这两个点之间。 |
添加步骤 |  | 从列表将步骤拖放到开始和结束点之间的目标位置。 |
移动步骤 |  | 点击并按住步骤并将它移动到目标位置 |
显示步骤属性 |  | 点击步骤以显示属性 |
关闭步骤属性 |  | 点击拧紧区的任意处以关闭属性菜单 |
删除步骤 |  | 打开步骤属性并点击菜单底部的删除 |
添加限制/监控器 |  | 从列表将限制/监控器拖放到相应的步骤。 |
移动限制/监控器 |  | 点击并按住图标(监控器使用复选标记,限制使用停止标志),将它拖放到相应的步骤 |
显示限制/监控器属性 |  | 点击限制/监控器图标以显示属性菜单 |
关闭限制/监控器属性 |  | 点击拧紧区的任意处以关闭属性菜单 |
删除限制/监控器 |  | 打开限制/监控器属性并点击菜单底部的删除 |
步骤错误 |  | 当验证错误出现在步骤中时,该步骤将被标记。注意,当步骤属性打开时,导致错误的参数也将被标记。 |
监控器/限制错误 |  | 当验证错误出现在监控器或限制中时,监控器或限制将被标记。注意,当监控器/限制属性打开时,导致错误的参数也将被标记。 |
禁止位置 |  | 当(步骤、监控器或限制的)具体位置不被允许时,占位符图标将不会显示。 |
使用批次序列选项卡
批次序列用来按特定的顺序执行指定的拧紧次数。
拧紧顺序可按固定方案进行,也可留给操作员在无序方案中决定。在任何情况下,套筒或信号都可用来在工具与操作员之间通信。
设定批次,以使用同样的拧紧程序来执行指定的连续拧紧次数。必须为批次指定拧紧程序和批次容量,才可运行批次。
当操作需要批次/拧紧程序组合时,批次序列是一组有序的批次。
批次序列最多可由 99 个批次组成,批次容量最多为 99 次拧紧。批次序列中的批次按所列顺序执行,或者通过使用套筒选择器来决定运行哪个批次。
出现以下任何一种情况时,批次序列完成(且工具可能被锁定):
所有拧紧已完成,结果为 OK 或 NOK。
序列中止计时器信号终止任务。未执行拧紧被报告,结果为 NOK。
批次序列设置
批次序列菜单显示单个批次序列以及下列配置项目的详情:
名称:序列名称和索引号。
设置:用于控制拧紧流程和顺序的参数。
批次配置:通过单个拧紧程序创建批次序列的功能。批次包括一个单一拧紧程序,它可以重复多次。
参数 | 说明 |
|---|---|
名称 | 批次序列名称由一个索引号与一些可选字符组成。索引位置无法更改。新配置将被提供最小的可用索引号。当使用来源和识别码数字成为任务选择过程的一部分时,索引号非常重要。 |
参数 | 说明 | 默认值 |
|---|---|---|
批次序列完成后,工具锁定 | 批次序列计数器等于批次序列大小时,批次序列完成。 日期:工具会被锁定,必须选择拧紧程序或批次序列,才可继续执行拧紧操作。 关闭:完成后,批次序列已准备好重复。 | 开启 |
自由顺序 | 否:如果已配置了批次来执行拧紧操作,则将按所列顺序执行这些经过配置的批次。如果已指定套筒,则在即将执行批次时,系统将会提示提供套筒。 是:经过配置的批次可按任意顺序执行。操作人员必须通过使用套筒选择器,向系统指明执行哪个批次。 当所有连接件均已成功完成时,批次会被视为“完成”。 | 否 |
NOK 数增加 | 尽管拧紧操作被报告为 NOK,但仍然可增加批次计数值。要使最大连续 NOK 工作(可以拧紧单个螺栓的最大次数),必须将 NOK 增量设为否。如果将此参数设为是,将使序列进入下一次拧紧。 | 否 |
最大连续 NOK 次数 | 最大连续不正常 (NOK) 拧紧次数是指批次中允许的连续不正常拧紧的最大次数。如果达到 Max consecutive NOK(最大连续 NOK 次数),显示事件Too many NOK tightenings (4020)(不正常拧紧次数过多 (4020))。 | 0 |
OK 拧松递减 | 当前活动批次内的计数器递减已完成的批次不能递减。 从不:设置关闭。当在活动批次中执行拧松时,计数器不递减。 始终:拧松时,如果最后一次拧紧正常,则活动批次中的计数器递减。 当最后拧紧 OK 时:无论之前的拧紧结果如何,在活动批次中执行拧松时计数器递减。 | 从不 |
顺序中断计时器 | 日期:选定批次序列可以在规定时间限制范围内中断 关闭:选定批次序列不能中断。 | 关闭 |
中止时间 | 时间以秒为单位。 | 10 s |
参数 | 说明 |
|---|---|
拧紧程序 | 要在批次中使用的拧紧程序。 |
批量大小 | 批次将要执行的拧紧次数。 一个批次的最大拧紧次数为 99。 批次容量为 0 表示批次的拧紧次数无穷大。 |
识别码数字 | 在使用套筒选择器时,此套筒位置用于激活批次。 |
向批次序列添加新批次
转到主菜单中的批次序列。工作区显示批次序列的列表。
选择右上角的 + 图标。
为批次序列分配一个名称。
在设置中选择相关参数。
选择批次配置 > 编辑。
为批次选择一个拧紧程序。
输入批次大小,即批次将包含的拧紧次数。
输入一个可选的识别码。
在序列列表中的第一个空缺位置将分发新的批次序列。如果没有空缺的插槽,它将被放置在列表底部,并被分配可用的最小索引号。不能更改索引号来重新安排批次拧紧顺序。
删除批次序列中的批次
转到主菜单中的批次序列。工作区显示批次序列的列表。
选择要删除的批次序列。
在工作区的底部,选择删除按钮。
当批次从批次序列中删除时,索引序列被压缩和更新,不留空隙。已删除的批次序列的索引号将自动分配给下一个创建的序列。
使用来源选项卡
用作拧紧任务的外部信号在来源菜单中配置。来源为与虚拟站点相连的附件或同类附件。提供两类来源任务:
源拧紧任务:用于选择单个拧紧程序。
源批次任务:用于选择批次序列,即一系列拧紧程序。
来源拧紧
来源拧紧将特定拧紧程序与标识符编号关联。当将标识符编号发送至工具(通过外部数字信号或在使用套筒选择器的情况下提升选择器中的相应套筒),关联程序将一直运行,直至发送不同的信号(或捕获到套筒)。不存在批次计数。
要将单独的列表链接到虚拟站点,必须将源任务分配给虚拟站点。转到主菜单中的集成控制器工具 > 虚拟站点,然后选择任务 > 更改任务。
来源拧紧属性
参数 | 说明 |
|---|---|
名称 | 分配给来源拧紧的名称。 |
选择器模式 | 控制模式:外部来源通过请求标识符编号来选择拧紧程序。将标识符编号关联到套筒选择器中的相应套筒,通过抬升套筒选中拧紧程序。 确认模式:不得将套筒选择器用作控制来源。在此模式下,将标识符编号关联至拧紧程序和特定套筒(在列表新增列中予以指明)。当(通过外部信号)请求标识符编号时,在套筒选择器中弹出相应套筒提示;在操作员抬升套筒(禁用其他套筒)时,会启用拧紧程序。如果未指定套筒(即在套筒列设为 0),将直接启用拧紧程序并忽略套筒状态。 |
每个程序的最大连续 NOK 次数 | 开启:即使执行 NOK 拧紧操作,批次也会前进。 关闭:设置拧紧的最大连续 NOK 次数。只有执行成功的拧紧时,批次才会前进。 |
最大连续 NOK 次数 | 设置允许的连续 NOK 结果的数量。如果该值设置为 0,则不会检查 NOK 拧紧情况。当达到最大连续 NOK 时,工具锁定并停止序列执行。 |
批次控制 | 选择如何执行来源拧紧。 内部:配置来源拧紧要重复多少次。 外部:使用开放协议或外部协议来配置执行来源拧紧的次数。任何配置更改都将清除来源拧紧,从清洁且已知的状态重新开始(批次中的批次计数将重置为 0)。进行中的拧紧可在更改生效之前完成。 |
配置源拧紧
转到主菜单中的来源,然后在左侧窗格中选择拧紧。
选择右上角的 + 图标。
给来源拧紧分配一个名称并选择正确的选择器模式(控制或确认,视需要而定)。
可以设置每个来源拧紧或来源拧紧中包含的每个单独程序的最大连续 NOK 次数。根据需要将每个程序最大连续 NOK 次数参数设置为是或否:
要设置每个来源拧紧的最大连续 NOK 次数,请将每个程序的最大连续 NOK 次数设置为否。在最大连续 NOK 次数字段中设置该值。
要设置每个程序的最大连续 NOK 次数,请将每个程序的最大连续 NOK 次数设置为是。对于标识符选择器配置部分中的每个程序,请设置最大异常次数一列中的值。
在创建新的来源拧紧时,默认只提供一个可编辑的标识符号。在屏幕底部,选择 + 图标以添加更多。
给每个项分配一个标识符编号。
如果使用套筒选择器,标识符编号对应套筒选择器中的位置,即标识符编号 1 对应套筒选择器内的套筒编号 1。
选择一行并从拧紧程序列表中选择,选择与每个标识符编号相关联的拧紧程序。
来源批次
配置来源批次
转到主菜单中的来源,然后在左侧窗格中选择批次序列。
选择右上角的 + 图标。
为来源批次分配一个名称。
如果扫描新的标识符字符串中止之前扫描,将中止新的标识符设为是。
选择标识符方法(文本的字符串或数字值的数字)
如果标识符方法设置为字符串,继续以下步骤:
如果需要以任意顺序扫描字符串,将自由顺序设置为开。
标识符字符串最多可以由四个不同的字符串组成。当自由顺序设置为关时,必须以特定顺序扫描字符串,系统才能识别字符串。
如有必要可选择标识符字符串配置部分的 + 图标添加标识符字符串。
为需要更改的标识符字符串选择名称标签。在对话框中,可以为字符串指定以下属性:
名称 - 字符串的名称
长度 - 字符串的长度。有关连接字符串的更多信息,请参见组合标识符字符串。
有效位 - 字符串中的相关位置。有关有效位的更多信息,请参见要在条形码字符串中读取的有效位。
保存位 - 需要由系统记录的位置。有关已保存位置的更多信息,请参见已保存位置。
字符串属性窗口中的 ID 编号 (1−4) 无法修改,只能用于在不同字符串之间导航。
将自由顺序设置为开时可能发生错误,不同字符串的长度出现重复。此时,扫描顺序不会启用拧紧程序。如需修复该错误,将自由顺序设置为关,或者调节字符串长度。
在标识符字符串配置字段的底部选择编辑。
在编辑窗口中,指明应将哪些字符串(在字符串包含列中)与哪些批次序列(在激活列中)关联在一起。选择底部的 + 图标以添加更多字符串。
键入“字符串中包含”时可使用通配符。通配符可以用于字符串中的任何位置。模糊匹配结果不会激活批次序列。
通配符是 .(句号)
有效位
有效位的作用是,将字符串组合成您预定义的字符串时,定义读取条码字符串中的哪个字符。有效位的数量必须与预定义字符串中的字符数量相同。
条形码字符串中要读取的重要位置
条形码字符串中的位与 1 到 1024 之间的一个数字相关。字符串的第一位是 1,最后一位是 1024。
分辨位必须根据下表中给出的规则规定。
说明 | 分辨位 | 有效配置 | 与预定义字符串匹配的条码字符串 |
|---|---|---|---|
顺序排列分辨位 | 1,2,3,7,8 | 确定 | ABCGH |
以可选顺序排列分辨位 | 7,1,2,3,8 | 确定 | GABCH |
数字范围 | 1-3,7-8 | 确定 | ABCGH |
组合标识符字符串
用于匹配的标识符字符串由最多四个来自工厂管理系统的字符串组成,或者由最多四个需要组合成一个字符串的条形码枪输入组成。
+ 和 - 按钮管理组合的字符串数。提供以下参数:
参数 | 说明 |
|---|---|
名称 | 字符串应为指定名称。 |
长度 | 字符串的长度应已知且须输入。这对能够组合正确的字符串标识符十分重要。 |
分辨位 | 组合字符串中的分隔号位置或范围(由连字符分开)供匹配使用。 |
已保存的位置 | 将被保存到结果的字符串中的逗号分隔位置或范围。 |
每行中的开始和结束参数定义各字符串在匹配过程的接下步骤中使用的组合字符串标识符。
任务选择过程使用标识符字符串作为输入的第一部分用于定义字符串中将要使用的位置:
输入有效位以定义标识符字符串中将用于匹配的位置。此类位置必须以逗号分隔或按范围排列。
已保存的位置
保存位是一个字段,其中用户可以指明保存来源批次中使用的每个字符串哪些部分,以及如何在日志中进行反映。在此字段中,指明需要在字符串中保存的位置。位置可能只构成整个字符串的一部分。如果字段留空,将保存整个(相连)字符串。下表只显示保存位组合的部分示例。
保存位值用逗号分开(不带空格),范围使用连字符指明。
标识符字符串 | 位置 |
|---|---|
字符串 1:1234567 | 1-7 |
字符串 2:abcdef | 8-13 |
字符串 3:GHIJKL | 14-19 |
字符串 4:890 | 20-22 |
已保存的位置 | 保存结果 |
|---|---|
(空) | 1234567abcdefGHIJKL890 |
1-3,9,11,15,20-22 | 123bdH890 |
8-12,1-7,19,20-21 将自动变更为:1-12,19-21 | 1234567abcdeL89 |
使用配置选项卡
该工具及其附件的配置在配置菜单中进行。
工具配置
以下部分描述如何配置不同的工具功能,例如 LED 和按钮。
1.功能按钮
工具上的功能按钮可以配置为控制多达六个可用的输入信号。按钮的三种可能条件状态结合方向开关的两种可能状态使用。
功能按钮不适用于 ICB 工具。
转到主菜单中的配置,然后选择工具配置 > 编辑。
选择 1.功能按钮 > 编辑。
设置适用的参数:
功能按钮状态
方向开关状态
按下
顺时针
推一次
顺时针
推两次
顺时针
按下
CCW
推一次
CCW
推两次
CCW
可以为六个输入信号组合中的每一个分配以下项目之一:
项目
中止序列
确认事件
激活工具扫码枪
批次递减
批次递增
忽略拧紧程序
主机解锁
重置批次
重置批次序列
重置过多 NOK
选择下一个标识符编号
选择上一个标识符编号
解锁工具开启完成
解锁工具开启禁用
设置检测间隔参数:
参数
说明
默认值
推动检测间隔
推一次:按下按钮和松开按钮的最大推动时间间隔(毫秒)。
300 毫秒
下次推送间隔
推两次:首次推动后松开按钮和再次按下按钮的最大时间间隔(毫秒)。
300 毫秒
2.LED 光环
工具 LED 有以下功能:
蓝色 LED 位于 LED 环旁边。输出信号可连接到 LED 指示灯并向操作员提供一个输出消息。
LED 环由红色、黄色和绿色环组成。输出信号可连接到 LED 指示灯并向操作员提供输出消息。
结果指示灯使用 LED 环。拧紧结果信号可连接到 LED 指示灯并在拧紧结束时向操作员提供输出消息。
输出信号既可为事件类型,也可为状态类型。
只要此状态激活,则状态信号启用。
事件信号在可编程的时间范围内启用。
蓝色 LED
蓝色 LED 为具有稳定信号的独立 LED。
从快捷菜单选择将连接到蓝色 LED 的信号。
若为事件类型信号,选择信号持续时间。
结果指示灯
可从快捷菜单选择预配置的方式。此方式可以为不同拧紧结果的组合。
选择要从快捷菜单显示的信号消息。
信号
说明
无
无论结果如何,在拧紧后均无法启用任何 LED 指示灯
红色:高:黄色:低
如果拧紧异常 (NOK) 终止,红色 LED 表示最终值太高,黄色 LED 表示值太低。
红色:NOK:黄色:低
红色 LED 指示灯表示不正常结束拧紧 (NOK)。附加黄色 LED 指示灯可以指示,此值是否过低。
红色:NOK
红色 LED 指示灯表示不正常结束拧紧 (NOK)。未显示其他 LED 指示灯。
红色:高(优先):黄色:低
如果 NOK 原因是达到了高目标角度/扭矩,则“高”指示将压制任何“低”指示
选择信号的持续时间。
当拧紧终止时,LED 亮起,LED 是结果指示灯配置的一部分。
当拧紧已执行时,LED 熄灭,LED 不是结果指示灯配置的一部分。
执行拧紧后,当超过最大时间时,LED 指示灯熄灭。
当开始下一次拧紧时,LED 指示灯熄灭。
当 LED 光环配置通过输出信号激活时,LED 熄灭并被另一个 LED 信号方式取代。
LED 光环
LED 环包括红色、黄色和绿色三圈 LED 灯。每圈均会有稳定信号或闪烁信号。这共提供六种可以与 LED 光环相连的不同信号。
选择要连接到 LED 颜色的信号,然后从快捷菜单中选择输入项目。
若为事件类型输入项目,选择信号持续时间。
LED 指示灯仅在无持续拧紧且启用控制输出信号时才会亮起。
当超过最大时间时,LED 指示灯熄灭。仅在信号类型为事件时适用。
当开始下一次拧紧时,LED 指示灯熄灭。
当控制输出信号停用时,LED 指示灯熄灭。仅在信号类型为状态时才适用。
3.方向开关
工具上的方向开关经过配置后,可在从顺时针 (CW) 快速切换至逆时针 (CCW) 及向后转动时触发一个输入信号,反之亦然。
转到主菜单中的配置,然后选择工具配置 > 编辑。
选择 3.方向开关 > 编辑
选择输入,然后从列表中选择一个项目。
4.蜂鸣器
可对蜂鸣器进行配置,使其发出不同的声音。输出信号可映射到每个信号并向操作员提供一个音频接口。
通过将声音分配给从可用信号列表中所选的信号,对蜂鸣器进行配置。可以将信号及声音按照 1 - 10 优先排序,其中“1”表示最高优先级,“10”代表最低优先级。信号和声音的默认优先级是 5。
最多可以有 20 个不同的信号映射到声音,每个声音可以有其自己的特征曲线,其参数描述在下表中。若为两个同步信号,具有最高优先级的信号优先于其他信号。
蜂鸣器信号将运行到终止为止,不会被较高优先级信号中断。
转到主菜单中的配置,然后选择工具配置 > 编辑。
选择 4.蜂鸣器 > 编辑
选择 + 图标可将新的声音配置添加到表中。
设置适用的参数:
参数
说明
优先级
提供 10 种不同的声音优先级级别,其中一 (1) 为最高优先级别。默认优先级别为五 (5)。
频率(0Hz、400Hz-4000Hz)
精确频率以赫兹表示。
时间开
蜂鸣器发出声音的时间 (ms)。
计时关闭
蜂鸣器静音的时间 (ms)。
重复
蜂鸣器重复开关顺序的次数。
音量
蜂鸣器音量,以占最大音量的百分比表示。
一般设置
| 说明 |
|---|---|
停机超时 | 开:为了节省电池时间,有一个选项可在经过一定的不活动时间之后自动关闭工具。 关:工具将不会因为不活动而关闭。 |
停机超时 | 时间以分钟为单位。输入一个介于 1-1440 分钟之间的值。 |
前置 LED | 日期:按下工具触发器时,前置 LED 亮起。 关闭:前置 LED 将始终熄灭。 |
释放触发器之后的持续时间 | 前置 LED 持续时间以秒为单位,从释放工具触发器时开始 |
启动条件
可通过启动来源设置来配置启动工具的方式。默认值为 Trigger only(仅限触发器)。
项目 | 说明 |
|---|---|
仅触发器 | 按下工具触发器开始拧紧操作。 |
安全触发器 | 两个触发器(和触发与按动一样)在 500 ms 内相互启用以启动拧紧。 |
附件总线
工具附件通过附件总线连接到工具。
附件类型 | 说明 |
|---|---|
TLS Tag | 工具定位系统标签用于向操作人员提供输出信号。 |
EHMI | 小显示屏和按钮用于按配置选择任务或程序。 |
扫码枪 | 扫码枪。 |
TLS Tag
工具定位系统 (TLS) 标签是工具附件。TLS Tag 安装在工具中并与工具附件总线相连。TLS Tag 是 Ubisense 定位系统的一部分,独立于工具进行处理。除了定位外,TLS Tag 还可向操作员提供信息。所选的输出信号可产生不同的 LED 指示灯组合。
最多可以通过 10 种不同的输出信号反映指示灯优先级。
若有两个同步信号,具有最高优先级的信号优先。当两个优先级相同的信号触发 LED 时,首先收到的信号优先。
参数 | 说明 |
|---|---|
信号 | 从快捷菜单选择触发 LED 指示灯的信号。 若为事件类型信号,选择信号持续时间。 |
颜色 | 选择 LED 指示灯颜色。 |
优先级 | 提供 10 种声音优先级级别,其中一(1)为最高优先级别。默认优先级别为五(5)。 |
输出信号既可为事件类型,也可为状态类型。
只要此状态激活,则状态信号启用。
事件信号在可编程的时间内启用。
EHMI
EHMI 为工具附件。它安装在工具上并与工具附件总线相连。此外,还配有图形显示、三个功能按钮以及一个可选的扫码枪。显示屏为 IXB Software Web 用户界面的子设备,可以选择拧紧程序、批次序列并可查看拧紧结果。
在 EHMI 配置中,可以决定是开启还是关闭功能按钮。
参数 | 说明 |
|---|---|
启用功能按钮 | 开启:功能按钮具有在可视菜单内配置相关设置的完整功能。 关闭:该按钮只可用于确认 EHMI 上的必要对话。 |
扫码枪
扫码枪是一个工具附件。它安装在工具上并与工具附件总线相连。
在扫码枪配置中,可以决定是将扫码枪设为开启还是关闭模式。
套筒选择器
套筒选择器是一个带有 LED 的套筒托盘,可帮助操作员为拧紧过程(例如,批次序列)选择正确的套筒。在使用多个拧紧程序时,使用选择器非常方便。抬起套筒时,相应的拧紧程序会被选中。
可以将多个套筒选择器与虚拟站点相连。
要将套筒选择器连接到虚拟站点,请转到集成控制器工具 > 虚拟站点 > 附件,然后选择选择附件。
要设置套筒选择器,请参阅套筒选择器产品说明。
转到主菜单中的配置,然后在左侧窗格中选择套筒选择器。
为配置分配一个名称。
选择编辑。
选择添加或删除以获取正确的套筒槽数。选择要激活的所有插槽(以蓝色表示)。
如果要通过外部系统控制套筒选择,请将控制设置为外部。
I/O 扩展模块
要设置套筒选择器,请参阅 I/O 扩展模块产品说明。
转到主菜单中的配置,然后在左侧窗格中选择 I/O 扩展模块。
配置适用的输入和输出
一般虚拟站点
转到主菜单中的配置,然后在左侧窗格中选择一般虚拟站点。
为配置命名,然后选择编辑。
在用于报告的结果过滤器字段中,将要包括在结果中的那些参数的开关设为开启。默认将所有参数设为 On(开启)。
在用于报告的结果过滤器字段中,将要包括在结果中的那些参数的开关设为开启。
拧松
批次递增
批次递减
重置批次
忽略拧紧程序
中止序列
重置批次序列
在拧紧设置中,配置在拧紧后配置何时停用拧松及何时停用拧紧。
参数
说明
拧松时解锁工具
关闭、开启 OK、始终
禁用拧松
关闭、开启 OK 拧紧、开启 NOK 拧紧、始终
禁用拧紧
关闭、开启 OK 拧紧、开启 NOK 拧紧、每次拧紧后
使用集成控制器工具选项卡
虚拟站
虚拟站点是控制器的软件抽象概念。IXB 工具有一个带有一个连接的虚拟站点的集成控制器。可以根据需要将各种配置分配给虚拟站点。可以选择任务、分配附件配置以及设置通信协议参数。
选定的任务可以是运行一个拧紧程序、运行一个批次序列或者使用来源菜单中配置的来源启用此任务。可以监视任务,并且任务结果可以与操作中可能发生的任何事件一起显示。
更改许可证类型
转到主菜单中的集成控制器工具,然后在左侧窗格中选择虚拟站点。
在许可证字段中选择虚拟站点类型。
从列表中选择一种新类型。
如果适用,请选择功能 > 编辑,为单个功能添加许可证。
将任务分配至虚拟站点
转到主菜单中的集成控制器工具,然后在左侧窗格中选择虚拟站点。在任务菜单中选择选择任务或更改任务。
选择以下选项卡之一:
拧紧程序:显示工具中可用的拧紧程序列表。
批次:显示工具中可用的批次序列列表。
来源:显示工具中可用的来源任务列表。
从列表中选择一个任务。
任务名称在任务字段中更新。
来源部分详细介绍了使用来源和标识符编号/标识符字符串进行的任务选择。
在虚拟站点中配置手动模式
当工具处于锁止模式时,虚拟站点手动模式用于执行任务。在工具因某些原因锁定时(比如因为工具超出 TLS 规格),仍可能需要用工具执行某些任务,如执行紧急工作。通过配置虚拟站点手动模式,用户可以确定在输入手动模式(进入信号)时发送的何种信号、在手动模式(二级任务)下执行的具体任务以及在离开手动模式(离开信号)时发送的何种信号。
鉴于不同用户所需的环境有所不同(即根据进入和退出及执行的任务发送哪些信号),各虚拟站点手动模式可完全配置。
配置包含三个要素:进入信号、离开信号和二级任务(注意:主任务是指分配到 Task(任务)下的虚拟站点的“自动”任务)。
转到主菜单中的集成控制器工具,然后在左侧窗格中选择虚拟站点。在任务字段中选择设置手动模式。
在第二任务字段中选择选择任务或更改任务。这将确定哪些任务将在手动模式下运行。
如果未设定二级任务,将在手动模式下使用主任务。
可以为二级任务设置所有任务类型(拧紧、批次序列、来源),就像设置主任务那样。
选择进入一节下方的 + 图标,设定要发送的输入信号。
选择离开一节下方的 + 图标,设定要发送的离开信号。参见下方离开信号的参数。
对于进入和离开,存在设定 99 个信号的限制。
进入和离开信号
进入和离开信号的参数相同。
有两种信号类型:布尔和整数/字符串类型。对于布尔类型信号,使用 On/Off(真/假)开关。对于整数/字符串类型信号,使用文本字段指明 (I/O) 信号或字符串。
信号 | 类型 | 默认值 |
|---|---|---|
中止序列 | 布尔 | 关闭 |
确认事件 | 布尔 | 关闭 |
激活工具扫码枪 | 布尔 | 关闭 |
清除结果 | 布尔 | 关闭 |
禁用开放协议命令 | 布尔 | 关闭 |
外部监控 [1-8] | 布尔 | 关闭 |
工具绿色 LED 指示灯闪烁(外部协议) | 布尔 | 关闭 |
重置所有标识符 | 布尔 | 关闭 |
重置批次 | 布尔 | 关闭 |
重置批次序列 | 布尔 | 关闭 |
重置双稳态继电器 | 布尔 | 关闭 |
重置最新标识符 | 布尔 | 关闭 |
重置过多 NOK | 布尔 | 关闭 |
设置双稳态继电器 | 布尔 | 关闭 |
解锁工具开启完成 | 布尔 | 关闭 |
解锁工具开启禁用 | 布尔 | 关闭 |
开放协议
在虚拟站点菜单中的协议下,有一个可用通信协议的列表,具体视当前使用的许可证而定。开放协议适用于所有许可证。
要通过开放协议访问功能,必须为虚拟站点定义一个唯一端口。
转到主菜单中的集成控制器工具,然后在左侧窗格中选择虚拟站点。
将“开放协议”开关设为开。
输入服务器端口号。
输入 PLC 索引值。
PLC 索引用于映射共享内存中要写入开放协议命令的位置。默认值为 1,但可以输入数值 1 到 6
当与客户连接丢失时,选择要应用的操作。
当出现连接错误时,断开设置会控制应用的操作:
无 - 拧紧程序如常继续。
锁定工具高态有效 - 工具在正常完成当前拧紧操作后锁定。
未分配任务 - 在完成进行中任务后终止拧紧。但不适用于常规拧紧程序或批次序列,其中将在完成操作后删除任务。
始终锁定工具 - 工具在完成当前拧紧操作后锁定,无论结果如何。
根据要求,将使用旧有计数器设置为是或否。
通过将计数器设置为“是”,旧有计数器将按顺序对所有拧紧计数,并将该数字输出到辅助系统。
选择 MID2500 拧松程序,然后从列表中选择一个 MID2500 拧松程序。
选择应用。
选择附件
转到主菜单中的集成控制器工具,然后在左侧窗格中选择虚拟站点。
在附件字段中选择选择附件。
选择要连接的附件、套筒选择器、扫码枪或 I/O 扩展模块。
在配置列(左)中,选择要与附件一起使用的配置。
在连接的附件列(右)中,选择要使用的附件。
转到主菜单中的集成控制器工具,然后在左侧窗格中选择虚拟站点。
在附件字段中选择选择附件。
在已分配的附件列表中,选择要删除的附件旁的 - 图标。
工具
查看工具信息
转到主菜单中的集成控制器工具,然后在左侧窗格中选择工具。
展开工具信息字段以查看以下信息:
信息
说明
型号
工具型号名称。
最大速度
工具的最大旋转速度 (rpm)。
齿轮比
输入齿轮角速度与输出齿轮角速度的比。
序列号
当为了获得正确的备件清单或维修说明时,可能需要工具的序列号。
最大扭矩
工具可以针对拧紧使用的最大扭矩。
产品号
工具的产品编号。
健康状态
健康状态视图显示工具温度信息。
工具温度将持续监控。支持的温度单位为摄氏度 (°C) 和华氏度 (°F),默认单位为 °C。可以在两个单位之间切换,无需重启工具。当工具电机温度或工具电子设备温度超过最大温度时,将锁定工具并显示一条警报(2014)。当工具温度低于温度限值时,系统会自动解锁工具。
转到主菜单中的集成控制器工具,然后在左侧窗格中选择工具。
工具电子设备温度和工具电机温度均列在健康状态栏下。
选择任一条目,可查看峰值温度及时间戳的列表。
维护保养
工具存储保养周期数并统计在需要进行工具维护或保养之前可执行多少次拧紧。
转到主菜单中的集成控制器工具,然后在左侧窗格中选择工具。
展开维护字段。以下信息将显示:
参数
说明
上次保养
执行上次保养的日期和时间。上次保养日期在维修车间设置。按下重置保养计数器按钮时,上次保养日期被设置为当前日期和时间。
自保养以来的总拧紧次数
自工具第一次使用以来,由工具执行的拧紧总次数。该数值在维修时可用,并将一直保持到下一次维修。
剩余拧紧数
到下次保养前剩余的拧紧的总数。
保养间隔
两次维修事件间将要执行的拧紧次数。可以设为 10000 的倍数。
重置保养计数器
重设保持拧紧计数器并将上次维修日期设定为当前日期。
在保养间隔字段中设置一个值。
保养间隔数字只能设为 10000 的倍数。除了 10000 倍数以外的任何数字都将四舍五入到 10 000 的最接近倍数。
选择确定。
要启用维护警报,请转到设置 > 警报 > 维护,然后将服务警报指示器设为开启。
工具校准
工具标定用于控制工具如何与参考传感器相对应。
工具内存中存储的校准值用于调整工具的扭矩传感器提供的扭矩值,以使正确的扭矩值能够显示在用户界面中。该界面会显示上次校准工具的日期。
准备校准
确保设置了工具以执行拧紧操作。使用 STa6000、STpad 或 JSB Bench 等扭矩参考传感器来设置工具。有关设置说明,请参阅扭矩参考传感器的用户指南。
选择一个拧紧程序,其目标扭矩与您的工具正常使用的拧紧相对应。
使用以下公式,根据工具和扭矩参考传感器的扭矩读数计算出用于工具的校准值:

转到主菜单中的集成控制器工具,然后选择虚拟站点 > 工具 > 校准。
请注意在校准值中找到的旧校准值:主文本框。
请至少进行三次拧紧操作,并使用从工具和参考传感器(ACTA 或类似传感器)中读取的扭矩值来计算平均扭矩值。
使用新校准值等式计算新校准值。
如果适用,在下次校准日期字段中输入新日期。
通过在校准值:主文本框中输入校准值然后选择应用,将新校准值存储在工具内存中。
完成校准后,执行拧紧以确认新值是正确的。
要启用校准警报,请转到设置 > 警报 > 校准,然后将校准警报设为开启。
使用 STa6000 或 STpad 校准工具
通过 STa6000 或 STpad 执行 QA 校准
转到集成控制器工具菜单,然后选择工具 > QA 校准。
将 QA 校准设为开启。
选择要使用的连接类型(TCP 或 COM),然后输入端口号。
通信的默认端口为 4561。
从 STa6000/STpad 开始校准。STa6000/STpad 请求工具信息和拧紧程序。
单次拧紧程序不能用于校准目的。确保选择了批次程序。
执行拧紧。当校准装置检测到拧紧时,它将向工具请求拧紧结果。
重复上述步骤,直到批次中的所有拧紧都已执行。
完成后,STa6000/STpad 将创建一个报告,并为该工具计算新标定值。
在 STa6000/STpad 中选择存储以将新校准值发送到工具。
在校准过程中,如果更改了拧紧程序,或者更新了序列/批次,则校准被终止。
用于校准的批次大小没有限制。但是,STa6000 只能用两位数字来显示批次大小。因此 STa6000 上的计数器读数 00 表示 100。
完成校准后,执行拧紧以确认新值是正确的。
电机调谐
电机调谐可调整工具的电机控制单元,以优化性能并最大限度地减少损失。
电机调谐将需要大约 2 分钟的时间来执行,并且在完成之前将会按顺时针 (CC) 和逆时针 (CCW) 方向旋转转轴。
对于带有开放端齿轮前附件 (GFA) 的工具:
在执行电机调谐之前,从工具上取下开放端延长件。
转到主菜单中的集成控制器工具,然后选择工具 > 电机调谐。
选择执行,然后按工具上的触发器。
按照屏幕提示操作并按下工具触发器,直至完成工具调谐。
如果电机调谐成功,将显示一个 OK 事件。
如果电机调谐不成功,或者工具触发器在电机调谐还未完成之前已被松开,则将会显示一个 NOK 事件。
IAM
智能应用模块 (IAM) 是工具中的非易失性存储。存储模块包括所有工具程序、配置和结果。
转到主菜单中的集成控制器工具,然后选择 IAM。
为工具应用一个名称。
软件版本
可以同时在工具中安装两个软件版本。在多个工具上执行升级时,安装第二个软件版本非常有用。当生产准备好切换到升级的软件时,可以从 IXB 软件用户界面或通过 ToolsTalk 2 激活新的软件版本。
更改软件版本不会转移工具配置或拧紧程序。
软件激活
该工具可以存储两个已安装的软件版本。通过使用软件激活,可以选择要使用的软件版本。
转到主菜单中的集成控制器工具,然后在左侧窗格中选择软件。
在软件激活窗口中选择当前或已存储的。
该工具将自动重启,以使激活生效。
更新软件版本
转到集成控制器工具菜单,然后在左侧窗格中选择软件。
转到软件更新字段,然后选择浏览。
浏览并选择包含适用软件的 zip 文件,然后按照说明完成安装。
硬件
转到主菜单中的集成控制器工具。在左侧窗格中选择硬件。
选择主板或电源模块以查看硬件模块的序列号、货号和硬件版本。
导出和导入配置
导出和导入功能用于导出事件和拧紧结果以在外部程序中进行分析,并允许在工具之间传输拧紧程序、批次和工具配置。
导出功能用于:
导出拧紧结果和事件用于进一步处理。
导出日志文件,以用作 Atlas Copco 服务工程师的调试援助。
导出可用于将设置复制到另一个工具的工具配置。
转到主菜单中的集成控制器工具。在左侧窗格中选择导出/导入。
从工具中选择要导出的内容:所有信息或设置和配置。
选择设置和配置时,不会将包含结果或事件的文件导出到存档中。使用此设置,导出所需的时间更少。
选择导出。系统将显示一条选择保存或检索导出文件位置的提示信息。
转到主菜单中的集成控制器工具。在左侧窗格中选择导出/导入。
选择导入。在使用导入功能时,拧紧程序、批次、附件和工具的所有设置都将更新为导入文件的设置。但是,不会导入网络、PIN 以及结果和事件的设置。
在对话框中选择继续以开始导入。
导出的信息和文件格式
导出的文件是包含以下文件的压缩文件存档:
所有信息
IXBExport_<datetime>_Results.csv
IXBExport_<datetime>_Events.csv
ExportInfo.txt
settings/settings.bin
atlas_tool_i.zip
atlas_sys_i.zip
atlas_subsystems_info.zip
atlas_plc.zip
jsonConfigurations.zip
设置和配置
ExportInfo.txt
settings/settings.bin
jsonConfigurations.zip
文件 | 说明 |
|---|---|
IXBExport__<Tool name>_<Time stamp>_Events.csv | 以分号分隔的文件,其中包含以下信息:
|
IXBExport__<Tool name>_<Time stamp>_Results.csv | 以分号分隔的文件,其中包含以下信息:
|
ExportInfo.txt | 有关工具设置和工具软件的信息。 |
settings/settings.bin | 一个包含所有拧紧程序和批次设置、配件配置和工具设置的二进制文件,例如:语言、扭矩单位、日期和时间,以及结果视图。 |
atlas_tool_i.zip | 工具日志(用于调试) |
atlas_sys_i.zip | 来自 IT 应用的日志文件 |
atlas_subsystems_info.zip | 有关子系统软件的信息 |
atlas_plc.zip | PLC 配置 |
jsonConfigurations.zip | 多步骤拧紧和拧松程序 |
根据 IXB 软件中的语言设置,导出的 .csv 文件使用不同的字符来分隔字段。根据计算机中的语言设置,打开导出的 .csv 文件时可能会出现格式问题。为避免出现问题,请始终将工具中使用的语言与计算机的语言相匹配。
有关 IXB 软件的语言格式详细信息,请参见下表:
语言 | 日期/时间 | 字段分隔符 | 数字格式 |
|---|---|---|---|
英语 (en_US) | MM/dd/yyyy hh:mm:ss | , | 123.456 |
捷克语 (cs_CZ) | dd.MM.yyyy hh:mm:ss | ; | 123,456 |
德语 (de_DE) | dd.MM.yyyy hh:mm:ss | ; | 123,456 |
西班牙语 (es_ES) | dd/MM//yyyy hh:mm:ss | ; | 123,456 |
法语 (fr_FR) | dd/MM/yyyy hh:mm:ss | ; | 123,456 |
韩语 (ko_KR) | yyyy-MM-dd hh:mm:ss | , | 123.456 |
意大利语 (it_IT) | dd/MM/yyyy hh:mm:ss | ; | 123,456 |
日语 (ja_JP) | yyyy/MM/dd hh:mm:ss | , | 123.456 |
葡萄牙语(pt_BR) | dd/MM/yyyy hh:mm:ss | ; | 123,456 |
俄语 (ru_RU) | dd.MM.yyyy hh:mm:ss | ; | 123,456 |
瑞典语 (sv_SE) | yyyy-MM-dd hh:mm:ss | ; | 123,456 |
中文 (zh_CN) | yyyy/MM/dd hh:mm:ss | , | 123.456 |
使用设置选项卡
网络配置
可以将工具设置为使用 IPv4 协议从局域网 (LAN) 上的 Web 浏览器进行无线访问。
有一个选项可以将该工具用作客户端、其他设备的访问点或这两者。
取下工具 USB 连接端口的盖子。
将工具连接到 PC 的 USB 端口。
打开一个 Web 浏览器,然后输入 IXB 软件用户界面的地址:169.254.1.1。
配置无线客户端
转到主菜单中的设置,然后在左侧窗格中选择网络。
在无线客户端字段中,选择编辑。
将启用设置为开启。
根据配置将 DHCP 设置为开启或关闭。如果设置为关闭,请填写本地系统管理员提供的所需信息:
IP 地址
子网掩码
网关
输入网络名称 (SSID)。
在安全性字段中,选择模式,然后从列表中选择一种安全性模式。如果选择 WPA2 Personal,请输入安全密钥。
输入安全性参数,并导入证书文件和密钥(如果适用)。
如果适用,在可选设置下添加 DNS 服务器、服务器域和搜索域。
选择应用。
工具将建立与网络的无线连接,并通过工具的蓝色连接 LED 指示灯发出稳定的光来指示。
要通过无线方式访问用户界面,请在 Web 浏览器中键入 IP 地址。
将工具配置为无线接入点
转到主菜单中的设置,然后在左侧窗格中选择网络。
在无线 AP 字段中,选择编辑。
将启用设置为开启。
输入本地系统管理员提供的必需信息:
IP 地址
子网掩码
网关
要分配 IP 地址,请将 DHCP 服务器设置为开启,然后输入 IP 范围开始和 IP 范围停止。
输入网络名称 (SSID)。
在安全性字段中,选择模式,然后从列表中选择一种安全性模式。如果选择 WPA2 Personal,请输入安全密钥。
选择应用。
服务器连接
可以将工具设置为与运行以下 Atlas Copco 软件产品的服务器通信:
ToolsTalk - 用于配置一个或多个控制器和 IXB 工具
ToolsNet - 用于处理结果报告
Atlas Copco 许可证管理器
配置 ToolsTalk 连接
转到主菜单中的设置,然后在左侧窗格中选择服务器连接。
在 ToolsTalk 字段中,设置以下参数:
区域
说明
开/关
启用/禁用与 ToolsTalk 服务器的通讯
服务器端口
ToolsTalk 服务器端口
服务器主机
ToolsTalk 服务器 IP 地址
选择应用。
有关如何配置 ToolsTalk 的信息,请参阅 ToolsTalk 2 用户指南。
配置 ToolsNet 连接
转到主菜单中的设置,然后在左侧窗格中选择服务器连接。
在 ToolsNet 字段中,设置以下参数:
区域
说明
开/关
启用/禁用与 ToolsNet 服务器的通讯
服务器端口
ToolsNet 服务器端口
服务器主机
ToolsNet 服务器 IP 地址
选择应用。
有关如何配置 ToolsNet 的信息,请参阅 ToolsNet 8 用户指南。
配置许可证管理器连接
转到主菜单中的设置,然后在左侧窗格中选择服务器连接。
在 Atlas Copco 许可证管理器字段中,设置以下参数:
区域
说明
开/关
启用/禁用与 Atlas Copco 许可证管理器服务器的通信
服务器端口
Atlas Copco 许可管理器服务器端口
服务器主机
Atlas Copco 许可管理器服务器的 IP 地址
选择应用。
首选项
日期和时间
必须设置日期和时间,以便活动和结果显示时带有正确的时间戳。通过以下三种可用来源中的一种检索时间:
手动 - 手动设置日期、时间和时区。
NTP - 日期和时间从用户界面中定义的 NTP(网络时间协议)服务器中检索。
ToolsNet - 从 ToolsNet 服务器检索日期和时间。
转到主菜单中的设置,然后在左侧窗格中选择偏好。
在日期和时间字段中,设置以下参数:
参数
说明
源
获取时间的起始源。
NTP Server 1
NTP 服务器的 IP 地址为工具提供日期和时间。
服务器 1 状态
OK/否状态
NTP Server 2
NTP 服务器的 IP 地址为工具提供日期和时间。
服务器 2 状态
OK/否状态
日期
如果将来源设为手动,则需手动输入日期。
时间
如果将来源设为手动,则需手动输入时间。
时间区
时间区既可为本地时区,也可为 UTC 等标准时区(协调世界时)
选择应用。
设置语言
用户界面可以是以下 12 种语言:
英语
捷克语
德语
西班牙语
法语
韩语
意大利语
日语
葡萄牙语
俄语
瑞典语
中文
转到主菜单中的设置,然后在左侧窗格中选择偏好。
在语言字段中,选择当前使用的语言,然后从列表中选择一种语言。
语言更改立即生效。
设置扭矩单位
执行拧紧后以及在结果列表中存储后,扭矩结果将以选定的单位显示。
单位 | 说明 |
|---|---|
cNm | 百分之一牛顿米 |
dNm | 十分之一牛顿米 |
Nm | 牛顿米 |
kNm | 千牛顿米 |
in·lbf | 英寸-磅力 |
ft·lbf | 英尺-磅力 |
in·ozf | 英寸-盎司力 |
ft·ozf | 英尺-盎司力 |
gf·cm | 克力-厘米 |
kgf·cm | 千克力-厘米 |
kgf·m | 千克力-米 |
转到主菜单中的设置,然后在左侧窗格中选择偏好。
在扭矩单位字段中,选择当前使用的单位,然后从列表中选择一个单位。
扭矩单位更改立即生效。
设置温度单位
转到主菜单中的设置,然后在左侧窗格中选择偏好。
在温度单位字段中,选择当前使用的单位,然后从列表中选择 C° 或 F°。
设置启动屏幕
工具启动时的默认屏幕为主屏幕。可以将启动屏幕更改为结果屏幕。要更改设置的启动屏幕,需要重新启动工具或刷新用户界面。
转到主菜单中的设置,然后在左侧窗格中选择偏好。
在启动屏幕字段中,选择当前使用的启动屏幕,然后从列表中选择主屏幕或结果屏幕。
配置 PIN 设置
使用 PIN 码可防止未授权使用或意外改动工具。可以将多个用户添加到工具,每个用户设有独立的 PIN。注意:PIN 码未与工具配置关联,主要用于登录原因。
PIN 必须为 0000–9999 范围内的四位数。启用 PIN 且已达到配置的不活动时间后,将无法编辑工具配置。工具最多可以添加 10 个用户。
对 PIN 进行更改后,将记录进行更改的用户。这将显示在更改人列中,并添加到更改历史记录中。
激活 PIN 后,从 Web 用户界面访问该工具时需要输入 PIN 码。如果没有输入正确的 PIN,则用户界面将只能读取,而不能编辑。
转到主菜单中的设置,然后在左侧窗格中选择 PIN。选择配置。
将 PIN 码开关设为开启。
只有在列表中启用至少一个用户后,才可以启用 PIN。如果未启用用户,会出现一条警告信息。
填写不活动超时(单位:秒),以设置在不活动时锁定工具的时间。
不活动超时的默认值为 120 秒。注意:此为全局设置,无法按用户设定。
转到主菜单中的设置,然后在左侧窗格中选择 PIN。选择配置。
选择右上角的 + 图标。
选择名称字段以编辑条目。
在用户窗口中,输入一个名称。
为用户输入 PIN 并确认 PIN。PIN 必须为 0000–9999 范围内的四位数。
两个字段(输入 PIN和确认 PIN)中的 PIN 需要与应用的更改相符。
选择应用。
在用户列表中,选中用户名左侧的复选框以启用用户。
启用 PIN 时,工具将在配置的不活动超时后自动锁定。
要禁用 PIN/用户,请清除用户名左侧的复选框。
转到主菜单中的设置,然后在左侧窗格中选择 PIN。选择配置。
在用户字段中,选中用户名左侧的复选框以启用用户。
启用 PIN 时,工具将在配置的不活动超时后自动锁定。
要禁用 PIN/用户,请清除用户左侧的复选框。
注意:选择用户名并分别将启用开关设为开启或关闭,还可以启用和禁用 PIN。
转到主菜单中的设置,然后在左侧窗格中选择 PIN。选择配置。
在用户字段中,选择用户名右侧的红色减号图标。
选择右上角的挂锁图标。
一个带有键盘的对话框将出现。输入 PIN 码,然后选择确定。
启用 PIN 并且屏幕解锁后,用户界面右上角会出现一个打开的挂锁图标。
通过选择打开的挂锁图标,可以再次手动锁定用户界面。
配置警报
警报设置为控制何时对工具执行维护或校准。
工具的保养间隔、校准详细信息和其他相关信息可在集成控制器工具 > 工具菜单中找到。
转到主菜单中的设置,然后在左侧窗格中选择 警报。
在维护字段中,设置以下参数:
参数
说明
保养指示灯警报
开启/关闭:在达到工具的保养周期时启用/禁用警报。
报警后工具被锁定
开启/关闭:保养间隔到期时启用/禁用工具锁定。
转到主菜单中的设置,然后在左侧窗格中选择 警报。
在校准字段中,将校准警报设置为开启/关闭以启用/禁用它。
配置事件
每个事件都有一个默认设置,规定其是否应该确认 (Ack)、记录 (Log) 或显示 (Disp)。
某些选项无法更改。它们将呈灰显状态。
转到主菜单中的设置,然后在左侧窗格中选择 事件。
选择配置事件。
通过在搜索字段中输入事件代码并按 Enter,搜索要配置的事件。
根据需要勾选或取消勾选 ACK、 LOG 和 DISP 框。
如果适用,请在详细信息字段中添加有关事件的信息。
执行出厂重置
可以将工具重新恢复到原厂设置。
在重置工具时将删除所有设置、配置和历史数据。只有在完全确定需要此项操作时才执行出厂重置。
转到主菜单中的设置,然后在左侧窗格中选择恢复出厂设置。
选择重置按钮
将出现一个对话框,警告所有数据将被删除。选择是。
工具将重启,以启用新设置。
报告和统计信息
在本节中,您可以了解可用的报告和统计信息。
使用报告选项卡
查看结果
本节介绍如何访问工具上的拧紧结果以及如何读取不同结果视图中给出的信息。
执行拧紧时,结果被存储在工具中。也可使用导出功能,将结果发送至诸如 ToolsNet 之类的外部系统或导出供分析。有关使用 ToolsNet 进行统计分析、结果过滤和拧紧分析的更多信息,请参阅 ToolsNet 用户指南。
实时结果和存储的结果
实时结果对话框会在出现时在屏幕上显示工具的结果。拧紧完成后,拧紧结果也会自动存储在工具中。
每个任务显示为一个结果。单次拧紧的结果可以以表格形式(含关键参数)或拧紧图形的形式显示。批次序列按照执行顺序显示所有单独的拧紧。
转到主菜单中的报告,然后在左侧窗格中选择结果。
选择查看所有结果。结果列表将显示关于以下内容的信息:
日期 - 执行拧紧的日期和时间。
拧紧程序 - 拧紧程序或批次/拧紧程序。
结果详情 - 扭矩或角度结果,以及结果状态。
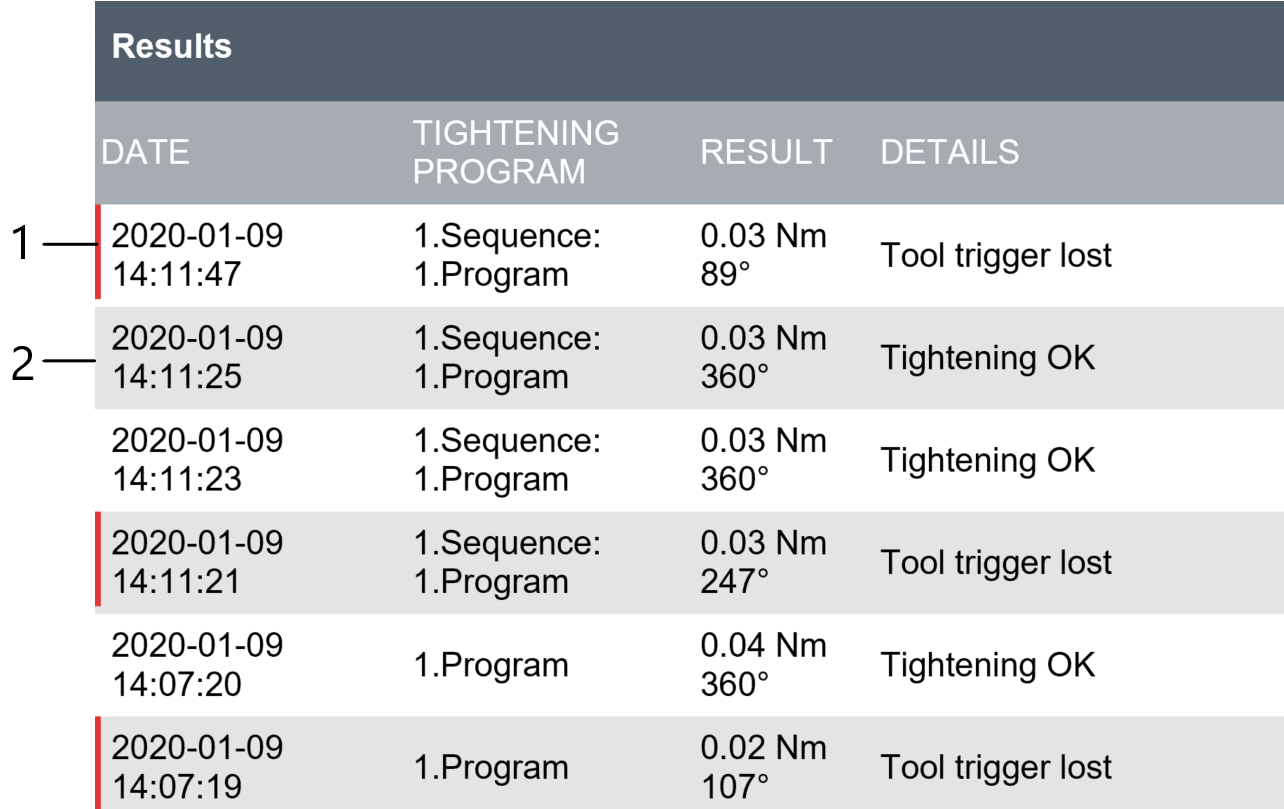
1
NOK 拧紧
2
OK 拧紧
有关 NOK 结果的说明,请参见 NOK 结果列表。
点击列表中的项目以打开一个对话框,通过点击结果窗口侧面的箭头,可以逐步浏览不同的结果视图。
可用的结果视图
通过在结果对话框中选择向右和向左箭头,可以逐步浏览不同的结果视图。本节详细介绍了不同的结果视图。
结果视图 1:以数字表示的结果
第一个窗口显示以数字表示的结果:
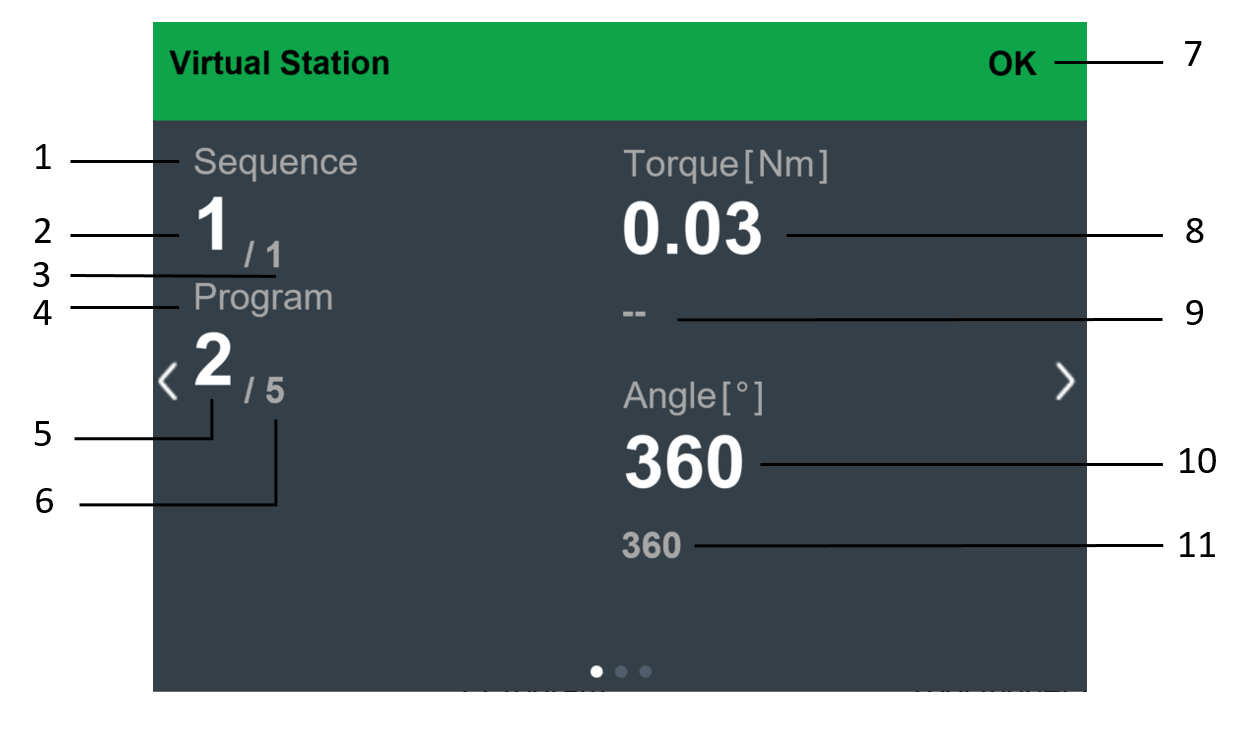
位置 | 说明 |
|---|---|
1 | 批次序列名称 |
2 | 序列中已完成的批次数量 |
3 | 序列中的批次总数 |
4 | 拧紧程序名称 |
5 | 批次中完成的拧紧次数 |
6 | 批次中的拧紧总数 |
7 | 结果状态 |
8 | 拧紧结果 |
9 | 目标扭矩 |
10 | 拧紧结果 |
11 | 目标角度 |
结果视图 2:延伸结果
扩充结果视图会显示一些额外的拧紧结果。

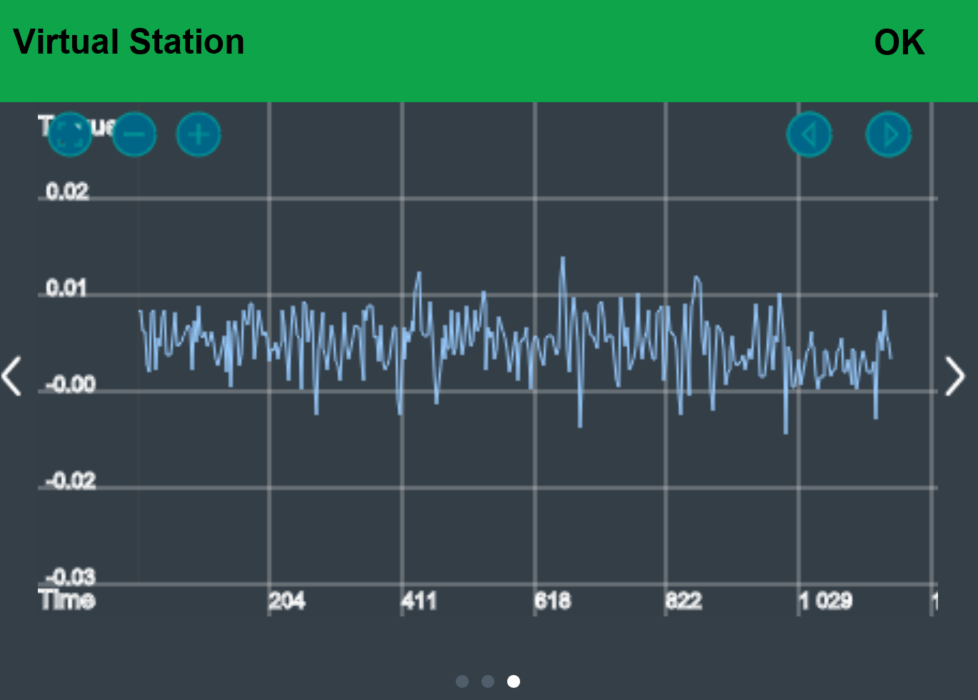
结果视图 3:绘制图结果
在视图中,可更好地了解拧紧行为,以对拧紧程序进行调整。根据拧紧策略,绘制图将显示不同的拧紧参数。
跟踪结果能够以不同的图形呈现:
扭矩/时间
角度/时间
扭矩/角度
当前时间
当前/角度
实时结果视图

位置 | 说明 |
|---|---|
1 | 目标扭矩 |
2 | 拧紧结果 |
3 | 拧紧结果 |
4 | 目标角度 |
5 | 结果状态 |
6 | NOK 拧紧会给出未成功拧紧的详细状态。 |
7 | 序列中已完成的批次数量 |
8 | 批次序列名称 |
9 | 序列中的批次总数 |
10 | 序列中每个已完成批次的结果:
|
11 | 批次中完成的拧紧次数 |
12 | 拧紧程序名称 |
13 | 批次中的拧紧总数 |
14 | 批次中完成的拧紧次数:
|
NOK 结果列表
错误消息 | 说明 | 所需步骤类别 | 报告步骤监视器 | 报告步骤限制 | 报告程序监视器 | 报告程序限制 |
|---|---|---|---|---|---|---|
驱动错误 | 内部驱动器错误或在拧紧期间取出电池 | |||||
重复拧紧 | 试图拧紧已拧紧的螺栓。 | 重复拧紧 | ||||
软启动扭矩低于最小值 | 软启动扭矩低于最小水平。 | 软启动 | 峰值扭矩 | 角度内扭矩窗口 | ||
软启动扭矩超过最大值 | 软启动扭矩超过最大水平。 | 软启动 | 峰值扭矩 | 最大扭矩 | 最大扭矩限值 | |
旋入扭矩超过最大值 | 旋入扭矩超过最大水平。 | 旋入 | 峰值扭矩 | 最大扭矩 | 最大扭矩限值 | |
旋入角度超过最大值 | 旋入角度超过最大水平。 | 旋入 | 角度 | 最大角度 | ||
旋入超过最大时间限值 | 旋入时间超过最大限值。 | 旋入 | 时间 | 最大时间 | ||
旋入低于最小时间限制 | 旋入时间低于最小限值 | 旋入 | 时间 | |||
旋入扭矩低于最小值 | 旋入扭矩低于最小水平。 | 旋入 | 峰值扭矩 | 角度内扭矩窗口 | ||
旋入角度低于最小值 | 旋入角度低于最小水平 | 旋入 | 角度 | |||
最终步骤扭矩超过最大值 | 最终步骤扭矩超过最大水平。 | 最终 | 峰值扭矩 | 最大扭矩 | 扭矩 | 最大扭矩限值 |
最终步骤角度超过最大值 | 最终步骤角度超过最大水平。 | 最终 | 角度 | 最大角度 | 角度 | |
最终步骤扭矩低于最小值 | 最终步骤扭矩低于最小水平。 | 最终 | 峰值扭矩 | 角度内扭矩窗口 | 扭矩 | |
最终步骤角度低于最小值 | 最终步骤角度低于最小水平。 | 最终 | 角度 | 角度 | ||
拧紧超时 | 超过拧紧时间限值。 | 最大时间限值 | ||||
触发器丢失 | 达到目标前工具触发器已松开。 | |||||
滑脱 | 套筒从螺母上滑脱。 | 取消扭矩 | ||||
后视图扭矩低于最小值 | 后视图扭矩低于最小水平。 | 返回查看扭矩低 | ||||
后视图扭矩超过最大值 | 后视图扭矩超过最大水平。 | 返回查看扭矩高 | ||||
未达到后视图扭矩间隔 | 未达到后视图扭矩间隔。 | 后视图扭矩低 | ||||
未达到扭矩补偿区间 | 在未达到旋入端前的扭矩补偿间隔角度 | 有效扭矩 | ||||
当前监控错误 | 扭矩与电流偏差超过最大水平。 | 扭矩与电流偏差 | ||||
软启动角度超过最大值 | 软启动角度超过最大水平。 | 软启动 | 角度 | 最大角度 | ||
软启动角度低于最小值 | 软启动角度低于最小水平 | 软启动 | 角度 | |||
最初步骤角度高 | 第一步角度超过最大水平 | 首页 | 角度 | 最大角度 | ||
最初步骤角度低 | 第一步角度低于最小水平 | 首页 | 角度 | |||
最初步骤扭矩高 | 第一步扭矩超过最大水平 | 首页 | 峰值扭矩 | 最大扭矩 | 最大扭矩限值 | |
初始步骤扭矩低于最小值 | 第一步扭矩低于最小水平 | 首页 | 峰值扭矩 | 角度内扭矩窗口 | ||
初始步骤超过最大时间限制 | 第一步时间超过最大水平 | 首页 | 时间 | 最大时间 | ||
初始步骤低于最小时间限制 | 第一步时间低于最小水平 | 首页 | 时间 | |||
最终步骤超过最大时间限制 | 最终步骤时间超过最大水平 | 最终 | 时间 | 最大时间 | ||
最终步骤低于最小时间限制 | 最终步骤时间低于最小水平 | 最终 | 时间 | |||
软启动超过最大时间限制 | 软启动时间超过最大水平 | 软启动 | 时间 | 最大时间 | ||
切断时的电流超过最大限值 | 测得的切断电流超过最大限值 | 切断电流 | ||||
切断时的电流低于最小限值 | 测得的切断电流低于最小限值 | 切断电流 |
查看事件
事件用于通知用户,系统中某些状态发生变化或出现某些状态。它们分为三种类型:信息、警告和错误,需要采取不同的措施。
每个事件都有一个默认设置,规定其是否应该确认 (Ack)、记录 (Log) 或显示 (Disp)。这些设置可以在事件下的设置菜单中进行配置。
转到主菜单中的报告,然后在左侧窗格中选择结果。
选择查看所有事件。
在列表中选择一个事件以打开事件对话框。
事件对话框
事件对话框包含有关发生的事件的信息,描述发生了什么,何时何地。

位置 | 说明 |
|---|---|
1 | Heading(标题) - 描述事件发生在系统的哪个部分。 |
2 | Event name(事件名称) - 对事件进行的简短描述。 |
3 | Code(代码) - 具有唯一性的四位数字编号,用于区分事件。 |
4 | Module(模块) - 描述事件发生在系统的哪个部分。 |
5 | Type(类型) - 信息、警告或错误。 |
6 | Time(时间) - 事件发生的日期和时间。 |
事件代码
事件用于通知用户,系统中某些状态发生变化或出现某些状态。它们的类型不同,需要采取不同的行动处理。
上述的部分过程只能由 Atlas Copco 授权的服务提供商执行。
事件代码组
事件代码可以分为以下几组:
事件代码 | 组 | 说明 |
|---|---|---|
1000-1999 | 控制器,工具 | 控制器和工具事件。 |
2000-2999 | 工具 | 工具事件。 |
3000-3999 | 控制器、驱动器、通道、配置 | 控制器与驱动器事件,以及步骤同步事件。 |
4000-4999 | 过程 | 拧紧过程事件。 |
5000-5999 | 配置 | 程序配置事件。 |
6000-6999 | 配件 | 配件事件。 |
7000-7999 | 消息 | 消息。 |
事件代码列表说明
下表描述了事件代码列表中的信息:
项目 | 说明 | |
|---|---|---|
事件代码 | 唯一事件编号。 | |
类型 | 事件类型:
| |
名称 | 事件的描述性名称。 | |
说明 | 对事件及其发生原因的简短描述。 | |
程序 | 如果适用,步骤中会包含关于如何清除事件的说明。 | |
A | 确认:告知用户该事件是否需要确认,然后才能继续。此列表中的值为默认值。 | |
L | 记录:告知用户该事件是否要保存在事件日志中。此列表中的值为默认值。 | |
D | 显示:告知用户该事件是否要显示在屏幕上。此列表中的值为默认值。 | |
事件代码列表
事件 | 说明 | 程序 | 日志 | Display | 确认 | ||
|---|---|---|---|---|---|---|---|
代码 | 类型 | 名称 | |||||
1000 | 信息 | 控制器已启动 | 控制器已启动。 | 不适用 | X |
|
|
1001 | 警告 | 控制器序列号已更新 | 如果 IT 板盒序列号(控制器序列号)不同于 AUX 板盒序列号,会在启动时生成。AUX 板盒在现场视为不可替代。控制器在更新序列号时将会重启。 | 更换 IT 板或盒。 | X | X | X |
1010 | 信息 | 工具已连接 | 工具已连接。 | 不适用 | X | X |
|
1011 | 信息 | 工具已断开 | 工具已断开。 | 不适用 | X | X |
|
1012 | 信息 | 工具连接被拒绝 | OpenProtocol 工具拒绝了控制器连接。 | 检查是否有另一个控制器连接到该工具。 | X | X |
|
2000 | 警告 | 电池电量低 |
| 更换电池。 | X | X |
|
2001 | 警告 | 电池电量用完 |
| 更换电池。 | X | X |
|
2002 | 警告 | 工具电池健康状态低 | 检测到工具电池存在健康问题。 | 更换电池 | X | X | |
2004 | 警告 | 工具为非首选类型 | 工具已被具有不同最大扭矩的工具替换。 | 更改工具 |
|
| |
2006 | 警告 | 工具备用电池健康状态低 | 工具中的备用电池性能太差。 | 应更换备用电池。 | X |
| X |
2007 | 警告 | 工具备用电池丢失 | 工具备用电池缺失。 | 插入电池 | X | X | |
2008 | 警告 | 工具备用电池错误 | 检测到工具备用电池错误。 | 更换电池 | X | X | |
2009 | 警告 | 备份电池电压低 | 控制器备份电池电量几乎耗尽 | 更换电池 | X | X | |
2010 | 错误 | 工具软件版本不匹配 | 工具和控制器软件版本不兼容。 | 请对工具进行维修 - 更新工具软件。 | X | X | X |
2012 | 警告 | 工具通信干扰 | 工具和控制器之间的通信中断。 | 重新定位天线布置。 | X |
|
|
2013 | 警告 | 方向选择环位置错误 | 工具方向开关位于故障位。 | 如果频繁出现 - 请对工具进行维修。 | X | X |
|
2014 | 警告 | 工具过热 | 工具过热。 | 让工具冷却。 | X | X |
|
2015 | 错误 | 工具温度传感器错误 |
| 维修工具。 | X | X | |
2016 | 警告 | 工具脉冲装置过热 | 工具脉冲装置过热。工具未锁定,但是只要工具脉冲装置温度超过阈值,工具启动时就会显示警告。 | 让工具冷却 | X | X | |
2019 | 警告 | 工具无法启动电机 | 工具电机故障。 | X | X | ||
2020 | 警告 | 工具需要电机调谐 | 工具需要电机调谐。 | 执行电机调谐。 | X | X |
|
2021 | 警告 | 电机调谐失败 | 电机调谐失败。 | 完成电机调谐或请对工具进行维修。 | X |
|
|
2022 | 信息 | 电机调谐完成 | 电机调谐完成。 | 不适用 | X |
|
|
2023 | 警告 | 工具需要开口端调整 | 工具需要开口端调整。 | 执行开口端调整。 | X | X |
|
2024 | 警告 | 开启开口端失败 | 开启端调整失败。 | 尝试再执行一次开头端调整。如果又失败了,请对工具进行维修。 | X |
|
|
2025 | 信息 | 开启开口端成功 | 开口端调整成功。 | 不适用 | X |
|
|
2026 | 警告 | 开口端失败 | 开口端位置失败。 | 再次按下触发器,并等待定位完成。如果又失败了,请对工具进行维修。 | X | X |
|
2027 | 警告 | 由于工具温度高,使用受到限制 | 已达到温度极限。拧紧已被禁止,以减少由于过热而导致工具关闭的风险。 | 等待直到工具温度降低。 | X | X |
|
2030 | 错误 | 工具内存故障 – 更改工具 | 工具存储器损坏。 | 维修该工具。 | X | X | X |
2031 | 错误 | 工具配件内存损坏 | 工具配件存储器损坏。 | 维修工具配件。 | X | X | X |
2040 | 错误 | 系统检查失败 |
| X | X | X | |
2041 | 错误 | 扭矩传感器错误 | 校准错误或工具报告传感器错误时会生成该错误。 | 维修该工具。 | X | X |
|
2042 | 错误 | 角度传感器错误 |
| 维修该工具。 | X | X | X |
2043 | 错误 | 工具接地故障报错 |
| 维修该工具。 | X | X | X |
2044 | 信息 | 工具保养间隔已过 | 表示需要对工具进行保养。超过设定的拧紧数时触发。 | 执行工具维修。 | X | X |
|
2045 | 警告 | 工具校准数据无效 | 如果校准数据验证失败。 | 维修工具。 | X | X |
|
2046 | 信息 | 已过了工具下一次校准日期 | 表示需要使用标定工具。在设置中启用校准警报并且当前时间大于下次校准日期时,会触发校准工具。 | 维修工具。 | X | X |
|
2047 | 信息 | 自动更新服务数据校验和 | 表示服务数据校验和已自动更新。 | 不适用 | X | X |
|
2048 | 信息 | 工具校准值通过 QA 设备更新 | 使用 QA 设备执行校准时,工具校准会得到更新 | X | X | ||
2050 | 错误 | 工具参数文件不受支持 | 所需的工具参数缺失。 | 更新工具参数。 | X | X |
|
2060 | 信息 | 意外触发行为 | 用于防止连接了配件的工具启动。 | 不适用 | X | X |
|
2071 | 错误 | 工具内存损坏 | 工具描述符已损坏。 | 维修该工具。 | X | X |
|
2072 | 信息 | 未知的设备已连接 |
| X | X |
| |
2073 | 警告 | 工具触发器监管失效 | HW 通道故障。工具触发器的硬件监管和软件监管不匹配。 | X | X |
| |
2074 | 警告 | 工具标识电路板故障 | 工具标识电路板故障。 | 维修该工具。 | X | X |
|
2075 | 警告 | 工具风扇电压故障 | 工具风扇电压故障。 | 维修该工具。 | X | X |
|
2076 | 警告 | 工具配件总线电压故障 | 工具配件总线电压故障。 | 维修该工具。 | X | X |
|
2077 | 警告 | 工具触发器传感器错误 | 工具触发器传感器错误。 | 维修该工具。 | X | X | |
2078 | 信息 | 工具拧紧程序已更新 | 工具因拧紧程序更新而锁定。 | X | X |
| |
2079 | 错误 | 工具线缆不受支持 | 工具线缆已损坏。线缆的插头不对应或已受损。 | 切换线缆。 | X | X |
|
2080 | 错误 | 工具电池故障 | 直流电压太高或太低。电池故障。 | 联系 Atlas Copco 服务代表并将电池送回 Atlas Copco(不得重复使用!)。 | X | X |
|
2081 | 错误 | 达到工具电流限值 | 达到电流限值且驱动装置会被禁用。 | 维修该工具。 | X | X |
|
2082 | 错误 | 工具电流测量值有误差 | 电流测量值有误差。无法测得可靠的电流结果。 | 维修该工具。 | X | X |
|
2083 | 错误 | 工具内部错误 | 各种内部硬件错误。 | 维修该工具。 | X | X |
|
2084 | 错误 | 工具内部软件错误 | 各种内部软件错误。 | 维修该工具。 | X | X |
|
2085 | 错误 | 工具 RBU 错误 | 工具软件检测到 RBU 错误。 | 检查当前是否安装了 RBU。如果错误仍然存在,请对工具进行维修。 | X | X |
|
2086 | 错误 | 工具停转 | 工具电机停转。 | 维修该工具。 | X | X |
|
2087 | 警告 | 工具电机电流高 | 工具电机电流超过限值,工具被锁定。工具将进入故障保护模式。 | X | X | ||
2088 | 警告 | 工具电池电流高 | 工具电池电流过高。 | X | X | ||
2089 | 警告 | 工具驱动电压低 | 工具驱动电压低于监控的电压下限。 | X | X | ||
2090 | 警告 | 工具驱动电压高 | 工具驱动电压高于监控的电压上限。 | X | X |
| |
2091 | 警告 | 工具主板错误 | 工具主板内部错误。 | X | X | ||
2092 | 警告 | 工具电源模块错误 | 工具电源模块内部错误。 | X | X | ||
2093 | 警告 | 脉冲单元油位低 | 所连接脉冲工具的油位低。 | 维修该工具 | X | X | |
2094 | 警告 | 脉冲单元油位空 | 所连接脉冲工具的油位低于所需的工作油位 | 维修该工具 | X | X | X |
2095 | 警告 | 工具电池通信丢失 | 工具丢失与电池的通信。 | 确保电池正确安装。否则请更换电池 | X | X | |
2096 | 错误 | 工具电池软件版本不匹配。 | 工具电池软件与工具软件不兼容。 | 更新软件。 | X | X | |
2100 | 信息 | STwrench smartHead 已移除 | 已删除 STwrench smartHead。 | 重新连接 smartHead 并重启扳手。 | X | X |
|
2101 | 警告 | 锁定时扳手拧紧 | 当工具状态锁定在控制器中时,执行扳手拧紧操作。 | 等待直到控制器中的工具状态解锁。 | X | X |
|
3000 | 错误 | 控制器内部软件错误 | 控制器软件错误。 | 联系服务人员。 | X | X | X |
3001 | 错误 | 控制器时钟电池电量耗尽 | 内部电池接近使用寿命极限。 | 更换电池 | X | X | X |
3010 | 警告 | 系统过热 | 控制器过热。 | 降温。 | X | X |
|
3011 | 警告 | 驱动器过热的控制器硬件 | 降温。 | X | X | ||
3013 | 警告 | 由于控制器温度高,使用受到限制 | 已达到温度极限。禁止拧紧以减少由于过热而导致控制器关闭的风险。 | 等待直到控制器温度降低。 | X | X | |
3020 | 警告 | 控制器硬件故障 | X | X | |||
3021 | 警告 | 系统电压问题 | 直流电压太高或太低。 | 不适用 | X | X |
|
3030 | 错误 | IP 地址与网络上的另一个节点冲突 | 设置的 IP 地址已经被同一网络上的其他设备占用。 | 更改其中一个设备的 IP 地址。 | X | X |
|
3031 | 信息 | 网线断开 | 工厂端的载体已丢失(电缆断开连接)。 | 检查线缆连接。 | X | X |
|
3032 | 信息 | 配对已启动 | 工具配对已启动。 | 不适用 | X | X |
|
3033 | 信息 | 配对成功 | 工具配对成功。 | 不适用 | X | X |
|
3034 | 错误 | 配对不成功:找不到工具 | 扫描射频点时未发现任何可与控制器配对的工具。 | 将工具设为配对模式并重试。 | X | X |
|
3035 | 错误 | 配对不成功:检测到不止一个工具 | 扫描射频点时,控制器找到的工具多于一个 | 控制器开始配对模式时,应确保只有一个工具处于配对模式下。 | X | X |
|
3036 | 错误 | 配对不成功:通信错误 | 配对过程中,发生控制器连接中断、意外的应答或超时问题。 | 再次尝试执行配对。如果又失败了,请对工具进行维修。 | X | X |
|
3037 | 信息 | 配对不成功:工具插槽已满 | 清除一个工具插槽 | X | X | ||
3040 | 警告 | 紧急停机 | 因紧急停机,驱动装置被禁用。 | 重置紧急停机。 | X | X |
|
3050 | 信息 | 系统时钟已更新 | 系统时钟已更新。 | 不适用 | X |
|
|
3051 | 错误 | 系统时钟错误 | 实时时钟 (RTC) 硬件的时间读数错误。 | 更换 RTC 的电池。 | X | X | X |
3052 | 警告 | 远程启动配置出错 | HW 与 SW 的远程启动配置不匹配。 | 检查并校验 HW 指拨开关是否与选定启动来源相匹配。 | X | X |
|
3053 | 信息 | 驱动器已连接 | StepSync 驱动器已连接。 | X | X | ||
3054 | 信息 | 驱动器已断开连接 | StepSync 驱动器已断开连接。 | X | X | ||
3055 | 警告 | 模式配置错误 | 当选定的模式错误配置时生成。例如,使用相同的螺栓编号或相同的通道配置两个螺栓,不完整的模式配置 | 查看 Toolstalk2,了解模式配置错误 | X | X | |
3056 | 警告 | 无法启动,工具或驱动器丢失 | 当已使用的通道缺失驱动器或工具时生成。 | 查看 HMI 上的通道菜单。连接丢失的驱动或工具。 | X | X | |
3057 | 信息 | 无法启动,通道已在使用中 | 当所需的通道被分配给另一个虚拟站点时生成 | X | X | ||
3058 | 信息 | 未选择模式 | 选择模式 | X | X | ||
3059 | 警告 | 连接 Atlas Copco 许可证管理器失败 | 表明控制器未能连接到本地许可证管理器来获得许可证。 | 查看本地网络。如果再次失败,请对控制器进行维修。 | X | X |
|
3084 | 错误 | Soft PLC 运行时间错误 | eCLR 以不受控的方式终止。 | X | X | ||
3150 | 错误 | 软件 IAM 不兼容性 | IAM 与控制器上安装的软件不兼容。 | 更换 IAM。 | X | X | X |
3160 | 错误 | 无法激活新安装的软件 | 激活期间出现问题。当新安装的软件启动时,会发生回退到以前的工作软件的情况。当新软件启动失败三次且仅在软件安装过程中时,就会发生这种情况。 | 进行导出,并联系 Atlas Copco 以获得更多帮助。记下您要安装的软件版本以及正在运行的软件版本。 | X | X | X |
3161 | 错误 | 在非预期的软件分区上启动 | 控制器已在不活动的软件侧启动,而非在预期的软件侧启动。 | 记下软件信息(在控制器的主页,选择控制器 > 软件)。尝试重新启动控制器,并确保再次启动时在正确的软件上运行。如果错误仍然存在,请进行导出并联系 Atlas Copco。 | X | X | X |
3500 | 错误 | 通用许可管理器错误 | 在使用的功能管理系统中检测到不一致。 | 请联系 Atlas Copco 代表。 | X | X | X |
3501 | 错误 | 许可证管理器同步错误 |
| X | X | X | |
3502 | 信息 | 许可证管理器同步已完成 |
| X |
| ||
3503 | 警告 | 许可证管理器:另一个来源正在使用 | 许可证被其他来源使用。 | 检查许可证分配 | X | X | |
3504 | 警告 | 需要重启许可证管理器 | 重启许可证管理器 | X | X | ||
3505 | 信息 | USB 许可证同步已启动 | X | ||||
3506 | 错误 | USB 许可证同步错误 | X | ||||
3507 | 信息 | USB 许可证同步已完成 | X | ||||
3508 | 信息 | 您的一个或多个许可证即将过期。请确保您已配置许可证服务器。 | 更新许可证 | X | X | ||
3511 | 警告 | 您的一个许可证具有不同的许可证定义 | 在要使用的许可证中检测到不一致。 | 请联系 Atlas Copco 代表。 | X | X | |
3550 | 警告 | 许可证丢失 | 安装正确的许可证 | X | X | ||
4010 | 信息 | 工具被数字输入锁住 | 通过数字输入信号锁定工具。 | 不适用 | X | X |
|
4011 | 信息 | 工具被开发协议锁定 | 通过开放协议锁定工具。 | 不适用 | X | X |
|
4012 | 信息 | 工具被现场总线锁定 | 通过现场总线锁定工具。 | 不适用 | X | X |
|
4013 | 信息 | 工具由套筒选择器锁定 | 套筒选择器与虚拟站点断开连接时工具被锁定。 | 通过主机解锁将工具解锁 | X | X | |
4014 | 信息 | 工具由 Soft PLC 锁定 | Soft PLC 信号锁定了工具。 | 通过主机解锁将工具解锁 | X | X | |
4015 | 信息 | 拧松被禁用 | 在拧紧程序中禁用拧松 | X | X |
| |
4016 | 信息 | 拧紧已禁用 |
| X | X |
| |
4017 | 信息 | 拧松未配置 | 所选的拧紧程序未配置拧松 | 选择不同的拧紧程序 | X | X | |
4020 | 信息 | NOK 拧紧过多 | 超过了批次中的最大持续 NOK 拧紧 | X | X |
| |
4025 | 信息 | 未选择拧紧程序 | 未选择拧紧程序。 | 选择拧紧程序或批次序列。 | X | X | |
4030 | 信息 | 批次序列中止 | 批次序列已中止。 | X | X | ||
4031 | 信息 | 完成批次序列所需的最大时间。 |
| X | X |
| |
4032 | 信息 | 完成首次拧紧所需的最大时间。 |
| X | X |
| |
4035 | 信息 | 通过线路控制锁定 |
| X | X |
| |
4040 | 信息 | 经备用标识符锁定 | 工具被备用标识符锁定。 | X | X |
| |
4050 | 无效的套筒配置 | 拧紧程序分配给多个套筒。 | 拧紧程序分配给多个套筒 | X | X |
| |
4060 | 信息 | 工具在批次完成时锁定 | 当批次序列完成时借助标记工具锁定批次时,本事件会在用户按下触发器时生成。 | 在完成时采用信号解锁工具解锁。 | X | X |
|
4070 | 信息 | 进程进入手动模式 | 表明已为虚拟站点启用手动模式 | ||||
4071 | 信息 | 进程进入自动模式 | 表明已为虚拟站点启用自动模式 | ||||
4500 | 信息 | 结果 - 驱动故障 | 检测到内部驱动故障或驱动丢失。 |
|
|
|
|
4501 | 信息 | 结果 - 重复拧紧 | 在重复拧紧检测功能开启时试图拧紧已拧紧的螺栓。 |
|
|
|
|
4502 | 信息 | 结果 - 软启动扭矩较低 | 软启动扭矩低于最小水平。 |
|
|
|
|
4503 | 信息 | 结果 - 软启动扭矩较高 | 软启动扭矩超过最大水平。 |
|
|
|
|
4504 | 信息 | 结果 - 自攻扭矩较高 | 自攻扭矩超过最大水平。 |
|
|
|
|
4505 | 信息 | 结果 - 自攻扭矩较低 | 自攻扭矩低于最小限值。 |
|
|
|
|
4506 | 信息 | 结果 - 安全扭矩较低 | 自动计算扭矩值,确保正确安装扭矩传感器。 |
|
|
|
|
4507 | 信息 | 结果 - 旋入扭矩较高 | 旋入扭矩超过最大水平。 |
|
|
|
|
4508 | 信息 | 结果 - 旋入角度较高 | 旋入角度超过最大水平。 |
|
|
|
|
4509 | 信息 | 结果 - 旋入时间较高 | 旋入时间超过最大限值。 |
|
|
|
|
4510 | 信息 | 结果 - 旋入时间较低 | 旋入时间低于最小限值。 |
|
|
|
|
4511 | 信息 | 结果 - 旋入扭矩较低 | 旋入扭矩低于最小水平。 |
|
|
|
|
4512 | 信息 | 结果 - 旋入角度较低 | 旋入角度低于最小水平。 |
|
|
|
|
4513 | 信息 | 结果 - 最终扭矩较高 | 最终步骤扭矩超过最大水平。 |
|
|
|
|
4514 | 信息 | 结果 - 最终角度较高 | 最终步骤角度超过最大水平。 |
|
|
|
|
4515 | 信息 | 结果 - 最终扭矩较低 | 最终步骤扭矩低于最小水平。 |
|
|
|
|
4516 | 信息 | 结果 - 最终角度较低 | 最终步骤角度低于最小水平。 |
|
|
|
|
4517 | 信息 | 结果 - 拧紧超时 | 超过拧紧时间限值。一般拧紧策略的最大拧紧时间为 30 秒。多步骤的最大拧紧时间取决于步骤的最大时间限制。故障代码取决于拧紧阶段。 | 重新拧紧。 |
|
|
|
4518 | 信息 | 结果 - 触发器丢失 | 达到目标前工具触发器已松开。 对于一般拧紧策略,拧紧阶段完成之前不允许释放触发器。 对于多步骤,达到具体步骤的目标之前丢失触发器将显示故障。 |
|
|
|
|
4519 | 信息 | 早期扭矩丢失 | 套筒从螺母上滑脱。 |
|
|
|
|
4520 | 信息 | 结果 - 在最终步骤前达到目标 | 在拧紧程序的最终步骤前达到目标扭矩。 |
|
|
|
|
4521 | 信息 | 结果 - 后视图扭矩较低 | 后视图扭矩低于最小水平。 |
|
|
|
|
4522 | 信息 | 结果 - 后视图扭矩较高 | 后视图扭矩超过最大水平。 |
|
|
|
|
4523 | 信息 | 结果 - 未达到后视图扭矩间隔 | 未达到后视图扭矩间隔。 |
|
|
|
|
4524 | 信息 | 结果 - 未达到扭矩补偿间隔 | 在未达到旋入端前的扭矩补偿间隔角度。 |
|
|
|
|
4525 | 信息 | 结果:工具移动超出限制 | 来自 NOK 拧紧详情状态。 |
|
|
|
|
4526 | 信息 | 结果 - 安全电流监测传感器不匹配 | 电流监测错误。 |
|
|
|
|
4527 | 信息 | 结果:工具移动超出限制 |
|
|
|
|
|
4528 | 信息 | 结果 - 软启动角度较高 | 软启动角度超过最大水平(四步)。 |
|
|
|
|
4529 | 信息 | 结果 - 软启动角度较低 | 软启动角度低于最小水平(四步)。 |
|
|
|
|
4530 | 信息 | 结果 - 第一角度较高 | 初始步骤角度超过最大水平(四步)。 |
|
|
|
|
4531 | 信息 | 结果 - 第一角度较低 | 初始步骤角度低于最小水平(四步)。 |
|
|
|
|
4532 | 信息 | 结果 - 第一扭矩较高 | 初始步骤扭矩超过最大水平(四步)。 |
|
|
|
|
4533 | 信息 | 结果 - 第一扭矩较低 | 初始步骤扭矩低于最小水平(四步)。 |
|
|
|
|
4534 | 信息 | 结果 - 第一时间较高 | 初始步骤时间超过最大水平(四步)。 |
|
|
|
|
4535 | 信息 | 结果 - 第一时间较低 | 初始步骤时间低于最小水平(四步)。 |
|
|
|
|
4536 | 信息 | 结果 - 最终时间较高 | 最终步骤时间超过最大水平(四步)。 |
|
|
|
|
4537 | 信息 | 结果 - 最终时间较低 | 最终步骤时间低于最小水平(四步)。 |
|
|
|
|
4538 | 信息 | 结果 - 最终监管扭矩较低 | 未达到最终监管扭矩。 |
|
|
|
|
4539 | 信息 | 结果 - 软启动时间较高 | 软启动时间超过最大水平(四步)。 |
|
|
|
|
4540 | 信息 | 结果 - 软启动时间较低 | 软启动时间低于最小水平(四步)。 |
|
|
|
|
4543 | 信息 | 结果 - 贴合监控高 | 仅限扳手。监控器检测到超出贴合数值。 | ||||
4545 | 信息 | 结果 - 无剩余扭矩 | 仅限扳手。残余扭矩低于阈值。 | ||||
4546 | 信息 | 结果 - 过速 | 仅限扳手。扳手陀螺仪因速度太高无法测量角度。 | ||||
4547 | 信息 | 结果 - 有效拧松 | 仅限扳手。扳手检测到意外拧松。 | ||||
4548 | 信息 | 结果 - 终值低于目标值 | 最终扭矩低于拧紧程序中设定的目标扭矩。 | ||||
4549 | 信息 | 超过 TurboTight 时间限制 | 超过了 TurboTight 时间限值。 | ||||
4550 | 信息 | 结果 - 旋入脉冲较高 | 超出最大旋入脉冲数量。 | ||||
4551 | 信息 | 结果 - 旋入脉冲较低 | 旋入在达到最小旋入脉冲数量数量之前已完成。 | ||||
4552 | 信息 | 结果 - 最终脉冲较高 | 超出最大脉冲数量。 | ||||
4553 | 信息 | 结果 - 最终脉冲较低 | 拧紧在达到最小脉冲数量数量之前已完成。 | ||||
4554 | 信息 | 切断电流高 | 切断时的电流超出电流上限。 | ||||
4555 | 信息 | 切断电流低 | 测得的切断电流低于电流下限 | ||||
4556 | 信息 | 多步骤未分类错误。 | 多步骤配置出错,通常与工具验证有关。 | ||||
4557 | 信息 | 结果过载 | X | X | |||
4600 | 警告 | 数据删除 (Data Drop) 或数据保持 (Data Hold) 与批次拧紧结合使用。信号无效。 | 数据删除 (Data Drop) 和数据保持 (Data Hold) 仅支持工作任务,不带批次控制。如果必须使用该信号,请选择另一个工作任务。 仅对 Flex 和 StepSync 有效。 | X | |||
4601 | 信息 | 数据保持 (Data Hold) 激活:信号低即发送拧紧结果。 | 仅对 Flex 和 StepSync 有效。 | X | |||
4602 | 信息 | 数据删除 (Data Drop) 激活:丢弃拧紧结果。 | 仅对 Flex 和 StepSync 有效。 | X | |||
5010 | 警告 | 无效的拧紧程序参数值 | 所选拧紧程序中的参数无效。 | 检查所选拧紧程序的配置,查找并更改参数值。 | X | X |
|
5020 | 信息 | 主触发器并非活动的启动来源 | 当配置为只通过下压式开关启动且用户按压主触发器时生成。直到用户按压下压式开关时生成。 | 按压下压式开关以启动工具。 | X | X |
|
5030 | 信息 | 拧紧程序复杂性超出工具负荷 | 所选的拧紧程序对工具来说太过复杂。工具将被锁定。 | 降低拧紧程序的复杂性,或者选择其他程序 | X | X | |
6010 | 信息 | 附件已连接 | 附件已连接至控制器。 |
| X | X | |
6020 | 信息 | 附件已断开 | 附件已从控制器断开。 |
| X | X | |
6021 | 警告 | 现场总线脱机 | 现场总线无通信。 | X | X | X | |
6030 | 警告 | 附件地址冲突 | 两个或更多附件使用相同的地址连接。 | 更改附件的地址。 | X | X | X |
6040 | 警告 | 附件通信错误 | 附件出现间歇的通信错误。 | 校验线缆和连接器。 | X | X |
|
6041 | 警告 | 现场总线错误 | 现场总线出现通信错误。 |
| X | X | X |
6042 | 警告 | 现场总线模块不匹配 | 安装的现场总线模块与配置的模块不匹配。 | 更改配置以使其与安装的模块匹配,或以正确的模块替换安装的模块。 | X | X | X |
6050 | 信息 | 所选套筒错误 | 没有选择任何套筒或选择了错误的套筒时生成。 | X | X |
| |
6090 | 警告 | 无法识别条码枪 | 未找到唯一序列号时。 | 配置条形码阅读器设备。 | X | X | X |
7010 | 信息 | 要显示的消息文本 | 显示消息的通用事件。 | 无 |
|
| X |
8200 | 信息 | 打开串行端口失败 | 无法打开要使用的串行端口。 | 检查串行端口连接。 | X | ||
8214 | 错误 | EHMI 软件版本不匹配 | EHMI 软件版本与控制器的兼容性不匹配。 | 更新 EHMI 的软件版本。 | X | X | |
查看 NOK 比率
转到主菜单中的报告,然后在左侧窗格中选择 NOK 比率。
选择查看 10 个最高的 NOK 拧紧程序。
参考
在本节中,您可以找到其他有用的信息。
术语和定义
术语 | 同义词 | 定义 | 注意 |
|---|---|---|---|
批次 | 使用相同拧紧程序和套筒进行多重拧紧 | ||
批次序列 | 顺序 | 使用不同的拧紧程序和套筒组合进行多重拧紧 | |
控制器 GUI | 控制器按钮或触摸屏式用户界面 | ||
事件 | 控制器和工具状态信号 | ||
最终角度 | 拧紧循环结束时测得的实际角度值 | ||
最终扭矩 | 拧紧循环结束时测得的实际扭矩值 | ||
图形用户界面 |
| 用户接口由交互式图形元素组成,如显示器上的窗口、图标和符号 |
|
HMI | 人机界面 | 工具或控制器的用户界面 | HMI 既可以是计算机上基于 Web 的界面,也可以是控制器上的触摸屏。 |
IAM | 智能应用模块 | 控制器中的可拆卸式模块,包含程序、配置参数和拧紧结果 | |
线路结构 | 在 ToolsTalk 中按照结构、文件夹和子文件夹排序并分组控制器 | 利用线路结构方法,能够以结构化的方式分组大量控制器,提升控制器的直观性。 | |
返回查看扭矩 | 用于监控并检测旋入完成之前的最大和最小扭矩值的功能 | 扭矩柱状图的用法之一就是用在自锁紧螺母上。 | |
拧紧程序 | 参数集 | 用于控制并监控单次拧紧动作并存储其拧紧结果的参数与值的配置 | |
推送 | 将 ToolsTalk 中保存的数据传输到数据库内存 | ||
QIF | 高质量集成式拧紧 | 完全集成系列的螺母扳手、控制器、附件以及流程监控工具,可在工业组装系统中保证拧紧的高质量和可追溯性 | QIF 由 Atlas Copco 开发,非常适合用于摩托车行业和其他需要大量连接件的装配情形。QIF 概念还包含过程监控与文档备案。 |
QIF 附件 | QIF 中用作操作员通信和指导的附件 | 用于在系统与操作员之间通信的附件产品。例如:条形码枪、操作员面板、多层警示灯和套筒选择器。通过通信,可改善装配过程的质量与可追溯性。 | |
快速拧紧步骤 | 拧紧策略 | 是一种通过以给定扭矩和速度进行的初始拧紧步骤,然后在最后阶段降低目标转速,来减少连接件预载荷分布的拧紧策略。 | |
重复拧紧检测 | detection of re-tightening of an already tightened joint | ||
旋转 | 旋转工具机头的拧紧策略。 | 旋转主要用于测试或演示目的。 | |
旋入完成 | 当螺钉头部接触表面时旋入步骤结束,同时拧紧步骤开始 | ||
旋入步骤 | 螺栓进入螺纹直到螺栓头部接触表面为止的步骤 | ||
贴合 | 螺钉或螺栓通过手指初步旋紧至表面 | ||
套筒选择器 | QIF 附件,包含带灯的套筒架,可用于引导操作员选择正确的套筒 | ||
软启动 | 通过指定旋转角度以低速开始拧紧 | 利用此功能,可协助螺栓以受控的方式旋入螺纹,并可避免压下触发器时发生意外的人因工具移动。 | |
多层警示灯 | QIF 附件,通过数字信号处理操作员与控制器之间的通讯,例如灯、按钮、开关和蜂鸣器。 | ||
目标 | 所需的拧紧结果 | 目标可通过扭矩或角度来表示。 | |
目标角度 | 拧紧循环完成时所需的角度值(从参考点测量) | ||
目标扭矩 | 拧紧循环结束时所需的扭矩值 | ||
三步拧紧 | 拧紧策略 | 是一种通过以受限与给定扭矩和速度进行的初始拧紧,然后短暂松开,最后降低速度进行最终拧紧的方式,从而减少连接件预载荷分布和松弛效果的拧紧策略。 | |
拧紧步骤 | 从螺栓头部接触表面开始,拧紧至所需的目标扭矩或目标角度为止的步骤 | ||
拧紧策略 | 用于持续控制并监测拧紧过程的算法 | 用户可选择针对连接件和程序某些参数优化过的策略。 | |
TurboTight | 拧紧策略 | 基于工具执行速度很快且符合人体工学的拧紧操作的最大速度的拧紧策略。此策略仅需设置目标扭矩值。 | |
两步拧紧 | 拧紧策略 | 是一种通过以受限与给定扭矩和速度进行的初始拧紧,然后短暂停止,最后降低速度进行最终拧紧的方式,从而减少连接件预载荷分布和松弛效果的拧紧策略。 | |
Web GUI | 用于通过远程计算器的 Web 浏览器访问控制器的用户界面 | ||
虚拟站点 | 虚拟控制器 | 物理控制器的软件抽象化表述,可模拟多个控制器 | 控制器只可连接一个电缆工具,但却可以连接多个无线工具。每个工具与各自虚拟站点相连。 |
虚拟站点类型 | 包含一组控制器特征的许可证。 | 运行虚拟站点需要此许可证。 | |
虚拟站点特征 | 单个特征的许可证。 | 可用于补充虚拟站点类型许可证。 | |
控制器特征 | 控制器范围特征的许可证,例如 Soft PLC 和 StepSync。 | 分配给整个控制器,可供所有虚拟站点使用。 |
输入信号
代码 | 输入信号 | 类型 | 说明 |
|---|---|---|---|
10001 | 批次递增 | 事件 | 批次计数以 1 为单位递增。 |
10002 | 批次递减 | 事件 | 批次计数以 1 为单位递减。 |
10003 | 重置批次 | 事件 | 批次计数器重置为 0。无批次 OK(nxOK)。如果激活批次 OK,则它会被停用。 |
10004 | 确认事件 | 事件 | 确认事件。 |
10005 | 主机解锁 | 事件 | 将锁定页面中确定的大部分锁定解锁。 |
10006 | 条形码 | 事件 | 例如当 USB 条形码扫码枪扫描到条形码时生成。 |
10007 | 停止驱动 | 事件 | 仅限控制器内部使用,被锁具用来停止不断进行的拧紧,参阅“锁定”标签 |
10008 | 忽略拧紧程序 | 事件 | 在正在运行的批次序列中跳过下一个拧紧程序。 |
10010 | 开始拧紧 | 状态 | 激活信号开始拧紧。一旦输入信号停止,拧紧也必须停止。 |
10011 | 开始拧松 | 状态 | 激活信号开始拧松。一旦数字输入信号停止,拧松也必须停止。 |
10012 | 中止序列 | 事件 | 接收到批次序列终止请求时,批次序列功能将等待正在进行的拧紧结果完成,然后再终止批次序列。 |
10013 | 重置过多 NOK | 事件 | 收到锁定“Too Many NOK”(过多 NOK)后,重置批次。 |
10014 | 套筒升高 | 状态 | 当唯一的套筒在套筒选择器上升高(整数 = 套筒 ID)、无套筒升高(整数 = 0)或当一个以上的套筒升高(整数 = 0)时生成。 |
10015 | 协议消息准备就绪 | 事件 | 当协议消息排队等候时报告。 |
10016 | 选择输入位 0 | 状态 | 选定位元 0 的输入信号。 |
10017 | 选择输入位 1 | 状态 | 选定位元 1 的输入信号。 |
10018 | 选择输入位 2 | 状态 | 选定位元 2 的输入信号。 |
10019 | 选择输入位 3 | 状态 | 选定位元 3 的输入信号。 |
10020 | 选择输入 | 状态 | 输入选择的值。 |
10021 | 设置双稳态继电器 | 事件 | 设置双稳态继电器输出。 |
10022 | 重置双稳态继电器 | 事件 | 重置双稳态继电器输出。 |
10024 | 拧紧脉冲启动 | 事件 | 拧紧在出现信号时开始。直至拧紧结束或直至拧紧程序按出现 30 秒超时结束。 |
10028 | 启动驱动器 | 状态 | 激活信号启动工具(默认操作模式为拧紧)。信号一中断,工具就必须停止。用于结合 10029 使用(选择拧松)。 |
10029 | 选择拧松 | 状态 | 选择拧松作为默认操作模式,并结合 10028 使用(开始驱动)。 |
10030 | 脉冲停止 | 事件 | 如果产生此信号,将停止任何进行的拧紧操作。与 10024 联用。 |
10035 | 外部监控 1 | 状态 | |
10036 | 外部监控 2 | 状态 | |
10037 | 外部监控 3 | 状态 | |
10038 | 外部监控 4 | 状态 | |
10039 | 外部监控 5 | 状态 | |
10040 | 外部监控 6 | 状态 | |
10041 | 外部监控 7 | 状态 | |
10042 | 外部监控 8 | 状态 | |
10043 | 套筒升高原料 | 状态 | |
10045 | 外部标识符 | 状态 | 提供最多 2 个标识符,从现场总线传递以进行任务选择。 |
10046 | 套筒选择器外部绿光 | 状态 | 当套筒选择器处于外部模式时,控制绿灯(多台物理设备如何映射到由套筒选择器资源配置定义的逻辑套筒)字节 0 — 逻辑套筒 1-4,字节 1 — 逻辑套筒 5-8,字节 2 — 逻辑套筒 9-12,字节 3 — 逻辑套筒 13-16(每个套筒 2 位,00=关闭,01=闪灯,10=稳定) |
10047 | 套筒选择器外部红光 | 状态 | 当套筒选择器处于外部模式时,控制绿灯。参见 10046,了解详情。 |
10048 | 软选择输入值 | 状态 | 输入软选择值 |
10049 | 停用现场总线 | 状态 | 停用现场总线。 |
10050 | 用户 ID | 状态 | 用户 ID |
10051 | 解锁工具开启完成 | 事件 | 结束时解锁由工具锁定来锁定的工具。 |
10053 | 重置批次序列 | 事件 | 重置批次序列。结束时解锁由工具锁定来锁定的工具。 |
10058 | 工具绿色 LED 闪烁 | 事件 | |
10059 | 解锁工具开启禁用 | 事件 | |
10060 | 禁用开放协议命令 | 状态 | |
10061 | 手动模式 | 状态 | |
10063 | 外部正常 | 事件 | |
10066 | 选择输入位 4 | 状态 | |
10067 | 选择输入位 5 | 状态 | |
10068 | 选择输入位 6 | 状态 | |
10069 | 选择输入位 7 | 状态 | |
10070 | 选择输入位 8 | 状态 | |
10071 | 选择输入位 9 | 状态 | |
10073 | 动态批次大小的拧紧程序 ID | 状态 | |
10074 | 设定动态批次大小 | 状态 | |
10075 | 激活工具扫码枪 | 事件 | 输入信号从外部源激活工具扫码枪。 |
10105 | 重置结果数据 | 状态 | 重置结果数据 |
10114 | 重置最新标识符 | 事件 | 重置最新的标识符 |
30000 | 禁用工具 | 状态 | 立即停止并锁定工具。 |
30004 | 读取结果握手 | 状态 | |
30005 | 结果队列刷新 | 事件 | |
30007 | 选择拧紧程序并设置批次大小 | 状态 |
锁定使用的输入信号
代码 | 输入信号 | 类型 | 说明 |
|---|---|---|---|
20002 | 锁定拧紧 | 状态 | 工具被数字输入锁住进行拧紧。 |
20003 | 锁定拧松 | 状态 | 锁定拧松 |
20004 | 锁定工具高态有效 | 状态 | 锁定工具高态有效 |
20020 | 现场总线锁拧紧 | 状态 | 现场总线锁定拧紧 |
20021 | 现场总线锁松开 | 状态 | 现场总线锁定拧松 |
20040 | SoftPLC 锁定拧紧 | 状态 | |
20041 | SoftPLC 锁定拧松 | 状态 | |
20061 | 锁定工具低态有效 | 状态 | 此信号低时锁定工具。 |
输出信号
代码 | 输出信号 | 类型 | 说明 |
|---|---|---|---|
1 | 此刻任务 | 状态 | 提供当前任务。 |
2 | 操作模式下 | 状态 | 列出操作模式。 |
3 | 拧紧 OK | 事件 | “拧紧 OK”说明拧紧结果在规定限制范围内。 |
4 | 拧紧 NOK | 事件 | “拧紧 NOK”说明至少一个拧紧结果超出规定限制范围,或者另一个不可接受事件发生。 |
5 | 最终扭矩 | 事件 | |
6 | 扭矩过小 | 事件 | 扭矩结果低于最小扭矩限值。 |
7 | 扭矩过大 | 事件 | 扭矩结果高于最大扭矩限值。 |
8 | 最终角度 | 事件 | |
9 | 角度过小 | 事件 | 角度结果低于最小角度限值。 |
10 | 角度过大 | 事件 | 角度结果高于最大角度限值。 |
11 | 按下触发器 | 状态 | 表示工具触发器已经按下。 |
12 | 方向开关顺时针 | 状态 | 工具上的方向开关以顺时针转动。 |
13 | 方向开关逆时针 | 状态 | 工具上的方向开关以逆时针转动。 |
21 | 工具拧紧中 | 状态 | 工具沿拧紧方向运转。 |
22 | 工具反松中 | 状态 | 工具沿拧松方向运转。 |
23 | 工具运行中 | 状态 | 表示工具正在转动(顺时针 [CW] 或逆时针 [CCW])。 |
24 | 工具旋转顺时针 | 状态 | 右旋螺纹的工具转动方向为顺时针。 |
25 | 工具旋转逆时针 | 状态 | 左旋螺纹的工具转动方向为逆时针。 |
26 | 螺纹方向逆时针 | 状态 | 为选定 p-set 选择的螺纹方向为逆时针。 |
27 | 拧紧已被锁定 | 状态 | 拧紧被禁用。 |
28 | 反松已被锁定 | 状态 | 拧松被禁用。 |
29 | 准备好启动 | 状态 | 表示是否可以开始拧紧。 |
30 | 批次已完成 | 事件 | 批次计数器等于批次容量数字。结果可能是 OK 或 NOK。 |
31 | 批次计数 | 状态 | 批次中的当前数字。仅可以在显示器中查看。 |
32 | 批次进行中 | 状态 | 表示批次序列中的一个批次正在运行。 |
33 | 剩余批次 | 状态 | 批次中的剩余拧紧数。仅可以在显示器中查看。 |
34 | 测试输出信号 | 状态 | 反映测试信号输入。 |
35 | 最大连续异常次数 | 事件 |
|
36 | 批次结束 OK | 事件 | 批次完成,状态 OK。 |
37 | 批次结束 NOK | 事件 | 批次完成,状态 NOK。 |
39 | 清除结果 | 事件 | 清除设置为下一次拧紧的其他信号的状态。 |
40 | 双稳态继电器 | 状态 | 根据 2 种输入信号:设置/重置双稳态继电器。 |
42 | 控制器启动 | 状态 | IOExchange 启动时设为真。 |
45 | 批次序列正常完成 | 事件 | 批次序列完成,状态 OK。 |
46 | 批次序列完成 NOK | 事件 | 批次序列完成,状态 NOK。 |
47 | 批次序列运行中 | 状态 | 选定了一个批次序列并且正在运行。 |
48 | 批次序列完成 | 事件 | 批次序列计数器等于批次序列容量。结果可能是 OK 或 NOK。 |
50 | 一般 I/O 1 | 状态 | |
51 | 一般 I/O 2 | 状态 | |
52 | 一般 I/O 3 | 状态 | |
53 | 一般 I/O 4 | 状态 | |
54 | 一般 I/O 5 | 状态 | |
55 | 一般 I/O 6 | 状态 | |
56 | 一般 I/O 7 | 状态 | |
57 | 一般 I/O 8 | 状态 | |
58 | 一般 I/O 9 | 状态 | |
59 | 一般 I/O 10 | 状态 | |
69 | 选择的拧紧程序 | 状态 | 已选拧紧程序的实际 ID,如果未选择拧紧程序,则为 0。 |
70 | 反松正常 | 事件 | 正常拧松发生。 |
71 | 站准备好 | 状态 | 站已准备好。 |
73 | 工具已连接 | 状态 | 如果工具已连接并配置到虚拟站点,那么此 IO 已激活。 |
74 | 拧松 NOK | 事件 | 拧松 NOK 发生。 |
84 | 所选批次序列 ID | 状态 | |
85 | 软件发布版本 | 状态 | 正在运行的软件版本。 |
86 | 软件主要版本 | 状态 | |
87 | 软件次要版本 | 状态 | |
88 | 配置版本 | 状态 | |
89 | 开口端处于打开位置 | 状态 | 开口端工具处于打开位置。 |
90 | 工具电池电量低 | 事件 | 工具电池电量低。 |
92 | 工作处于作业区 | 状态 | |
93 | 工作处于生产区 | 状态 | |
94 | 工具 TAG 标识符 | 状态 | |
95 | 开放协议已断开 | 状态 | |
96 | 现场总线已断开 | 状态 | |
97 | 红色工具 LED 指示灯 | 事件 | |
98 | 绿色工具 LED 指示灯 | 事件 | |
99 | 黄色工具 LED 指示灯 | 事件 | |
100 | 标识符已收到 | 事件 | |
101 | 手动模式 | 状态 | |
103 | 工具健康 OK | 状态 | |
104 | 通过识别符 | 事件 | 输出信号用于将扫描的字符串从扫码枪发送到外部设备 |
105 | 虚拟站点名称 | 状态 | 提供虚拟站点名称 |
132 | 程序开始 | 事件 | 程序开始 |
10043 | 套筒升高 | 事件 | |
20036 | 紧急停止 | 状态 | |
20039 | 套筒选择器断开锁定 | 状态 | |
30001 | 事件代码 | 状态 | 触发事件时中继事件。瞬时,开启两个循环时间。 |
30002 | 现场总线保持活动 | 状态 | |
30003 | 事件代码严重性 | 状态 | |
30006 | 结果队列刷新确认 | 状态 | |
30100 | 目标扭矩 | 事件 | |
30101 | 目标/最终扭矩 | 事件 | |
31000 | 拧紧 OK | 状态 | |
31001 | 拧紧 NOK | 状态 | |
31002 | 最终扭矩 | 状态 | |
31003 | 最终角度 | 状态 | |
31004 | 拧紧程序最大角度 | 状态 | |
31005 | 拧紧程序最小角度 | 状态 | |
31006 | 最终角度状态 | 状态 | |
31007 | 拧紧程序最大扭矩 | 状态 | |
31008 | 拧紧程序最小扭矩 | 状态 | |
31009 | 最终扭矩状态 | 状态 | |
31010 | 拧紧完成 | 状态 | |
31011 | 现场总线工具结果 LED 红色 | 状态 | |
31012 | 现场总线工具结果 LED 绿色 | 状态 | |
31013 | 现场总线工具结果 LED 黄色 | 状态 | |
31014 | 现场总线拧紧重复拧紧 | 状态 | |
31015 | 最终目标扭矩 | 状态 | 报告拧紧程序的目标扭矩 |
31016 | 启动最终角度 | 状态 | 如果可用,报告启动最终角度值。 |
31017 | 最终测得的电流 | 状态 | 最终角度和最终扭矩测量步骤中的电流。 |
31018 | 拧紧总数 | 状态 | 工具在整个寿命期间执行的拧紧总数。 |
31019 | 第一目标扭矩 | 状态 | 完成拧紧后报告第一个目标扭矩。 |
31020 | 最终目标速度 | 状态 | 拧紧程序最后一步的目标速度。 |
31021 | 工具序列号数字 | 状态 | 序列号的整数部分。 |
List of Third Party Softwares
The following third party softwares are included in this product. The license texts are available in alphabetic order following this table.
Software | Version | License |
|---|---|---|
alsa-conf-base | 1.0.27.2 | LGPL V2.1 |
alsa-lib | 1.0.27.2 | LGPL V2.1 |
alsa-state | 0.2.0 | MIT |
alsa-states | 0.2.0 | MIT |
alsa-tools | 1.0.27 | GNU GPL V2 |
alsa-utils | 1.0.27.2 | GNU GPL V2 |
alsa-utils-aconnect | 1.0.27.2 | GNU GPL V2 |
alsa-utils-alsactl | 1.0.27.2 | GNU GPL V2 |
alsa-utils-alsaloop | 1.0.27.2 | GNU GPL V2 |
alsa-utils-alsamixer | 1.0.27.2 | GNU GPL V2 |
alsa-utils-alsaucm | 1.0.27.2 | GNU GPL V2 |
alsa-utils-amixer | 1.0.27.2 | GNU GPL V2 |
alsa-utils-aplay | 1.0.27.2 | GNU GPL V2 |
alsa-utils-aseqdump | 1.0.27.2 | GNU GPL V2 |
alsa-utils-aseqnet | 1.0.27.2 | GNU GPL V2 |
alsa-utils-iecset | 1.0.27.2 | GNU GPL V2 |
alsa-utils-midi | 1.0.27.2 | GNU GPL V2 |
alsa-utils-speakertest | 1.0.27.2 | GNU GPL V2 |
apm | 3.3.2-14 | GPLv2 |
apmd | 3.2.2-14 | GPLv2 |
atftpd | 0.7.1+gitAUTOINC+be3291a18c | GNU GPL V2 |
base-files | 3.0.14 | GNU GPL V2 |
base-passwd | 3.5.29 | GNU GPL V2 |
bash | 4.3 | GNU GPL V3 |
bash-completion | 2.1 | GNU GPL V2 |
bluetooth-test | 1.0 | GNU GPL V1.0 |
boost | 1.55.0 | BSL-1.0 MIT Python-2.0 |
boost-serialization | 1.55.0 | BSL-1.0 MIT Python-2.0 |
boost-test | 1.55.0 | BSL-1.0 MIT Python-2.0 |
bt-aux | 1.0 | GNU GPL V1.0 |
busybox | 1.22.1 | GNU GPL V2 |
busybox-cron | 1.22.1 | GNU GPL V2 |
busybox-hwclock | 1.22.1 | GNU GPL V2 |
busybox-udhcpc | 1.22.1 | GNU GPL V2 |
busybox-udhcpd | 1.22.1 | GNU GPL V2 |
ca-certificates | 20130610 | GNU GPL V2 |
cppunit | 1.13.1 | LGPL V2.1 |
curl | 7.35.0 | MIT |
dbus-1 | 1.6.18 | GNU GPL V2 |
dbus-c++ | 0.9.0+gitrAUTOINC+1f6f3e6e96 | LGPL V2.1 |
directfb-config | 1.0 | GNU GPL V1.0 |
dropbear | 2014.63 | BSD V3 |
e2fsprogs | 1.42.9 | GNU GPL V2 |
e2fsprogs-badblocks | 1.42.9 | GNU GPL V2 |
e2fsprogs-e2fsck | 1.42.9 | GNU GPL V2 |
e2fsprogs-mke2fs | 1.42.9 | GNU GPL V2 |
e2fsprogs-tune2fs | 1.42.9 | GNU GPL V2 |
eclr | 2.2.0.20725 | MIT |
ecryptfs-tools | 1.0 | GNU GPL V1.0 |
fbset | 2.1 | GNU GPL V2 |
fbset-modes | 0.1.0 | MIT |
fb-test | 1.1.0 | GNU GPL V2 |
fieldbus-test | 1.0 | GNU GPL V1.0 |
firmware-imx | 3.10.17-1.0.0 | Proprietary |
firmware-imx-sdma-imx51 | 3.10.17-1.0.0 | Proprietary |
firmware-imx-vpu-imx51 | 3.10.17-1.0.0 | Proprietary |
fsb | 0.0.1 | GNU GPL V1.0 |
gdbserver | 7.6.2 | GNU GPL V2 |
gnutls | 3.2.13 | LGPL V2.1 |
gpio | 1.0 | GNU GPL V1.0 |
groupexec | 0.0.1 | GNU GPL V1.0 |
gstreamer | 0.10.36 | LGPL V2.1 |
gstreamer1.0 | 1.2.3 | LGPL V2.1 |
gwt | 2.6.1 | Apache V2 |
gwt-ns | 0.2.1 | Apache V2 |
hwtest | 1.1 | GPL-1.0 |
Initscripts | 1.0 | GPLv2 |
initscripts-functions | 1.0 | GPLv2 |
ioaccess | 1.0 | GPL-1.0 |
ipwatchd | 1.2 | GPL-1.0 |
json-c | 0.11 | MIT |
kernel-3.14.79-rt84-atlas | 3.14 | GNU GPL V2 |
kernel-base-generic | 0.1+hg-8d6f9d23fb4a-r8-px2pfm4.12 | GNU GPL V2 |
kernel-base-px2drv | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
kernel-dev-generic | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
kernel-devicetree | 3.14 | GNU GPL V2 |
kernel-dev-px2drv | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
kernel-generic | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
kernel-image-3.14.79-rt84-atlas | 3.14 | GNU GPL V2 |
kernel-module-configfs | 3.14 | GPLv2 |
kernel-module-emergencystop | 0.0.1 | MIT |
kernel-module-evbug | 3.14 | GPLv2 |
kernel-module-ioaccess | 1 | GNU GPL V2 |
kernel-module-isofs | 3.14 | GPLv2 |
kernel-module-msdos | 3.14 | GPLv2 |
kernel-module-nls-iso8859-15 | 3.14 | GPLv2 |
kernel-module-owl2xx | 3.1.6 | MIT |
kernel-module-owl2xx-spi | 3.1.6 | MIT |
kernel-px2drv | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
kernel-module-serport | 3.14 | GPLv2 |
kernel-module-udf | 3.14 | GPLv2 |
kernel-modules | 3.14 | GPLv2 |
kernel-vmlinux-generic | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
kernel-vmlinux-px2drv | 2.6.22.6-r8-px2pfm4.12 | GNU GPL V2 |
keytest | 1 | GNU GPL V1.0 |
keyutils | 1.5.2 | GNU GPL V2 |
kmsfbwrap | 12.0 | GNU GPL V2 |
libanybus1 | 1.1 | LICENSE |
libapm1 | 3.2.2-14 | GPLv2 |
libasound2 | 1.0.27.2 | LGPL V2.1 |
libblkid1 | 2.24.1 | GNU GPL V2 |
libboost-date-time1.55.0 | 1.55.0 | MIT |
libboost-filesystem1.55.0 | 1.55.0 | MIT |
libboost-graph1.55.0 | 1.55.0 | MIT |
libboost-iostreams1.55.0 | 1.55.0 | MIT |
libboost-program-options1.55.0 | 1.55.0 | MIT |
libboost-regex1.55.0 | 1.55.0 | MIT |
libboost-signals1.55.0 | 1.55.0 | MIT |
libboost-system1.55.0 | 1.55.0 | MIT |
libboost-thread1.55.0 | 1.55.0 | MIT |
libbz2-0 | 1.0.6 | bzip2 |
libc6 | 2.19 | GNU GPL V2 |
libcap2 | 2.22 | BSD V2 |
libcom-err2 | 1.42.9 | GNU GPL V2 |
libcrypto1.0.0 | 1.0.1p | openssl |
libcurl5 | 7.36.0 | MIT |
libdbus-1-3 | 1.6.18 | GNU GPL V2 |
libdrm2 | 2.4.52 | MIT |
libe2p2 | 1.42.9 | GNU GPL V2 |
libegl1 | 11.09.01 | Proprietary |
libestr0 | 0.1.6 | LGPL V2.1 |
libevent | 2.0.21 | BSD V2 |
libexpat1 | 2.1.0 | MIT |
libext2fs2 | 1.42.9 | GNU GPL V2 |
libffi6 | 3.0.13 | MIT |
libformw5 | 5.9 | MIT |
libfuse2 | 2.9.3 | GNU GPL V2 |
libgcc1 | 4.8.4 | GNU GPL V3 |
libgcrypt11 | 1.5.3 | LGPL V2.1 |
libglesv2-2 | 11.09.01 | Proprietary |
libglib-2.0-0 | 2.38.2 | LGPL V2.1 |
libgmp10 | 5.1.1 | GNU GPL V3 |
libgnutls26 | 2.12.23 | GPLv3 LGPLv2.1 |
libgpg-error0 | 1.12 | LGPL V2.1 |
libgsl-fsl1 | 11.09.01 | Proprietary |
libgstapp-1.0-0 | 1.2.4 | GNU GPL V2 |
libgstaudio-1.0-0 | 1.2.4 | GNU GPL V2 |
libgstpbutils-1.0-0 | 1.2.4 | GNU GPL V2 |
libgsttag-1.0-0 | 1.2.4 | GNU GPL V2 |
libgstvideo-1.0-0 | 1.2.4 | GNU GPL V2 |
libicudata53 | 53.1 | ICU |
libicui18n53 | 53.1 | ICU |
libicuuc53 | 53,1 | ICU |
libjpeg8 | 8d | BSD V3 |
libkmod2 | 17+ | LGPL V2.1 |
libluabind0 | git | MIT |
liblzo2-2 | 2.06 | LGPL V2.1 |
libmenuw5 | 5.9 | MIT |
libmount1 | 2.24.2 | GNU GPL V2 |
libncursesw5 | 5.9 | MIT |
libnet1 | 1.1.6 | BSD V2 |
libnfsidmap0 | 0.25 | BSD V2 |
libopkg1 | 0.2.2 | GNU GPL V2 |
liborc-0.4-0 | 0.4.18 | BSD V2 |
libpanelw5 | 5.9 | MIT |
libpcap1 | 1.5.3 | BSD V2 |
libpcre1 | 8.34 | BSD |
libperl5 | 5.14.3 | GNU GPL V1.0 |
libpng16-16 | 1.6.10 | Libpng |
libpopt0 | 1.16 | MIT |
libpx2dbus | 1.0.0 | GNU GPL V1.0 |
libqt5sensors5 | 5.3.1 | LGPL V2.1 |
librcf | 2.0 | Proprietary |
libreadline6 | 6.3 | GNU GPL V3 |
libsamplerate0 | 0.1.8 | GNU GPL V2 |
libsndfile1 | 1.0.25 | LGPL V2.1 |
libsqlite3-0 | 3.8.4.3 | PD |
libss2 | 1.42.9 | GNU GPL V2 |
libssl1.0.0 | 1.0.1p | openssl |
libstdc++6 | 4.8.4 | GNU GPL V3 |
libthread-db1 | 2.19 | GNU GPL V2 |
libsysfs2 | 2.1.0 | GPLv2 LGPLv2.1 |
libtasn1-6 | 3.4 | GPLv3 LGPLv2.1 |
libtinfo5 | 5.9 | MIT |
libtinyxml2.6.2 | 2.6.2 | Zlib |
libtirpc1 | 0.2.4 | BSD V2 |
libts-1.0-0 | 1.1 | LGPL V2.1 |
libudev0 | 182 | LGPL V2.1 |
liburcu | 0.8.1 | LGPL V2.1 |
libusb-1.0-0 | 1.0.9 | LGPL V2.1 |
libuuid1 | 2.24.2 | GNU GPL V2 |
libwrap0 | 7.6 | BSD V2 |
libxml2 | 2.9.1 | MIT |
libxlst | 1.1.28 | MIT |
libz1 | 1.2.8 | Zlib |
logrotate | 3.8.7 | GNU GPL V2 |
log-server | 1.0 | GNU GPL V1.2 |
loopback | 1.0 | GNU GPL V1.2 |
lttng-tools | v2.4.0 | GNU GPL V2 |
lttng-ust | 2.4.0 | LGPL V2.1 |
lua5.1 | 5.1.5 | MIT |
luabind | 0.9.1 | MIT |
lzop | 1.03 | GNU GPL V2 |
memlogd | 1.0 | MIT |
modutils-initscripts | 1.0 | PD |
mtd-utils | 1.5.1 + gitAUTOINC+9f107132a6 | GNU GPL V2 |
nano | 2.2.5 | GNU GPL V2 |
ncurses | 5.9 | MIT |
ncurses-terminfo | 5.9 | MIT |
ncurses-terminfo-base | 5.9 | MIT |
netbase | 5.2 | GNU GPL V2 |
nettle | 2.7.1 | LGPL V2.1 |
nfs-utils | 1.2.9 | GNU GPL V2 |
nfs-utils-client | 1.2.9 | GNU GPL V2 |
nginx | 1.4.4 | BSD-2-Clause |
ntp | 4.2.6p5 | Ntp License |
ntp-tickadj | 4.2.6p5 | Ntp License |
ntp-utils | 4.2.6p5 | Ntp License |
ntpdate | 4.2.6p5 | Ntp License |
openssh | 6.5p1 | BSD |
openssh-keygen | 6.5p1 | BSD |
openssh-scp | 6.5p1 | BSD |
openssh-sftp | 6.5p1 | BSD V2 |
openssh-sftp-server | 6.5p1 | BSD V2 |
openssh-ssh | 6.5p1 | BSD V2 |
openssh-sshd | 6.5p1 | BSD V2 |
openssl-conf | 1.0.1p | openssl |
opkg | 0.2.2 | GNU GPL V2 |
opkg-collateral | 1.0 | MIT |
opkg-config-base | 1.0 | MIT |
os-release | 1.0 | MIT |
packagegroup-atlas-qt5 | 1 | MIT |
packagegroup-core-boot | 1 | MIT |
packagegroup-core-eclipse-debug | 1 | MIT |
packagegroup-core-nfs-server | 1 | MIT |
packagegroup-core-ssh-dropbear | 1 | MIT |
packagegroup-px2it | 1 | MIT |
partitions | 1.0 | MIT |
perl | 5.14.3 | GNU GPL V1.0 |
pfmfonts | 0.0.1 | Apache V2 |
pfmtool | 1 | MIT |
pfmtool-bash-completion | 1 | MIT |
pfmversion | 5.14.0 | MIT |
pointercal | 0.0 | MIT |
poky-feed-config-opkg | 1.0 | MIT |
px2checksumv | 1.0 | MIT |
px2hal | 0.0.1 | LGPL-3.0 |
px2initit | 1.0 | GPL-1.0 |
px2network | 1.0 | GPL-1.0 |
px2serviced | 1.0 | GPL-1.0 |
px2switch | 0.0.1 | GPL-1.0 |
px2w | 0.0.1 | GPL-1.0 |
px2watchdog | 1.0 | GPL-1.0 |
qcustomplot | 1.2.1 | Commercial |
qt3d | 5.3.0+ | LGPL V2.1 |
qtbase | 5.3.1 | LGPL V2.1 |
qtbase-plugins | 5.3.1 | LGPL V2.1 |
qtbase-tools | 5.3.1 | LGPL V2.1 |
qtdeclarative | 5.3.1 | LGPL V2.1 |
qtlocation | 5.3.1 | LGPL V2.1 |
qtscript | 5.3.1 | LGPL V2.1 |
qtwebkit | 5.3.1 | LGPL V2.1 |
rhapsody-oxf | 7521 | GNU GPL V1.0 |
rpcbind | 0.2.1 | BSD V2 |
rsync | 3.1.0 | GNU GPL V3 |
rsyslog | 7.4.4 | GNU GPL V3 |
rtctest | 1.0 | GNU GPL V1.0 |
run-postinsts | 1.0 | MIT |
shadow | 4.1.4.3 | BSD V2 |
shadow-securetty | 4.1.4.3 | MIT |
sqlite3 | 3.8.4.3 | PD |
ssh-keys | 1.0 | GNU GPL V1.0 |
strace | 4.8 | BSD V2 |
sysfsutils | 2.1.0 | GPLv2 LGPLv2.1 |
sysvinit | 2.88dsf | GNU GPL V2 |
sysvinit-inittab | 2.88dsf | GNU GPL V2 |
sysvinit-pidof | 2.88dsf | GNU GPL V2 |
tcf-agent | 0.4.0+ | EPL V1.0 |
tcpdump | 4.3.0 | BSD V2 |
tslib-calibrate | 1.1 | LGPL V2.1 |
tslib-conf | 1.1 | LGPL V2.1 |
tslib-tests | 1.1 | LGPL V2.1 |
tzdata | 2013i | BSD V2 |
tzdata-africa | 2013i | BSD V2 |
tzdata-americas | 2013i | BSD V2 |
tzdata-antarctica | 2013i | BSD V2 |
tzdata-arctic | 2013i | BSD V2 |
tzdata-asia | 2013i | BSD V2 |
tzdata-atlantic | 2013i | BSD V2 |
tzdata-australia | 2013i | BSD V2 |
tzdata-europe | 2013i | BSD V2 |
tzdata-misc | 2013i | BSD V2 |
tzdata-pacific | 2013i | BSD V2 |
tzdata-posix | 2013i | BSD V2 |
tzdata-right | 2013i | BSD V2 |
u-boot-image | 2014.04 | GNU GPL V2 |
u-boot-utils | 2014.04 | GNU GPL V2 |
udev | 182 | GNU GPL V2 |
udev-cache | 182 | GNU GPL V2 |
udev-extraconf | 1.0 | MIT |
udev-utils | 182 | GNU GPL V2 |
update-alternatives-opkg | 0.1.8+gitAUTOINC+c33b217016 | GNU GPL V2 |
update-rc.d | 0.7 | GNU GPL V2 |
usbutils | 7 | GNU GPL V2 |
usbutils-ids | 7 | GNU GPL V2 |
wireless-tools | 30.pre9 | GNU GPL V2 |
wpa-supplicant | 2.3 | BSD V2 |
wpa-supplicant-cli | 2.3 | BSD V2 |
wpa-supplicant-passphrase | 2.3 | BSD V2 |
xerces-c | 2.7.0aes | Apache V2 |
zipfirmware-install-px2drv-tplcpx-4. | 3.0 | BSD V3 |